(54) СИСТЕМА Изобретение относится к управлению механизмами с шаговым режимом работы в частности, к системам управления движением механизмов копьцевой нагревательной печи. Известны системы автоматического управления механизмами участка кольцевых нагревательных печей ,обеспечивак щие только визуальный контроль за положением спитков в печи - картина загрузки отражается на лимбе - указателе, вращающемся синхронно с подом печи, что не позволяет контролировать без участия оператора наличие слитка на оси выгрузки и автоматически учитывать йту информацию при формировании команд на выгрузку 1. Наиболее близкой к изобретению по технической сущности и достигаемому результату является автоматизированная си стема управления, содержащая связанный с подом печи датчик импульсов, соедин- ненный с ним блок управления движением пода печи, управляемый сигналами об УПРАВЛЕНИЯ МЕХАНИЗМАМИ УЧАСТКА КОЛЬЦЕВОЙ НАГРЕВАТЕЛЬНОЙ ПЕЧИ окончании циклов нагрузки и Из1грузки с соответствующих сигнальных выходов блоков формирования команд на загрузку и выгрузку, группа управляющих входов каждого из которых псчхкпючена к соответ ствующей группе датчиков положения исполнительных механизмов, при этом прямой выход блока управления движением пода подключается к приводу пода, а его инверсный выход соединен с другими управляющими входами блока формирования команд на загрузку и выгрузку 2. В известной системе информация о попожении заготовок в печи не может быть учтена при автоматизированной выгрузке, и для предотвращения холостых циклов выгрузочного оборудования (например при неполной загрузке печи) требуется ручное вмешательство при постоянном визуаго ном контроле за выгрузкой. Цепь изобретения - снижение трудоемкости управления и повышение экономичности печи. 3 Поставленная цепь достигается
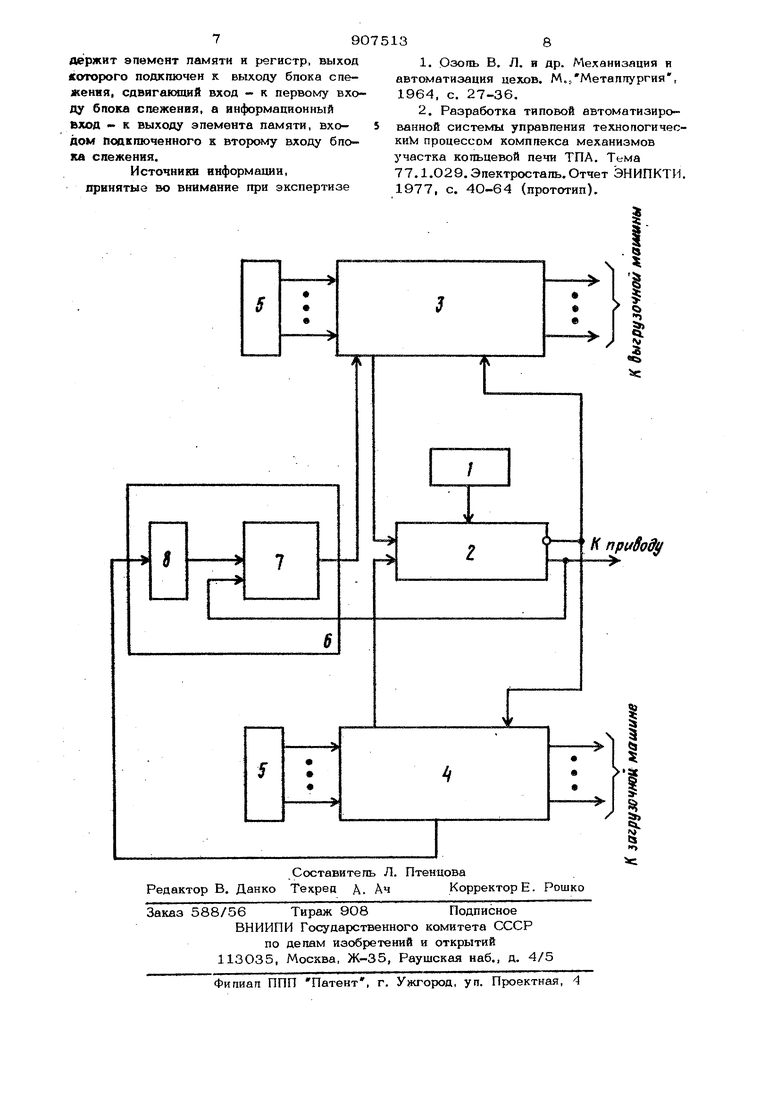
что в известную систему, содержащую кинематически связанный с подом печи датчик импугтьсов, подключенный к первому входу блока управления, второй и третий входы которого соединены соответственно с первыми выходами бпока формирования команд на загрузку и бпока формирования команд на выгрузку, первые входы которых подключены к инверсному выхо- Ю ;кая ду блока управления, а вторые входы к датчикам положения соответствующих испоннительных механизмов, причем прямой выход блока управления соединен с приводом пода печи, введен блок слеже НИН, первый вход которого соединен с Приводом прямым выходом блока управления, второй вход - со вторым выходом блока формирования команд на загруз1су, а выход - с третьим входом блока формирования команд на выгрузку. При этом блок спежения содержит элемент памяти и регистр, выход которого подключен к выходу блока слежения, сдвигающий вход к первому входу блока слежения, а инфор мационный вход - к выходу элемента па мяти, входом подключенного к второму входу бпока слежения. На чертеже приведена функциональная схема предлагаемой системы. Система содержит связанный с подом печи датчик 1 импульсов, блок 2 управ пения и блоки 3 и 4 формирования коман соответственно на выгрузку и загруз1 у, связанные с соответствующими группами датчиков 5 положения исполнительных механизмов загрузки (выгрузки) инверсным выходом блока 2 управления. Между входом блока 3 формирования команд на выгрузку и выходом блока 2 управлеВИЯ включен блок 6 спежения. При реализации системы с однорядово загрузкой печи блоки 2, 3, 4 и 6 выпол нены спедукяцим образом. Блок 2 управления представляет собо счетчик импульсов и схему логического управления приводом пода с элементом памяти на выходе. Счетчик осуществляет подсчет ймпуш сов с датчика 1, соответствующих эпементарному углу перемещения пода. На выхода счетчика включен дещифратор, на строенный, на число импульсов, равное сумме элементарных углов, соответству ющей углу поворота пода на один щаг. Сигнал с прямого выхода элемента памяти управляет вкточением двигателя пода, а задний фронт этого сигнала -
Сигналы с его инверсного выхода явпяются разрешаюшими на начало цикпов загрузки и выгрузки. Сигнал на включение двигателя логическая схема выдает при в ней сигналов об окончании циклов загрузки и выгрузки (с соответствующих выходов блоков 3 и 4). Сигнал на обнуление элемента памяти логичестем,сдвигом информации в регистре блока 6. 9075.134 схема формирует по импульсу дешифратора в момент отработки поворота по- да на один шаг. По этому же импульсу обнуляется и счетчик импульсов блока. Блоки 3 и 4 формирования команд на выгрузку и загрузку представляют собой схемы логического управления, выполненные на интегральных микросхемах серии К 155. Управление исполнительными механизмами (зажимом и отпусканием клещей, подъемом и опусканием хобота загрузочной (выгрузочной) машины, открытием и закрытием выгрузочно-заг эузочных окон. перемещением тележек до соответствуюшего ряда и в исходное положение) осуществляется по сигналам с датчиков 5 положения соответствующих механизмов в соответствии с псх;ледовательностью технологических операций циклов загрузки и выгрузки, что обеспечивается построением логических схем узлов управления (движением клещей, хобота, тележки), входящих в состав блоков 3 и 4. Команды на загрузку формируются в схеме управленияблока 4 по разрешающему сигналу с инверсного выхода блока 2 управления в момент отработки поворота пода и остановки егчэ на очередной оси загрузки. По окончании загрузки - после открытия клешей в печи по сигналу с соответствующего датчика 5, блок 4 формирует сигнал на информационный вход блока 6 слежения. После укладки на поду последнего слитка в данном цикле после возврати тележки в исходное положение сформируется сигнал на втором сигнальном выходе блока 4, разрешающий движение пода (на один из управляющих входов блока 2). Логическая схема управления блока 3 формирования команд на выгрузку проводит цикл выгрузки при наличии двух сигналов: сигнала о наличии слитка на оси выгрузки с выхода блока 6 слежения и разрешающего сигнала с инверсного выхода блока 2 при остановке пода печи после поворота его на очередной шаг. Сигнал об окончании цикла выгрузки в блок 5 2 улравпения о диижении подаШ печи фо мируется логической схемой поспе возврата топожки в исходное положение по окончании выгрузки поспеднего спитка ипи при отсутствии спитков на оси выгрузки при повороте пода на очередной шаг. Бпок 6 спржения содержит (в спучае однорядовой загрузки) регистр 7, выход которого соединяется с одним из входов бпока 3, сдвигающий вход - с выходом блока 2, а информационный вход через элемент 8 памяти - с соответствующим сигнальным выходом бпока 4. В общем спучае количество регистров 7 и элемен тов 8 памяти равно количеству рядов за грузки. Регистр 7 имеет количество разрядов, равное количеству шагов, соответст вующих перемещению слитков от загру- зочного до выгрузочного радиуса. Световая индикация каждого разряда регистра дает визуальное представление о положении и количестве слитков в печи. В блок 6 может быть введен дополни тельный регистр слежения за границей раздела сортаментов слитков. Сдвиг этого регистра осуществляется синхронно со сдвигом основных рюгистров, а входны разряды связаны с цеховыми информацио ными устройствами, ведущими учет сортаментов в общем технологическом цикле iuexa. Предлагаемая система работает следующим образом. После загрузки каждого слитка из блока 4 формирования команд на загрузку выдается сигнал на входной элемент 8 памяти бпока 6, который и запоминает поступающую информацию о загрузке. После нагрева спитка (при наличии сигналов из бпока 2 управления) блок 3 по сигналу с прследнего разряда регистра 7 о наличии слитка перед выгрузочным окном формирует команды на выгрузку - начинает цикл выгрузки, Поспе окончания цикла выгрузки (по сигналу с выхода своего узла управления перемеще ния тележки) блок 3 выдает сигнап на управляющий вход блока 2 управления. При отсутствии на оси выгрузки (после поворота пода на один щаг) слитка посту пает соответствующий сигнап с выходного разряда регистра 7, блок 3 формирует только сигнал на поворот пода без пр ведения цикла выгрузки. При наличии на обоих управпяюших Bxohax блока 2 управления сигналов (об окончании циклов загрузки и выгрузки с 136 соответствующих выходов блоков 3 и 4) с его прямого выхода выдается команда на привод пода печи и одновременно на сдвигающий вход регистра 7. При зтом в первый разряд регистра 7 (по заднему фронту сигнала) записывается информация о загрузке слитка из элемента 8 памя- и, сдвигается информация всех разрядов и в последний разряд переписыврется информация из предпоспеднего разряда регистра 7, а на соответствующий управляющий вход бпока 3 формирования команд на выгрузку поступает очередной сигнал о наличии (ипи отсутствии) горед 1 Ь1грузочным окном спитка. Далее работа продолжается в аналогичной последовательности. Использование предлагаемой системы позволит высвободить часть обспуживак щего персонала за счет исключения визуального контрюля .за распопожением слитков в печи и ручного вмешательства в процесс разгрузки и обеспечит бопее эф,ктивную работу механизмов на участке трубопрокатного агрегата, т.е. в конечном итоге (за счет бопее четкой, организации производства при полной автоматизации технологического комплекса) поылсится качество нагрева и производатепь- ность кольцевых печей. Формула изобретения 1. Система управления механизмами . участка кольцевой нагревательной печи, содержащая кинематически связанный с подом печи датчик импульсов, подключенный к первому входу блока управления, второй и третий входы которого соединены соответственно с первыми выходами блока формирования команд на загрузку и блока формирования команд на млгруз- ку, первые входы которых подключены к (инверсному выходу блока управления, а iBTopbie входы- к датчикам положения соответствующих исполнительных механизмов, причем прямой выход блока управления соединен с приводом пода печи, о т ли чающаяся тем, что, с целью снижения трудоемкости управления и повышения экономичности печи, она содержит блок слежения, первый вход которого соединен с приводом прямым выходом блока управления, второй вход - со втоpi iM выходом блока формирювания команд на загрузку, а выход - с третьим входом блока формирования команд на выгрузку. 2. Система по п. 1, отличающая с я тем, что блок слежения со
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления механизмами участка кольцевой нагревательной печи | 1986 |
|
SU1357922A1 |
| Система слежения за перемещением заготовок в кольцевой печи | 1988 |
|
SU1578219A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1982 |
|
SU1062487A1 |
| Устройство для управления приводом пода кольцевой печи | 1977 |
|
SU723519A1 |
| Способ управления загрузкой, выгрузкой и перемещением заготовок в кольцевой печи | 1989 |
|
SU1696826A1 |
| Устройство для управления загрузкой и перемещением заготовок в нагревательной печи | 1982 |
|
SU1054651A1 |
| Устройство для контроля параметров садки в методической кольцевой печи | 1985 |
|
SU1310604A1 |
| Устройство для управления загрузкой, выгрузкой и перемещением заготовок в кольцевой печи | 1989 |
|
SU1721420A1 |
| Устройство для обучения | 1987 |
|
SU1559366A1 |
| Устройство для подрезки выводов микросхем | 1985 |
|
SU1307616A1 |
