(5) КОНТАКТНОЕ УСТРОЙСТВО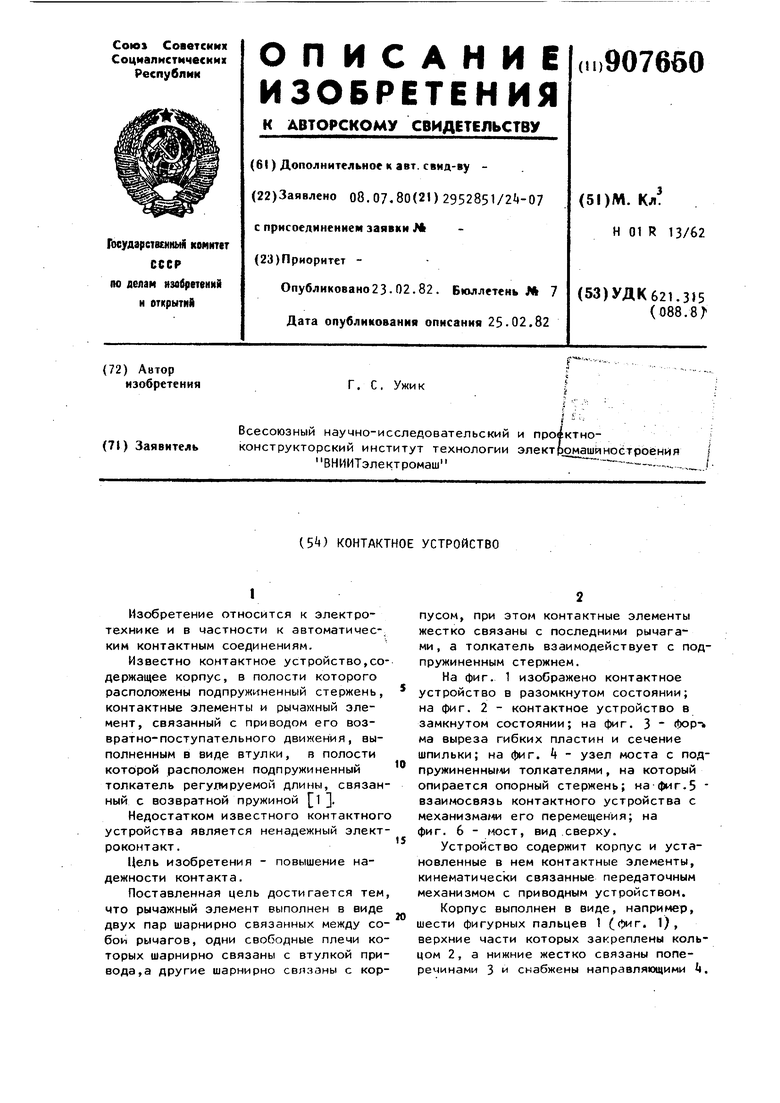
| название | год | авторы | номер документа |
|---|---|---|---|
| Контактное устройство | 1980 |
|
SU970740A1 |
| Устройство для загрузки тележечного конвейера | 1976 |
|
SU659479A1 |
| Устройство для подачи штамповок | 1987 |
|
SU1473895A1 |
| Устройство для вытрамбовывания котлованов | 1980 |
|
SU998639A1 |
| УНИВЕРСАЛЬНЫЙ НАПОЛЬНЫЙ БЫТОВОЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК | 1992 |
|
RU2030989C1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| ГИДРАВЛИЧЕСКИЙ ОТКЛОНИТЕЛЬ | 2008 |
|
RU2361056C1 |
| УСТРОЙСТВО ДЛЯ СБОРКИ ЭЛЕКТРОЛИТИЧЕСКИХ КОНДЕНСАТОРОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 1973 |
|
SU369640A1 |
| Грейферное устройство для подачи заготовок в пресс | 1985 |
|
SU1260083A1 |
| Скважинное фиксирующее устройство | 1982 |
|
SU1035208A1 |
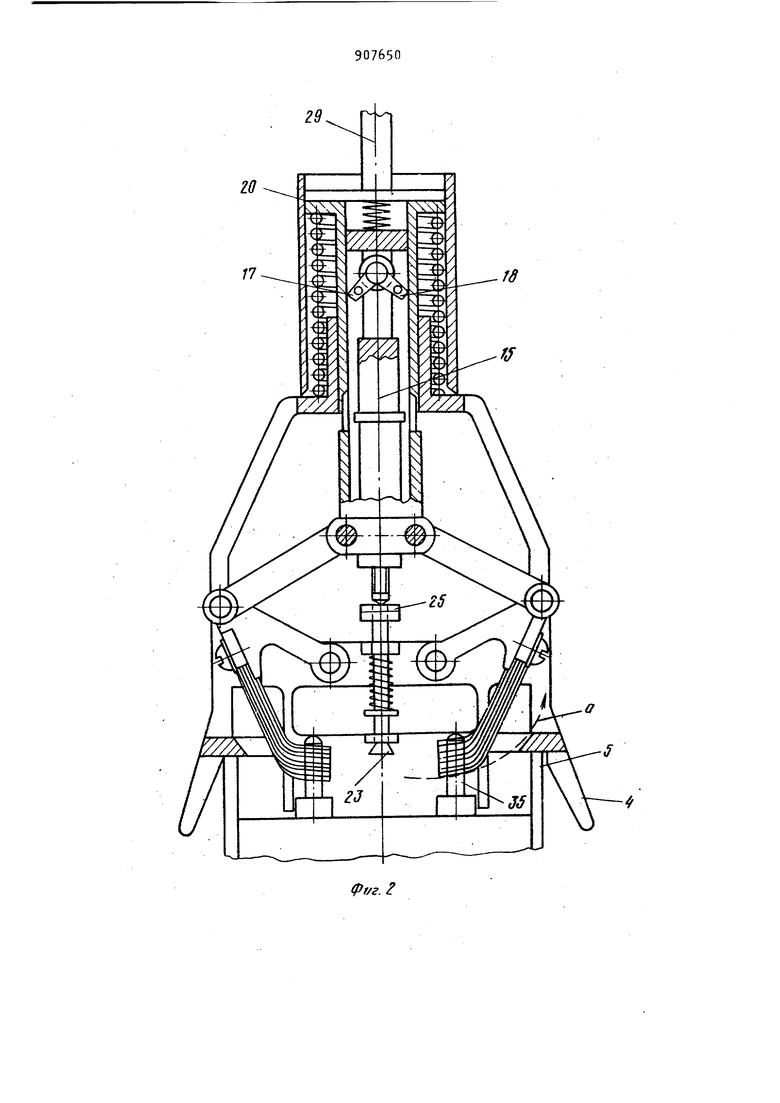
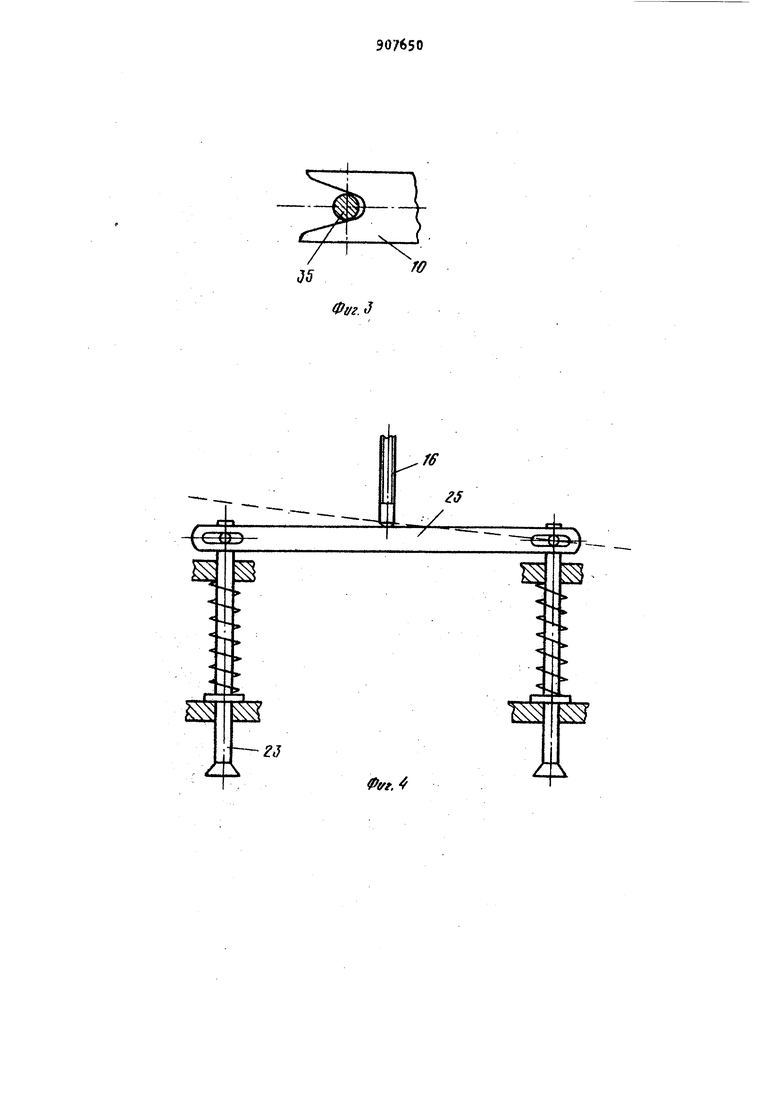
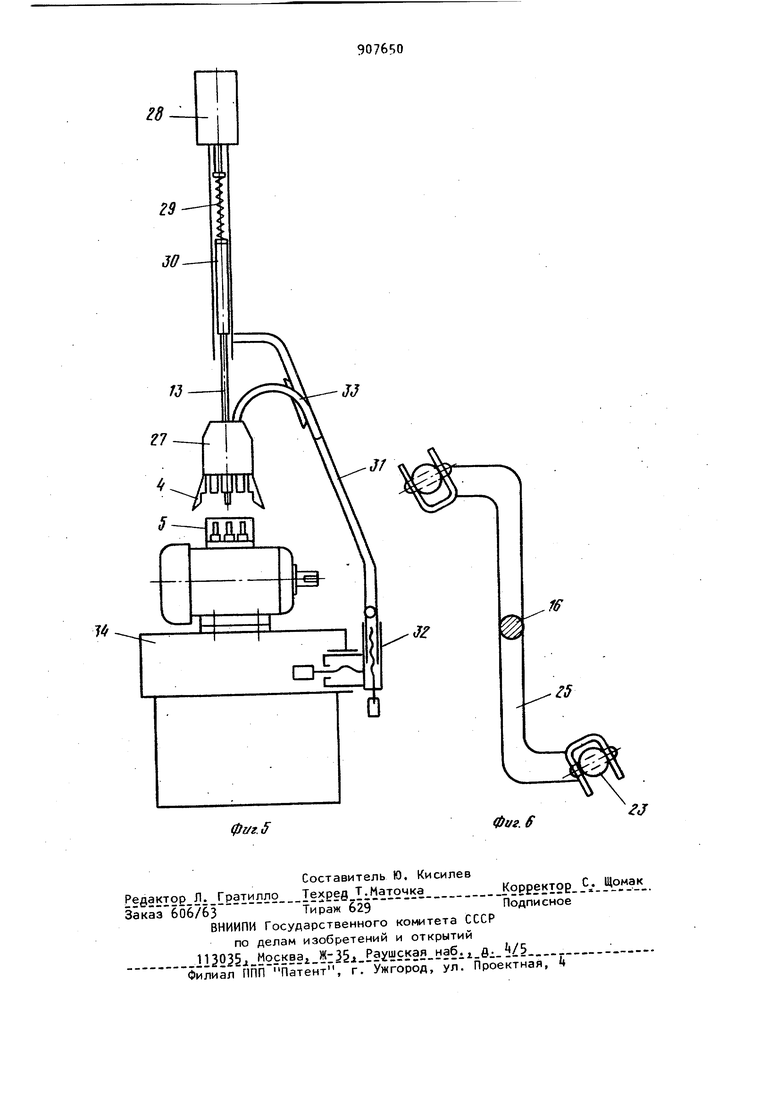
Изобретение относится к электротехнике и в частности к автоматичесКИМ контактным соединениям. Известно контактное устройство,содержащее корпус, в полости которого расположены подпружиненный стержень, контактные элементы и элемент, связанный с приводом его возвратно-поступательного движения, выполненным в виде втулки, в полости которой расположен подпружиненный толкатель регулируемой длины, связанный с возвратной пружиной 1 . Недостатком известного контактного устройства является ненадежный электроконтакт. Цель изобретения - повышение надежности контакта. Поставленная цель достигается тем, что рычажный элемент выполнен в виде двух пар шарнирно связанных между собой рычагов, одни свободные плечи которых шарнирно связаны с втулкой привода,а другие шарнирно связаны с корпусом, при этом контактные элементы жестко связаны с последними рычагами, а толкатель взаимодействует с подпружиненным стержнем. На фиг. 1 изображено контактное устройство в разомкнутом состоянии; на фиг. 2 - контактное устройство в замкнутом состоянии; на фиг. 3 Фор- ма выреза гибких пластин и сечение шпильки; на фиг. k - узел моста с подпружиненныгли толкателями, на который опирается опорный стержень; на фиг.5 взаимосвязь контактного устройства с механизма/1и его перемещения; на фиг. 6 - мост, вид сверху. Устройство содержит корпус и установленные в нем контактные элементы, кинематически связанные передаточным механизмом с приводным устройством. Корпус выполнен в виде, например, шести фигурных пальцев 1 (фиг. 1), верхние части которых закреплены кольцом 2, а нижние жестко связаны поперечинами 3 и снабжены направляющими 4. для обеспечения охвата пальцами кор ки S выводов Сфиг. 2). На поперечинах 3 (фиг, 1) с помо щью шарниров 6 закреплены рычажные элементы5 состоящие из рычагов 7 и рычагов 8. К рычагам 7 прикреплены контактные элементы 9, состоящие из набора гибких пластин 10, нижние ко цы которых загнуты и расположены с зазором по отношению друг к другу, и имеют клиновидные с закругленной вершиной вырезы (фиг. 3 глубина которых тем больше, чем выше распол жена пластина. Рычаги 8 шарнирно связаны с втул кой 11. На втулке 11 навинчен регули руемый упор 12, а к упору прикреп- , лен гибкий элемент 13, связанный с приводом. Между фланцем втулки 2 и втулкой 11 находится распорная пружина 14. Подпружиненный толкатель 15 расположен внутри втулки. На конце толкателя 15 имеется регулируемый опорный стержень 16, а вверху два шарнир ных упора 17 и 18, разворачиваемых вверх пружиной 19. Концы шарнирных упоров 17 и 18 через прорези во втул ке 11 выходят наружу. Толкатель 15 опирается в стакан посредством фланца 20. Во втулке 11 находится распор ная пружина.21, взаимодействующая . с толкателем 15В направляющих втулках 22, прикрепленных к передней и задней поперечинам 3, установлены два подпру иненных стержня 23 удерживаемых в нижнем положении пружинами 2, Вверху стержни 23 шарнирно соединяются мостом 25, на который может опираться регулируемый опорный стержень 16 (фиг, i|). Крепление токоподводящих гибких проводов к контактным элементам 9 осуществляется винтами 26. Для обеспечения работы контактного устройства 27 (фиг. 5} имеется привод 28, обеспечивающий его верти кальное перемещение, например пневматический цилиндр. Контактное устройство 27 с приводом 28 соединяется посредством предварительно сжатой пружины 29, направляющей 30 и гибко го элемента 13Привод 28 установлен на кронштей не 31 для его перемещения в трех плоскостях относительно коробки выводов 5 предусмотрены сервоприводы Подвод питания к контактному устройству осуществляется гибкими проводами 33- Испытуемый электродвигатель подается наместо испытаний шаговым конвейером 3. Устройство работает следующим образом. После поступления электродвигателя на место испытаний включается привод 28, который спускает контактное устройство 27 на коробку 5 выводов. Направляющие t пальцев 1 (фиг, 1 охватывают корпус коробки 5 выводов фиг, 5) и центрируют контактное устройство 27 относительно коробки 5 выводов. Этому также способствует то, что контактное устройство 27 связано с направляющей 30 привода 28 гибким элементом 13- . Усилие от гибкого элемента 13 передается втулке 11 и через предварительно сжатую распорную пружину k кольцу 2, Происходит опускание корпуса контактного устройства к корпусу коробки выводов. Сила предварительного сжатия распорной пружины 1 f превышает силу сопротивления, которую могут встретить направляющие пальцев 1 во время скольжения по корпусу коробки 5 выводов при нормальнь.. словиях посадки контактного устройства 27 на коробку 5 выводов. Когда подпружиненные толкатели 23 войдут в соприкосновение со стенками коробки 5 выводов, они поднимут мост 25 (фиг. 2), а он через регулируемый опорный стержень 16 поднимет толкатель 16, в результате чего шарнирные упоры 17 и 18 втянутся в цилиндрическую втулку 11, т.е, завершится посадка корпуса контактного устройства на корпус коробки выводов. После посадки распорная пружина 21 будет сжиматься, а цилиндрическая втулка 11 опускаться вниз. При опускании цилиндрической втулки 11 рычаги 7, толкаемые рычагами 8, будут поворачиваться, производя перемещение контактных элементов 9 к шпилькам коробки 5 выводоВ (траектория движения а конца контактного элемента 9 показана на фиг. 2), при этом шпильки 35 коробки выводов заходят в клиновидные прорези контактных элементов. В контакт со шпилькой гибкие пластины 10 входят последовательно, первой - самая .нижняя и последней - самая верхняя.
Сила нужного контактного давления (между шпильками и контактными элементами 9) устанавливается с помощью регулируемого упора 12. Он «е предохраняет контактные элементы 9 от поломки. Когда упор 12 упрется во втулку 2 корпуса сжимается пружина 29, сила предварительного сжатия которой больше силы, необходимой для обеспечения нужного контактного давления.
После замыкания контактных элементов пускатель включает напряжение и ток по гибким проводам 33, прикрепленным с помощью наконечников и винтов 26 к контактным элементам 9, подается к электродвигателю.
После завер1чения испытаний пускатель отключает напряжение, включается привод 28 на подъем контактного устройства 27. При подъеме вверх гибкого элемента 13 под действием раз|жимающейся распорной пружины I под нимается втулка 11. Контактные элементы 9 расходятся и после полного разжатия распорной пружины 14 начинается подъем контактного устройства 27. При этом толкатель 15, ас ним и шарнирные упоры 17 и 18 под действием распорной пружины 21 возвр щаются в исходное положение.
Если испытуемый электродвигатель, вследствие неисправности конвейера, окажется смещенным по ходу конвейера на большую величину так, что направляющие k не захватят коробку выводов 5, а упрутся в нее или в корпус электродвигателя, то при опускании контактного устройства 27 на коробку 5 выводов оба толкателя 23 не упрутся в стенки коробки 5 выводов и с помощью -моста 25 (фиг. ) не под- . нимут толкатель 15- Следовательно, шарнирные упоры 17 и 18 не будут втянуты во внутрь цилиндрического стакана 11, при этом усилие от привода 28 будет передаваться цилиндрическому толкателю 11 и через шарнирные упоры 17 и 18 корпусу контактного устройства. Контактные элементы останутся неподвижными и таким образом будут предохранены от поломки, а под действием привода 28 сожмется только предохранительная пружина 29Если испытуемые электродвигатели, вследствие неисправности конвейера, могут смещаться не только вдоль движения конвейера, айв поперечном, направлении, то толкатели 2 устанавливаются по углам контактного устройства, а мостик выполняется фигурным (фиг. 6.
Контактное устройство снижает трудозатраты, повышает культуру производства, снижает стоимость контрольно-испытательного оборудования.
Формула изобретения
Контактное устройство, содержащее корпус, в полости которого расположены подпружиненный стержень, контактные элементы и рычажный элемент, связанный с приводом его возвратно-поступательного перемещения, выполненный в виде втулки, в полости которой расположен подпружиненный толкатель регулируемой длины, связанный с возвратной пружиной, отличающееся тем, что, с целью повышения надежности контакта, рычажный элемент выполнен в виде двух пар шарнирио связанных между собой рычагов, одни свободные плечи которых шарнирно связаны с втулкой привода, а другие шарнирно связаны с корпусом,при i этом контактные элементы хестко связаны с последними рычагами, а толкатель взаимодействует с подпружиненным стержнем.
Источники информации, принятые во внимание при экспертизе
п
Z6
w
/
29
Г8
fj
(pvz. /
J5
Фог.
ГО
овг5
/
-оэ-)
/
гд
Щ
Ж
0fff.4
29 30
