(54) АВТООПЕРАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1988 |
|
SU1615130A1 |
| ВСЕСОЮЗНАЯ Iпл:п:^;о-т[лг;;г;[-ндя'j^j^xmiir"— "^ Г^ П Г .! ^"У •• — • .- лL.-: .L-fv It i^^ i ;^i Ij--^ | 1971 |
|
SU300294A1 |
| Захватное устройство | 1986 |
|
SU1400876A1 |
| Устройство для шаговой подачи стопы заготовок | 1984 |
|
SU1194544A1 |
| ГИДРОПУЛЬСАЦИОННЫЙ ПРЕСС | 1991 |
|
RU2010658C1 |
| АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1991 |
|
RU2022752C1 |
| Импульсный податчик бурового инструмента | 2015 |
|
RU2620657C1 |
| Устройство для автоматической заправки нити на мотальной машине | 1981 |
|
SU1006352A1 |
| Вакуумный захватный орган | 1980 |
|
SU946743A1 |
| МАШИНА ДЛЯ ПРОБИВАНИЯ ОТВЕРСТИЙ В МЕТАЛЛУРГИЧЕСКИХ ПЕЧАХ ПРИ ВЫПУСКЕ МЕТАЛЛА | 1926 |
|
SU9879A1 |
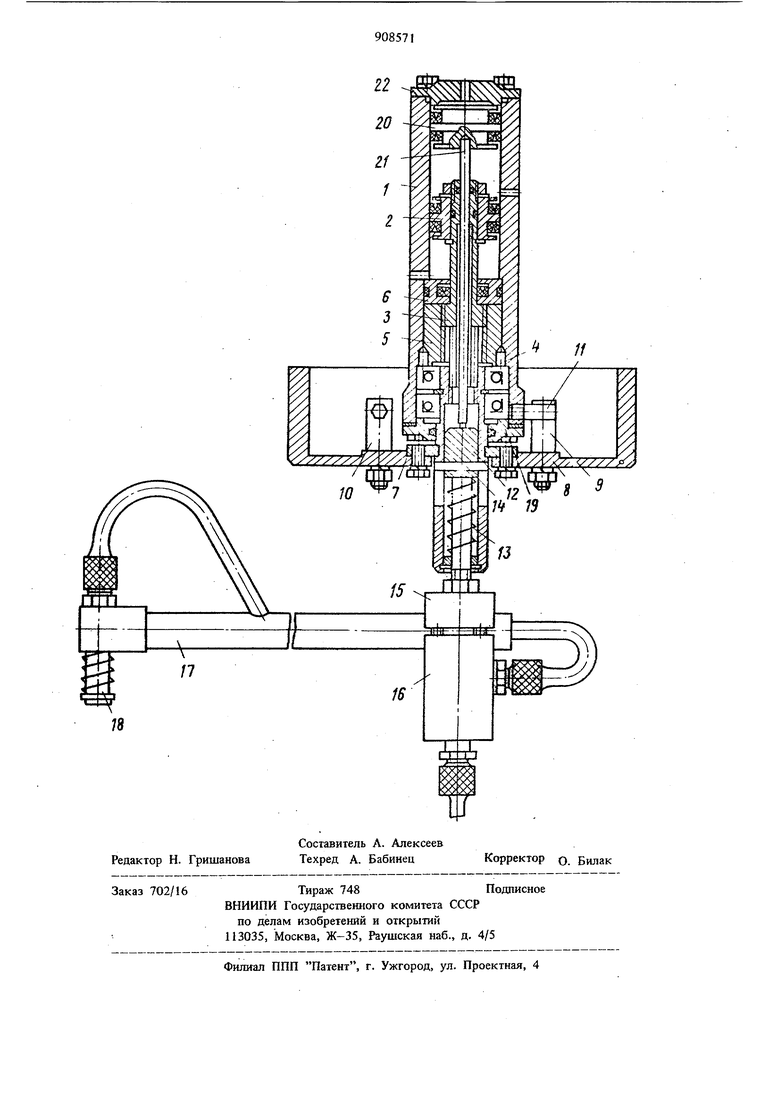
Изобретение относится к машиностроению, а именно к автооператорам для переноски деталей. Известен автгюператор, включающий исполнительный орган, приводы, например в виде телескопического силового цилиндра 1. Недостаток известного автооператора - сложность конструкции Н низкая надежность Цель изоб|5етения - устранение указанного недостатка, т.е, повышение надежности и упрошение конструкции. Поставпениая цель достигается тем, что автооператор снабжен винтовой парой с пол винтом, толкателем и стержнем, связанным с исполнительным органом, причем один из поршней телескопического силового цилиндр связан с винтом винтовой пары и в этом порите выполнено отверсгае, а толкатель размещен в этом отаерстин и в полости ви та -связан со вторым поршнем телескопического силового цилиндра я со стержнем, с которым также Лязана гайка винтовой пары На чертеже изображен автооператор. Автооператор состоит из корпуса 1, телескопического цилиндра, который может быть закреплен посредством кронштейнов на прессующем автомате. В верхней части корпуса телескопического цилиндра размешены два поршня. Соединенный с поршнем 2 вращательного перемещения шток 3 имеет в нижней части йолый винт и взаимодействует с поворотной гайкой 4, смонтированной в нижней части корпуса I. Для предотвращения от проворота поршня 2 со штоком 3 может быть применено, например, шлицевое , роль которого выполняет средняя одеть штока 3 и шлицевая втулка 5, закрепленная в расточке корпуса 1. Кольцо 6 служит для уплотнения штока 3. К средней части поворотной гайки 4 посредством полуколец 7 крепится барабан 8 для размещения кулачков, управляющих работой автооператора путем воздействия на конечные выключатели и пневмозолотники, а также упоры 9 и Ш, ограничивающие движение поворота тайки 4 при взаимодействии со стержнем П, закрепленным на корпусе 1 цилиндра. В нижней части поворотной гайки 4 размещен стержень 12, поджатый пружиной 13. Стержень 12 имеет штифт 14, взаимодействующий с пазами поворотной гайки 4 и позволяющий перемещаться стержню поступательного вниз относнтельно гайки 4.
К стержню 12 посредством колодок 15 и 16 крепится рычаг 17 с вакуумной присоской 18. Нижняя часть корпуса цилиндра 1 закрыта фланцем 19. В верхней части , корпуса телескопического цилиндра 1 размещен плавающий поршень 20, который посредством толкателя 21 может опускать подпружиненный стержень 12 с рычагом 17. Верхняя часть корпуса 1 закрыта крышкой 22. Автооператор работает следующим образом
В исход ом положении пор(шш 2 и 20 находятся в верхних положе1шях (нижний поршень 2 под действием сжатого воз,чуха, а поршень 20 под, действием пружины 13). При верхнем расположении поршней рычаг
17с присоской 18 находятся над приемной плитой для спека1шя. После переключения пневмозолотника, управляющего поршнем 2, импульсом, исходящим от прессующего автомата, сжатый воздух подается сверху на поршень 2, заставляя его перемещаться со штоком 3 и вращать поворотную гайку 4
.со стерж)ем 12, поджатым пружиной 13 и несушим рь1чаг 17 с ваку мной присоской
18до взаимодействия упора 9 со стержнем П. Присоска 18 рычага 17 в этот момент находится над спрессованным изделием.
После переключения пневмозолотника, управляющего поршнем 20, сжатый подается сверху на поршень 20, заставляя его двигаться вниз и воздействовать на толкатель 21 и стержень 12, преодолевая лротиводавление пружины 13. Присоска 18 соприкасается с изделием и, при включенной вакуумной сети происходит захват изделия. Затем давление над поршнем 20 сбрасывается и под действием пр-ужины 13 происходит подъем стержня 12 с рычагом 17 и присос085714
кой 18, а также поршня 20. После чего сжатый воздух подается под поршень 2, заставляя его перемещаться вверх со щтоком 3 и вращать поворотную гайку 4 со J стержнем 12 и рычагом 17. Таким образом, происходит перенос захваченного присоской изделия на приемную плиту для спекания изделий. Затем переключается пневмозолотник, управляющий поршнем 20,
,д и сжатый воздух подается сверху на поршень 20. Происходит опускание изделия на приемную плиту для спека1шя. Затем давление над поршнем 20 сбрасывается и рычаг 17 с присоской 18, стержнем 12, а также
JJ поршень 20 под действием пружины 13 поднимаются.
Автооператор готов к следующему циклу. Предложенное устройство позволяет значительно упростить конструкцию, а также повышает надежность и производительность автооператора.
Формула изобретення
Автооператор, включающий исполнительный орган, приводы, например, в виде телескеттического силового аилиндра, отличающийся тем, что, с целью упрощения конструкции и повьш1ения надежности, он снабжен винтовой парой с полым винтом, толкателем и стержнем, связанным с исполнительным органом, причем один из поршней телескопического силового цилищфа связан с винтом винтовой пары и в этом поршне выполнено отверстие, а толкатель размещен в этом отверстии и в полости винта и связан со вторым поршнем телескопического сялового цилиндра и со стержнем, с которым также связана гайка винтовой пары.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР N 300295, кл. В 23 Q 7/04, 1969.
