Известны автооператоры для захвата и переноса деталей, снабженные захватными рычагами, управляемыми через копирное устройство силовым цилиндром.
Описываемый автооператор отличается от известных тем, что механизм захвата выполнен шарнирно-рычажным с приводом от пружины.
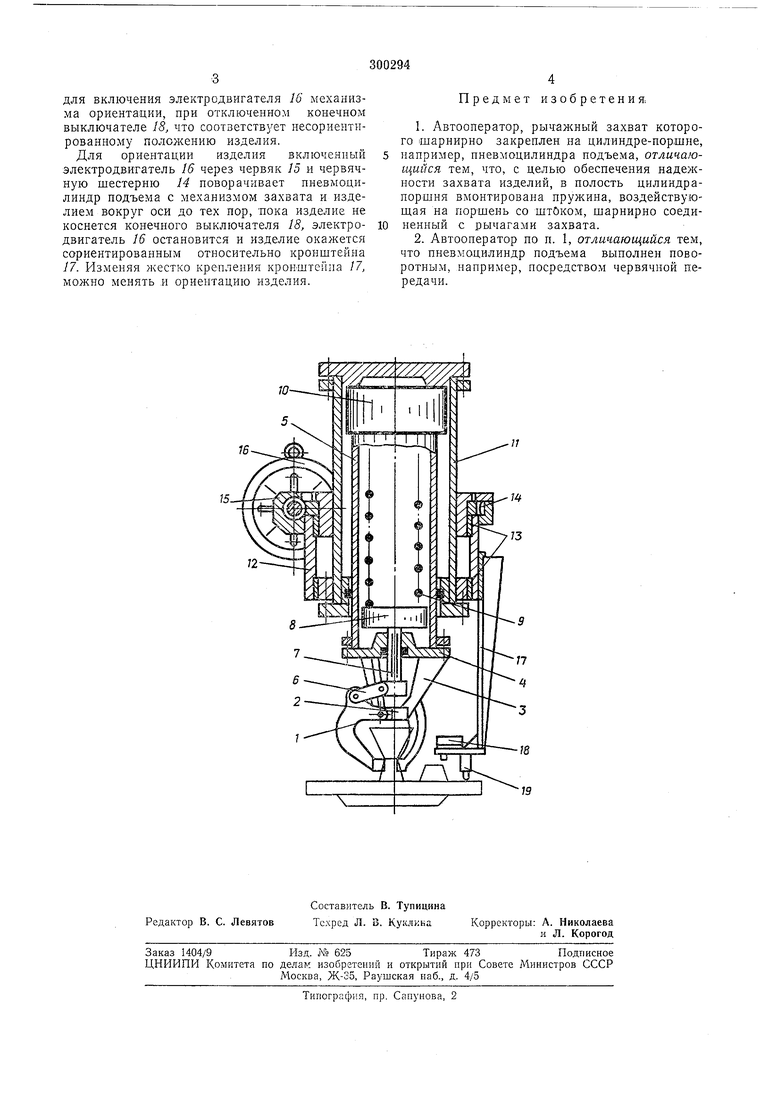
На чертеже схематично показан автооператор.
Автооператор состоит из механизма захвата, пневмоцилиндра подъема и механизма ориентации.
Рычаги 1 механизма захвата шарнирно закреплены на крышке 2, которая посредстBOM кронштейнов 3 жестко присоединена к фланцу 4 цилиндра-поршня 5. Рычаги с помощью сергг 6 соединены со штоком 7, поршень 8 которого находится под действием усилия пружины сжатия 9, упирающейся с другой стороны в поршень 10 пневмоцилиндра подъема.
Пневмоцилиндр подъема состоит из корпуса 11 цилиндра-поршня 5 и порщня 10 и смонтирован в корпусе 12 механизма ориентации при помощи подшипников скольжения 13, на пневмоцилиндре подъема жестко закреплена червячная шестерня 14, входящая в зацепление с червяком 15. Червяк 15 смонтирован в корцусе 12 и жестко связан с валом злектродвигателя 16, который также закреплен на корпусе 12. На корпусе 12 закреплен, кроме того, кронштейн 17 с конечными выключателями 18 и 19. Одновременно корпус 12 используется для монтажа манипулятора на каком-либо устройстве.
Автооператор работает следующим образом.
В исходном положении поршни 5 и 10 находятся в верхних положениях лод действием сжатого воздуха, что соответствует верхнему положению механизма захвата с раскрытыми рычагами /. После переключения пневмозолотника, управляющего пневмоцилиндром подъема, на опускание поршень 10 с механизмом захвата опускается .вниз. Затем переключением другого пневмозолотника, управляющего поршнем 8, прекращается подача сжатого воздуха в штоковую полость поршня 8, который при этом под действием пружины сжатия 9 опускается вниз и посредством штока 7 и серег 6 поворачивает рычаги / на захват изделия. После захвата изделия нневмозолотник, управляющий пневмоцилиндром подъема, переключается на подъем. При этом порщень JO с механизмом захвата и изделием поднимается вверх. Поднятое вверх изделие включает конечный выключатель 19, который служит для автоматического контроля наличия изделия в поднятом механизме захвата и
для включения электродвигателя 16 механизма ориентации, при отключенном конечном выключателе /5, что соответствует несориентированному положению изделия.
Для ориентации изделия включенный электродвигатель 16 через червяк 15 и червячную шестерню 14 новорачивает пневмоцилиндр подъема с механизмом захвата и изделием вокруг оси до тех пор, пока изделие не коснется конечного выключателя 18, электродвигатель 16 остановится и изделие окажется сориентированным относительно кронштейна 17. Изменяя жестко крепления кронштейна 17, можно менять и ориентацию изделия.
Предмет изобретения.
1.Автооператор, рычал :ный захват которого шарнирно закреплен на цилиндре-поршне, например, нневмоцилиндра подъема, отличающийся тем, что, с целью обеспечения надежности захвата изделий, в полость цилиндрапоршня вмонтирована пружина, воздействующая на поршень со штОком, шарнирно соединенный с рычагами захвата.
2.Автооператор по п. 1, отличающийся тем, что пневмоцилиндр подъема выполнен поворотным, например, посредством червячной передачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1980 |
|
SU908571A1 |
| Устройство для установки труб в трубные решетки теплообменников | 1983 |
|
SU1186452A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЗАГОТОВОК | 1994 |
|
RU2105653C1 |
| Грейферное устройство для подачи заготовок в пресс | 1987 |
|
SU1454551A1 |
| Установка для переработки отходов полимерной пленки в.и.ефимчева | 1977 |
|
SU710819A1 |
| Труборезный автомат | 1982 |
|
SU1055593A1 |
| Автооператор для автоматической линии термообработки | 1976 |
|
SU748113A1 |
| Манипулятор | 1979 |
|
SU785026A1 |
| АВТООПЕРАТОР | 1972 |
|
SU347161A1 |
| Захват манипулятора для ферромагнитных цилиндрических изделий | 1983 |
|
SU1224130A1 |
16
