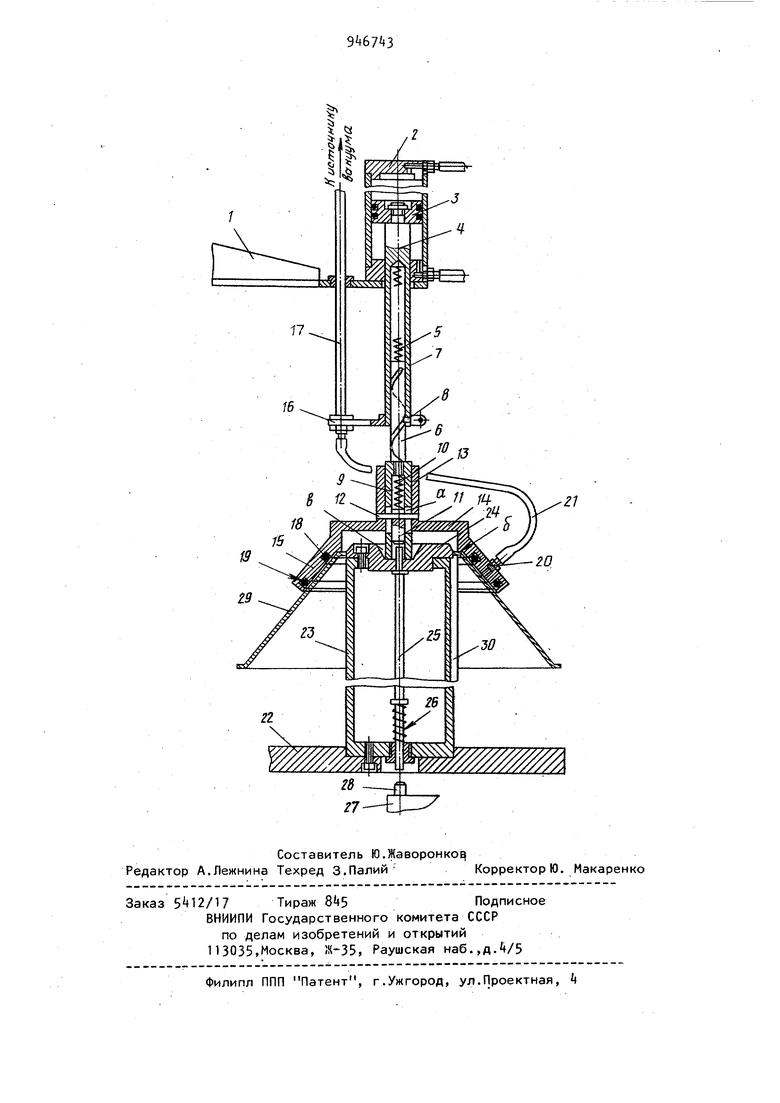
I Изобретение относится к механи(зации и автоматизации штамповочного производства и может быть использовано для ориентации и захвата заготовок при подаче их в рабочую зону обрабатывающей машины. Известен вакуумный захватный орган содержащий полый корпус с присоской, укрепленный в держателе, подвижном в направлении, перпендикулярном поверхности захватываемой заготовки, и расположенный в корпусе подвижный в направлении движения держателя шток, двуплечий рычаг, установленный на оси в держателе с возможностью взаимодействия одним концом с установленным не пути движения держателя неподвижным упором и шарнирно связанным другим концом со штоком, снабженным поршнем, размещенным в выполненной в корпусе для этого цилиндрической полости, соединенной отверстием с полостью присоски, а также пружину, воз действующую на поршень в направлении, обратном направлению движения держателя Li J, Известный вакуумный захватный орган имеет сложную конструкцию и не обеспечивает ориентацию заготовок. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является вакуумный захватный орган, содержащий приводной кронштейн закрепленный на нем вертикально; силовой цилиндр, включающий в себя корпус, установленный в корпусе поршень, несущий полый шток, в котором расположен подпружиненный в вертикальном направлении стержень с винтовым пазом, взаимодействующий со штифтом, закрепленным на штоке. На стержне жестко смонтирована по меньшей мере, одна полая присоска,полость которой через штуцер связана с источником вакуума. Под приводным кронштейном размещена оправка для размещения заготовок с отверстием, включающая в себя корпус с ориентирующим выступом, установленный в корпусе подпружиненный в вертикальном направлении дополнительный стержень, взаимодействующий одним концом со стержнем, а другим концом с датчиком.2 J. Известный вакуумный захватный ор ган не надежен в работе. Цель изобретения - повышение надежности работы вакуумного захватно го органа и расширение номенклатуры перемещаемых заготовок. Поставленная цель достигается те что в вакуумном захватном органе, с держащем приводной кронштейн, закре ленный на нем вертикально силовой цилиндр с полым штоком, несущим штифт, расположенный в полости штока подпружиненный в вертикальном направлении стержень с винтовым пазом, взаимодействующим со штифтом, смонтированную на стержне полую присоску, полость которой связана через штуцер с источником ваку ума, размещенную под приводным крон штейном оправку для размещения заготовок с отверстием, .включающую в себя корпус с ориентирующим высту прм, установленный в корпусе подпружиненный в вертикальном направлении дополнительный стержень, взаимодействующий одним концом со стержнем, а другим концом - с датчиком, присоска смонтирована на стержне с возможностью перемещения вертикальном направлении,подпружинена в этом направлении и снабжена по меньшей мере двумя взаимодейству щими с заготовкой уплотнительными кол.ьцами, концентрично закрепленными на внутренней стороне присоски на расстоянии одно от другого, на внутренней стороне присоски выполне кольцевой быступ взаимодействующий с заготовкой, размещенной на оправке, а штуцер закреплен на присоске между уплотнительными кольцами . На чертеже изображен вакуумный захватный орган, разрез. Вакуумный захватный орган содержит приводной кронштейн 1 держатель закрепленный на нем вертикально сил вой цилиндр 2 с поршнем 3, на котором закреплен полый шток , расположенные в полости штока k пружину 5 и стержень 6. На стержне 6 выполнен винтовой паз 7, в который входит штифт 8, закрепленный в полом штоке . На 4 конце стержня 6 закреплена втулка 9 с продольными пазами а, в полости которой расположены пружина 10 и плунжер 11 со штифтом 12, входящим в пазы а . Штифт 12 закреплен в корпусе (присоске , выполненном в виде втулки 1 3 с фланцем 1i и усеченного конуса 15, меньшее основание которого расположено со стороны фланца И. На штоке смонтирован кронштейн 16, в котором закреплена вертикально труба 17, проходящая через кронштейн 1 (держатель . На внутренней стороне усеченного конуса 15 закреплены два уплотнительных кольца 18 и 19, расположенные на заданном расстоянии одно от другого . В усеченный конус 15 ввернут штуцер 20, соединяющий полость усеченного конуса между уплотнительными кольцами 18 и 19 с трубкой 17 при помощи гибкого шланга 21. На внутренней стороне усеченного конуса 15 выполнен кольцевой выступ б, расположенный над уплотнительными кольцами 18 и 19. Под кронштейном 1 (держателем) установлен стол 22, на котором закреплен стакан 23, закрытый со стороны кронштейна 1 (держателя 7 крышкой 2k, имеющей коническое углубление в стороны кронштейна 1 (держателями отверстие для прохода стержня 25, расположенного в полоЪти стакана 23 и подпружиненного к крышке 2k пружиной 2б. Под столом 22 на основании 27 закреплен датчик 28. Позицией 29 обозначена заготовка, имеющая форму усеченного конуса. На наружной стороне стакана 23 закреплен вертикально (или выполнен за одно целое со стаканом 23) ориентирующий выступ 30. Вакуумный захватный орган работает следующим образом. Включают силовой цилиндр 2. Поршень 3 перемещает шток 4 вниз до взаимодействия заготовки 29 с ориентирующим выступом 30. Крышка 2k входит в отверстие заготовки 29. При дальнейшем перемещении штока k фланец k с втулкой 13 перемещаются относительно втулки 9. Втулка 13 через штифт 12 перемещает плунжер 11, сжимая пружину 10. Затем втулка 9 входит в коническое углубление в и вэёргмодайствует с крышкой 2. При дальнейшем перемещении штока k вниз штифт 8, перемещаясь по винтово пазу 7, поворачивает стержень 6, кото рый одновременно перемещается относи тельно штока k, сжимая пружину 5. Стержень 6 поворачивает втулку 9. Последняя через штифт 12, проходящий через пазы а, поворачивает втулку 13 с фланцем I и усеченным конусом 15. Заготовка 29 прижата к уплотнительным кольцам 18 и 19 за счет разряжени создаваемого источником вакуума, и поворачивается вместе с усеченным ко нусом 15 до совпадения ориентирующего выступа 30 с соответствующим пазом, выполненным в заготовке 29. Заготовка 29 перемещается по стакану 23 вниз, так как втулка 13 от пружины 10 через плунжер 11 и штифт 12перемещается по втулке 9. Втулка 13через фланец перемещает усеченный конус 15 вниз, и он кольцевым выступом б воздействует на заготовку 9. Плунжер 11 воздействует на стержень 25, последний сжимая пружину 26, перемещается вниз и воздействует на датчик 28, который подает сигнал на отключение источника вакуума и на включение силового цилиндра 2 на реверсивное движение. Эффект от исполнения вакуумного захватного органа заключается в повышении надежности его работы и расширения номенклатуры перемещаемых заготовок. Формула изобретения Вакуумный захватный орган, содержащий приводной кронштейн, закрепленный на нем вертикально силовой цилиндр с полым штоком, несущим штифт, расположенный в полости штока под- пружиненный в вертикальном направлении стержень с винтовым пазом, взаимрдействующим со штифтом, смонтированную на стержне полуб присоску, полость которой связана через штуцер с источником вакуума, размещенную под приводным кронштейном оправку для размещения заготовок с отверстием, включающую в себя корпус с ориентирующим выступом, установленный в корпусе подпружиненный в вертикальном направлении дополнительный стержень, взаимодействующий одним концом со стержнем, а другим концом - с датчиком, отличающийся тем, что, с целью повышения надежности работы вакуум - ного захватного органа и расширения номенклатуры перемещаемых заготовок, присоска смонтирована на стержне с возможностью перемещения в вертикальном направлении, подпружинена в этом направлении и снабжена по меньшей мере двумя взаимодействующими с заготовкой уплотнительными кольцами, концентрично закрепленными на внутренней стороне присоски на расстоянии одно от другого, на внутренней стороне присоски выполнен кольцевой выступ, взаимодействующий с заготовкой, размещенной на оправке, а штуцер закреплен на присоске между уплотнительными кольцами. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 3 +2712, кл. В 21 D 3/18, В 30 В 15/30, 11.09.80. 2.Авторское свидетельство СССР № 778876, кл. В 21 D ««З/ОО, 08.12.78 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захватный орган | 1981 |
|
SU1107936A1 |
| Вакуумный захватный орган для плоских заготовок | 1983 |
|
SU1110528A1 |
| Вакуумный захватный орган | 1977 |
|
SU644579A1 |
| Пневматический захватный орган | 1981 |
|
SU988425A1 |
| Устройство для поштучной выдачи плоских заготовок из бункера | 1983 |
|
SU1088850A1 |
| Вакуумный захватный орган | 1981 |
|
SU1005996A1 |
| Вакуумный захватный орган | 1981 |
|
SU1011308A1 |
| Вакуумный захватный орган | 1980 |
|
SU925820A1 |
| Магнитный захватный орган | 1985 |
|
SU1393508A1 |
| Вакуумный захватный орган | 1980 |
|
SU904846A1 |