С54) СПОСОБ НАТЯЖЕНИЯ ЦЕПИ УГОЛЬНОГО СТРУГА И КОНВЕЙЕРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для натяжения цепи угольного струга и конвейера | 1980 |
|
SU911027A1 |
| Устройство автоматического управления системой пылеподавления струговой установки | 1982 |
|
SU1092281A1 |
| Устройство управления процессом депарафинизации труб скребками | 1979 |
|
SU905437A1 |
| Электронное синхронное телеграфное устройство | 1978 |
|
SU860331A2 |
| Лентопротяжный механизм | 1981 |
|
SU964719A1 |
| СПОСОБ УПРАВЛЕНИЯ ОТКРЫВАНИЕМ ДНИЩА КОВША ЭКСКАВАТОРА | 2023 |
|
RU2816132C1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU958217A1 |
| ПРИВОД НАВОЯ ТКАЦКОГО СТАНКА | 1970 |
|
SU287608A1 |
| УСТРОЙСТВО КОНТРОЛЯ МЕСТОНАХОЖДЕНИЯ СТРУГАВ ЛАВЕ | 1972 |
|
SU357344A1 |
| Вытравливающее устройство для гибкой тяги | 1979 |
|
SU870346A2 |
1
Изобретение относится к способам натяжения цепи очистных машин с бесконечным тяговым органом и непрерывного транспорта и может быть использовано в горнорудной и горной промышленности для автоматического натяжения тяговых цепей приводным электродвигателем после их порыва.
Известен способ натяжения тяговой цепи конвейера, включающий следуимцие операции: фиксирование одного конца цепи; выбирание слабины цепи кратковременными включениями электропривода; стопорение редуктора храповым механизмом при достижении определенного усилия натяжения цепи, соответствующего опрокидному моменту гидромуфты I .
К недостаткам этого способа относится то, что операция выбирания слабины цепи характеризуется субъективными факторами; а именно: длительность кратковременных включений электропривода может быть различна;
при слишком коротких включениях момент электродвигателя не преодолевает момент сопротивления нагрузки, при продолжительных включениях двигатель выходит на устойчивый участок механической характеристики, что недопустимо, так как при этом операция . выбирания слабины : цепи производится при большой скорости и механической мощности электродвигателя, что приводит к динамическим ударам в цепи и может приводить к травматизму обслуживающего персонала. Натяжение можно производить только до определенного усилия в цепи, соответствующего опрокидному моменту гидромуфты, Стопорение редуктора храповым механизмом производится при пробуксовке гидромуфты, что также чревато травматизмом обслуживающего персонала.
Известен также способ натяжения цепи струга и конвейера поср :дством импульсного включения приво;1иого
390
электродвигателя, основанный на контроле величины усилия в цепи и отключении электродвигателя при достижении последней заданного значения. Этот способ включает следующие операции: фиксирование одного конца.цепи; стопорение редуктора храповьп механизмом; натяжение цепи коротка..; включением электродвигателя ГзЗ.
Операции натяжения цепи также присущ субъективный фактор, так как при слишком коротких включениях электродвигателя его момент не преодолевает сопротивление нагрузки, при продолжительных включениях электродвигатель выходит на устой.чивый участок механической характеристики, т.е. натяжение производится на высокой скорости при большой механической мощности электродвигателя, что приводит к динамическим ударам в цепи.
Цель изобретения - повышение надежности за счет ограничения механической мощности электродвигателя.
Поставленная цель достигается те что длительность импульсов включенного состояния электродвигателя формируют меньше времени выхода его на устойчивый участок механической характеристики и увеличивают .ее пропорционально усилию натяжения.
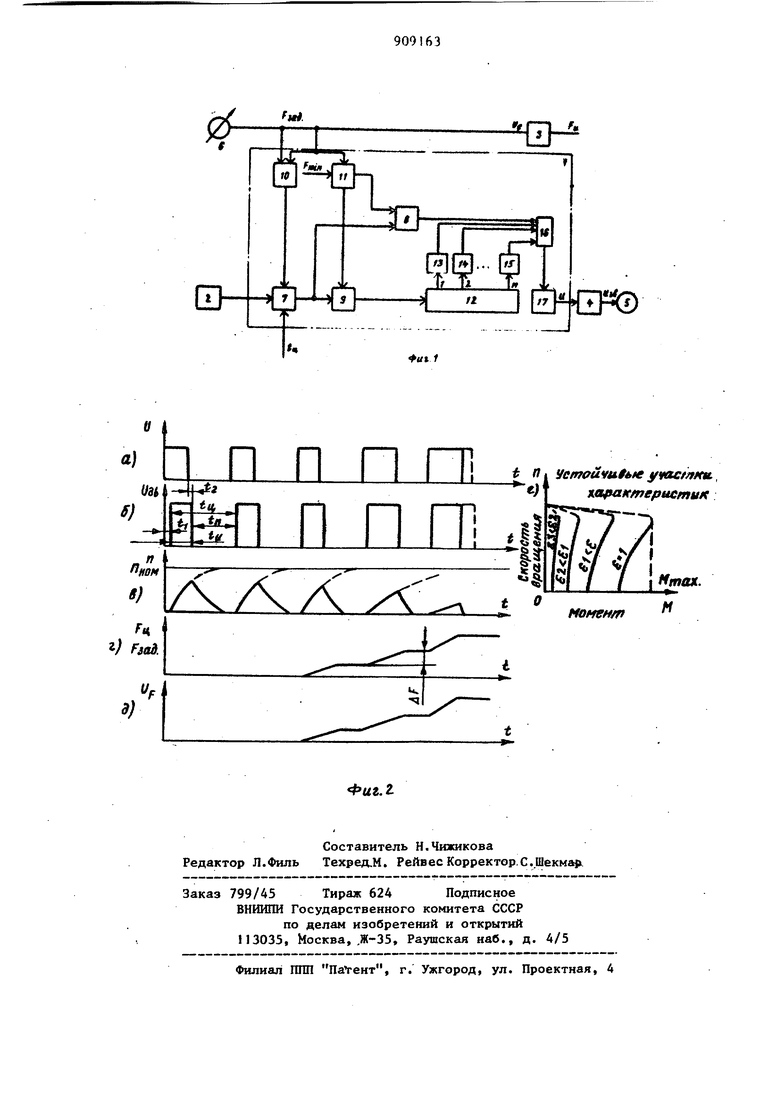
На.фиг.1 изображено устройство, реализующее предлагаемый способ; на фиг,2 - временные диаграммы натяжения цепи.
Устройство для натяжг-ния содержи программный блок I, вход которого соединен с устройством 2 оперативного управления и выходом U« датчика 3 усилий. Выход и программного блока соединен с пуско-стоповой аппаратурой 4, которая, в свою очередь, соединена с двигателем 5, Выход датчика усилий соединен также с показывающим прибором 6. По вход FjQ программного блока задается требуемое усилие натяжения цепи,по входу tu, длительность цикла. Минимальная длительность цикла задается из У.СЛОВИЯ допустимой частоты включения двигателя и пуско-стоповой аппаратуры . где -Ьц-длтельность цикла, f доп допустимая частота включения двигателя и пускостоповой аппаратуры.
Программный блок 1 вырабатывает импульсы постоянной длительности
до тех пор, пока и цепи irr поянится усилие натяжения Рц. После появления усилия натяжения длительность импульсов увеличивается, но не становится больше гфеменй выхода электродвигателя на устойчивый участок механической характеристики. После достижения усилия в цепи, равного заданному, программный блок отключается.
Способ осуществляют следующим образом.
После операции фиксирования одного конца цепи и стопорения редуктора храповым механизмом нажимают кноп . ку запуска устройства 2 оперативного управления. При этом программный блок 1 начинает вырабатывать импульсы и (фиг.2а). Импульсы поступают на пуске-стоповую аппаратуру 4, которая подключает электродвигатель к сети на время -Ьц (фиг. 2), -Ь- - время срабатывания пуско-стоповой аппаратуры; время отключения пускостоповой аппаратуры,
Продолжительность времени -fc у, меньше времени выхода электродвигателя на устойчивый участок механической характеристики(фиг.2е) . Вид механической характеристики электродвигателя зависит от скважности импульсов
-fcvi vi
-Ьц -Ьц- --Ьи1
где - скважность импульсов;
tyi- длительность импульса;
1ц- длительность цикла (импульса и паузы);
длительность паузы. Импульсное включение электродвигателя дает возможность производить натяжение цепи при малых оборотах и малой механической мощности электродвигателя, так как механическая
мощность электродвигателя равна Р M.JJ ,
где Р - мехническая мощность электродвигателя;
Н - момент, развиваемый электродвигателем; - угловая скорость вращения
ротора электродвигателя. Таким образом, при натяжении происходит ограничение мощности электродвигателя, что уменьшает динамические удары н цепи, предотвращает обрыв цепи в случае ее заклинивания и повышает безопасность ведения ра бот. Электродвигатель, включаясь кра ковременно (фиг.2в), производит подтягивание второго конца цепи. Вначале происходит выбирание слаби ны цепи, поэтому натяжение цепи PU, О фиг.2е). После того, как слабина выбрана, усилие в печи начинает увеличиваться. За время икгпульса приращение усилия в цепи равно йР ,По мере увеличения усилия в цепи повышается выходной сигнал датчика 3 усилий (фиг.25. При этом длительность импульсов программног блока увеличивается, увеличиваются и промежутки времени включенного состояния электродвигателя, однако они.не становятся больше времени выхода электродвигателя на устойчи вый участок механической характеристики, так как время выхода элек двигателя на устойчивый участок ха рактеристики также увеличивается по мере роста сопротивления нагрузки (увеличения усилия натяжения). Храпсгвый механизм предотвращает проворачивания звезды привода в направлении, противоположном натяжению, т.е. сумма приращений, усилий в цепи увеличивается. Визуальный контроль за усилием натяжения производится по показывающему прибору 6. Когда величина усилия в тяговой цепи достигает заданного значения, происходит отключение программного блока. Устройство, реализующее способ, работает следующим образом. Программный блок 1 состоит из ге нератора 7 циклов, первой и второй схем 8 и 9 совпадения, порогового узла 10 заданного усилия натяжения, порогового узла I1 минимального усилия натяжения, регистра 12 сдвига, одновибраторов 13-15, схемы ИЛИ 16 и ключа 17. В исходном состоянии (цепь не натянута) Ри О и Up 0. На вход Генератора 7 циклов с порогового узла 10 поступает разрешаюо й сигнал. С порогового узла 11 на схему 8 совпадения поступает разрешающий сигнал, а на схему 9 совпадения запрещающий сигнал. После нажатия кнопки запуска уст ройства 2 оперативного управления . генератор циклов начинает вырабатывать импульсы с периодом следования feu , которые поступают на схемы 8 и 9 совпадений. Учитывая, что на второй вход схемы 8 совпадения поступает разрешающий сигнал, импульсы генератора поступают на схему ИЛИ 16, а затем на ключ 17. На выходе ключа 17 появляются импульсы (фиг.2а), поступающие иа пуско-стоповую аппаратуру 4, которая- подключает электродвигатель 5 к сети на время (фиг.2б). Электродвигатель, включаясь кратковременг но, производит выбирание слабины цепи. При этом еще 0 и Ug 0. После выбирания слабины цепи усилие в цепи начинает увеличиваться: РцуО Когда усилие натяжения цепи становится paBHt.iM минимальному усилию натяжения Py,jyj , сигналы на выходах порогового узла iI изменяются на противоположные: на вход схемы в совпадения поступает запрещаниций сигнал, а на вход схемы 9 совпадения - разрешакшцш. Очередной импульс с генератора 7 циклов через схему 9 совпадений поступает на регистр 12 сдвига. На выходе 1 регистра I2 сдвига появляется сигнал, запускающий одновибра.тор 13. Последний формирует импульс,длительность которого больше длительности предыдущих импульсов, т.е. больше длительности импульсов генератора циклов.После появления последующего импульса с генератора 7 циклдв на выходе 2 регистра }2 сдвига появляется сигнал. Одновнбратор 14 формирует импульс, длительность ко- ; торого больше длительности импульса, формированного одновибратором 13. аким образом , с генератора 7 циклов . а схему ШЮ 16 поступают импульсы увеличивающейся длительностью. Это начит, что каждое последующее вклюение двигателя продолжительнее преыдущего. При достижении заданного усилия атяжения цепиГздд СФиг.2г,) с поогового узла 10 на генератор 7 цнков поступает запрещающий сигнал. енератор прекращает работу. Цепь атянута с заданным усилием F q имальное усилие натяжения задается, сходя из конкретных условий (длины труговой установки, угла падения ласта и параметров электропривода). Учитывая, что после выбирания лабины цепи процесс натяжения про19
пщпли re: и . iioci (;я1пгым шагом храпоиого мех,1ии)мл, т.о. удлипемио цепи Шличяма ИСКгстчниая , приращение усичия н цепи ДР и рабочем диапазоне у(:илим натяжения нлляется также постоянкой величиной. Это чначит,что усилие натяжения, следовательно, и сопротивление нагрузки на двигатель линейно HO3pacTajOT. Поэтому необходимо увеличивать длительность импульсов пропорционально усилию натяжения цепи Рц , т.е. закон формирования длительности импульсов программным блоком задают в следующем виде
V к F,
где к - )ijniieHT пропорциональности, зависящий от конкретных условий, параметров электропривода и обеспечивающий включение электродвигателя на время, меньшее времени его выхода на устойчивый уч асток механической характеристики.Эти достигается ограничение его механической мощности. Для описанного варианта устройства натяжения длительности импульсов одновибраторов 13 - 15 необходимо предварительно установить такими, чтобы их рост был пропорционапен усилию натяжения.
Достоинство предлагаемого способа заключается в том, что натяжение цепи производится при малой скорости и Ьграниче1гной механической мощности электродвигателя за счет того, что промежуток времени каждого включенного состояния электродвигателя меньше времени выхода его на устой38
чивый участок механически характеристики, это исключает динамические удары в цепи, механическое разрушение цепи в случае ее к;п1нения, перенатяжения цепи, что, в свою очередь, уменьшает возможность травматизма обслуживающего персонала.
Способ может найти применение для натяжения тяговой цепи струга (или конвейера) и быть реализован в аппаратуре АРУС автоматизации струговых установок.
Формула изобретения
Способ натяжения цепи угольного струга и конвейера посредством импульсного включения приводного электродвигателя, основанный на контроле величины усилия в цепи и отключении электродвигателя при достижении последней заданного значения, о т.л и- чающийся тем, что, с целью повышения надежно«;ти, длительность импульсов включенного состояния электродвигателя формируют меньше времени выхода на его устойчивый участок механической характеристики и увеличивают ее пропорционально усилию натяжения.
Источники информации, принятые во внимание при экспертизе
и проектно-конструкторский институт им.А.М.Терпигорева, 1976, с. 79,80 (прототип).
