(54) УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ТРАНСПОРТНЫХ
1
Изобретение относится к весоизмерительной технике, в частности к устройствам для взвешивания транспортных средств, например автомобилей при их движении.
Известны весоизмери ельные устройства для взвешивания транспорфных средств, содержащие грузоприемную платформу, опирающуюся на датчики веса, подключенные к блокам обработки информации с узлами подавления помехи tH.
Известные устройства сложны и не обеспечивают требуемую точность.
Наиболее близким по технической сущности к предлагаемому является устройство для взвешивания транспортных средств, содержащее дифференциатор-формирователь, покдлюченный к одному входу триггера непосредственно, а к другому через линию задержки, схему совпадения, один вход которой соединен с выходом триггера, датчик веса и регистрирующий блок 21
Известное устройство не обеспечииает требуемую точность взвешивания, так как не учитывает затухание переменной составляющей переходного процесса.
СРЕДСТВ
Цель изобретения - повышение точности устройства.
Поставленная цель достигается тем, что в устройство для взвешивания транспортных средств введены счетчик,, ключ, коммутатор, масшта- бирующий блок, квадратор, две ячейки памяти, вычитатель и делитель,
10 причём датчик веса через сигнальный вход ключа связан с входом дифференциатора-формирователя и с другим входом схемы совпадения, выход которой и выход счетчика подключены к вхо15дам коммутатора, первый выход которого соединен с первым входом вычитателя, второй выход коммутатора подключен к входам масштабного блока и квадратора, выходы которых через
20 соответственно первую и вторую ячейку памяти соединены со вторым входом вычитателя и вторым входом делителя, первый вход которого соединен с выходом вычитателя, а выход - с реги25стрирующим блоком,при этом выход регистрирующего блока подключен к входу серое счетчика, счетный вход которого соединен с выходом триггера, а управляющий вход ключа подключен к
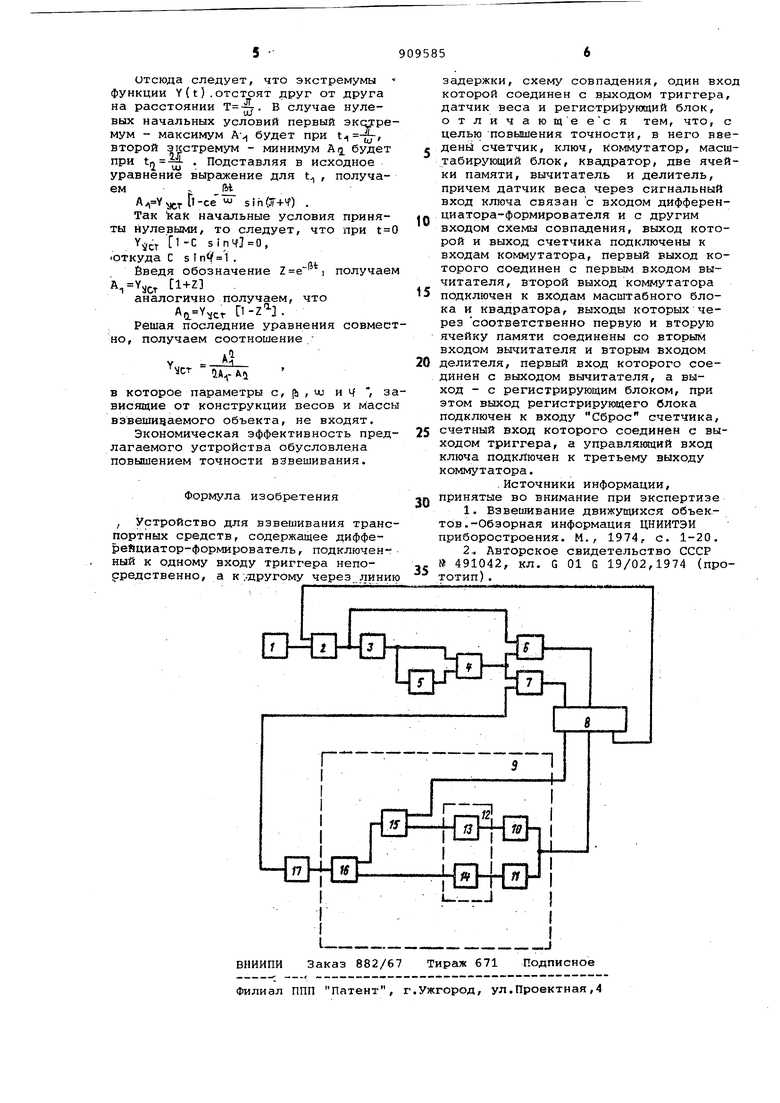
30 третьему выходу коммутатора. На чертеже представлена блок-схе ма предлагаемого устройства. Устройство содержит датчик 1 вес ключ 2, дифференциатор-формировател 3, триггер 4, линию 5 задержки, схе му 6 совпадения, счетчик 7 сигналов коммутатор 8, вычислитель 9, состоя щий из масштабного блока 10, квадра тора 11, запоминающего блока 12 с двумя ячейками 13 и 14 памяти, вычитателя 15.и делителя 16, и регист рирующйй блок 17. . Устройство работает следующим об разом. После наезда транспортного средства на грузоприемную платформу весов (не показана, датчик 1 веса вьвда ет сигнал в виде суммы постоянной составляющей, соответствующей установившемуся значению показаний весов, и переменной составляющей переходного -процесса. Сигнал с датчика 1 веса подается через ключ 2 на вход дифференциатора-формирователя 3 и на первый вход схемы 6 совпадения. В момент перехода переменной составляющей через экстремальное значение сигнал с выхода дифференциатора-формирователя 3 поступает на единичный вход триггера 4 и на вход линии 5 задержки. Триггер 4 переходит в единичное состояние . Сигнал с выхода триггера 4 подается па второй вход схемы б сов падения и на первый вход счетчика 7 сигналов. При этом схема 6 совпадения открывается, а также происходит запуск счетчика 7 сигналов. Через время С , необходимое для считывания сигнала с датчика 1 веса, сигналом с линии 5 задержки триггер 4 возвращается в исходное нулевое соетояние и схема 6 совпадения закрывается . При переходе переменной составляю щей через первое экстремальное знача ние счетчик 7 сигналов выдает на вто рой вход коммутатора 8 сигнал разрешения коммутации второго входа вычис лителя 9 с выходом схемы б. совпадения. При переходе переменной составляющей через второе экстремальное значение счетчик 7 сигналов выдает на второй вход коммутатора 8 сигнал разрешения коммутации первого входа вычислителя 9 с выходом схемы б совпадения. Этот же сигнал используется Для размыкания ключа 2, второй вход которого соединен с третьим выходом |соммутатора 8. При этом выход датчиka 1 веса отключается от остальной части устройства. Вычислитель 9 работает следующим образом. Сигнал, поступающий на второй вход вычислителя 9 и -соответствующий первому экстремальному значению переменной составляющей, параллельно подается на масштабный блок 10, где он удваивается, и на квадратор 11, в котором производится операция возведения входного сигнала в квадрат. Полученные в результате этих операций сигналы заносятся соответственно в ячейки 13 и 14 памяти запоминающего блока 12. Сигнал, поступающий на первый вход вычислителя 9 подается на первый вход вычитателя 15, на второй вход которого подается запомненный первой ячейкой 13 памяти выходной сигнал масщтабного блока 10. С выхода вычитателя 15 сигнал, равный разности входных сигналов, подается на вход делителя 16, на другой вход которого поступает запомненный второй ячейкой 14 памяти сигнал квадратора 11. На выходе делителя 16 получается сигнал, соответствующий установившемуся значению веса транспортного средства, определенный на основании измерения двух экстремальных значений переменной составляющей. Этот сигнал с выхода делителя 16 подается на вход регистрирующего блока 17для последующего отображения в необходимом виде. С выхода регистрирующего блока 1 на второй вход счетчика 7 сигналов вьвдается сигнал Сброс, восстанавливающий его исходное состояние. Повторное включение устройства осуществляется подачей на коммутатор 8 команды Старт, по которой происходит замыкание ключа 2. Работа предлагаемого устройства основывается на том, что переходный процесс в системе, содержащей упругий элемент, некоторую массу и демпфер, получен в результате решения дифференциального уравнения второго порядка. Это решение в рассматриваемом случае имеет вид V(t) 1-се- sin(ujt+) , где Y(t) - мгновенное показание весов;.T установившееся показание весов; t,(l,U), - парамерты, характеризующие конструкцию весов и зависящие, в частности от массы груза; t - время. Точки экстремума функции Y(t) определены наиболее точно, поскольку функция изменяется медленно и можно произвести точный отсчет показаний весов. Производная функции Y(t) в точках экстремума принимает нулевое значение, поэтому, приравняв производную функции Y(t) нулю, получаем VCT -се cos(u)t-fV)-(((jOt+V) 0. Отсюда tq (iut.+ ) , где t,. - абсциссы точек экстремума.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычисления функций у=aRcSINx и у=aRccoSx | 1980 |
|
SU935949A1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА НАГРУЗКИ САМОЛЕТА | 2003 |
|
RU2260179C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ ТОЛЩИНЫ СЛОЯ ШЛАКА В КОВШЕ ПРИ ВНЕПЕЧНОЙ ОБРАБОТКЕ СТАЛИ | 2008 |
|
RU2392334C1 |
| Способ поосного взвешивания подвижных объектов | 1988 |
|
SU1522045A1 |
| Способ взвешивания движущихся объектов | 1990 |
|
SU1800269A1 |
| Устройство для контроля и управления технологическими процессами испытаний и тренировки фотоэлектронных умножителей | 1988 |
|
SU1517041A1 |
| Телеизмерительная система | 1986 |
|
SU1399793A2 |
| Устройство для поиска координат точки экстремума функции двух переменных | 1981 |
|
SU966703A1 |
| Устройство для статистической обработки информации | 1980 |
|
SU942043A1 |
| Спектральный анализатор случайных сигналов | 1984 |
|
SU1269048A1 |
