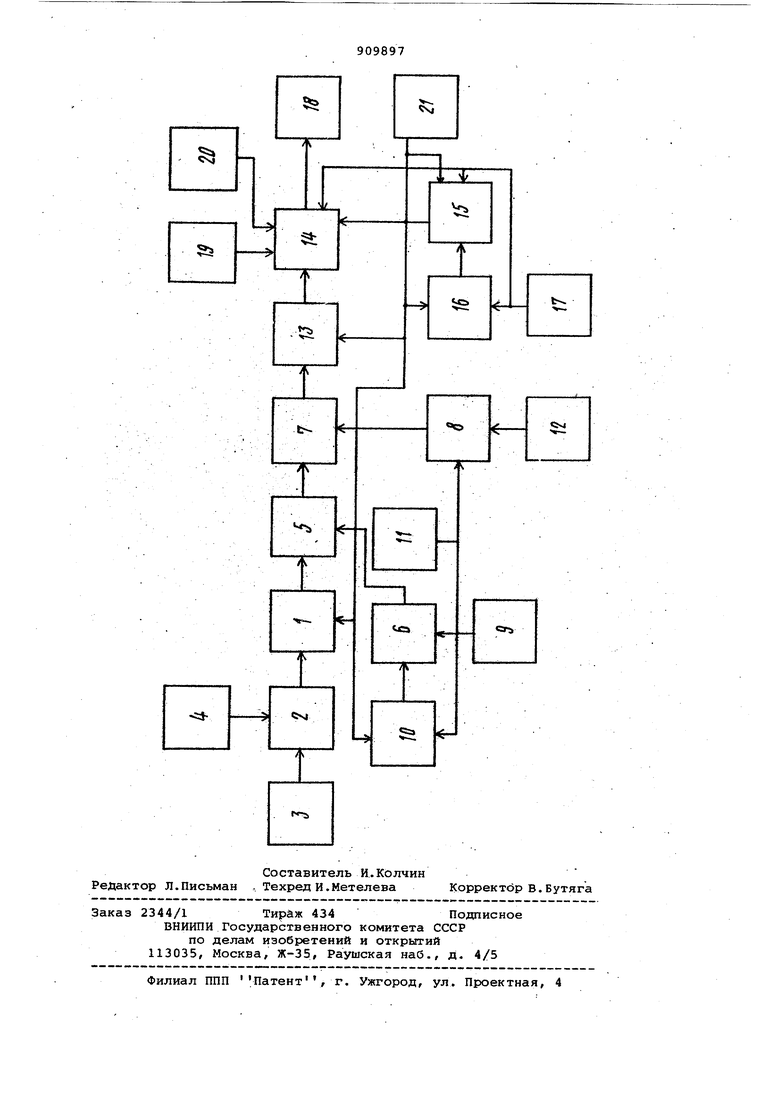
Изобретение относится к авиационной технике, а точнее к системам автоматического управления летател ным аппаратом. I Известно устройство автоматичес кого управления самолетом при уход на второй круг, содержащее эадатчи угла .тангажа, датчик угла тангажа, блок сравнения и директорный. пилотажный прибор, а также интегратор обратной связи tlj. Недостатком данного устройства является статичность к возмущениям по Ьысоте. Наиболее близким по технической сущности к данному изобретению является устройство для управления траекторией самолета при уходе на второй круг, содержащее задатчик подъема траектории, последовательно соединенные первый интегратор и первый сумматор, второй сумматор, входы которого соединены с датчикс1м высоты, угла тангажа и угловой -ско рости тангажа, а выход - с директор ным пилотажным прибором, а также датчики угла наклона глиссаДы, критического угла атаки и .воздушной скорости, блок синхронизации. С2. Недостатком этого устройства является то, что оно статично к быстрым турбулентным возмущениям. Вертикальный порыв ветра приводит к изменению высоты самолета и кратковременному изменению вертикальной скорости, которое из-за мало1й длительности может быть не обнаружено или не отработано системой из-за ее инерционности. . Цель изобретения - повьпоение без опасности полета за счет компенсации воздействия на самолет турбулен ных возмущений. Это достигается тем, что в устройство для управления траекторией самолета .при уходе на второй круг, содержащее задатчик подъёма траекто рии, последовательно соединенные первый интегратор и первый сумматор второй сумматор, входы которого соединены с датчиками высоты, угла тангажа и угловой скорости тангажа, а выход - с директорньм пилотажньм прибором, а также датчики угла накл на-глиссады, критического угла атаки и воздушной скорости, блок синхронизации, введены между первьм и вторым сумматором последовательно соединенные ограничитель и второй интегратор, эадатчик перегрузки и соединенный с ним кокмутатор,- управляющий вход которого соединен с датчиком критического угла атаки, а выход - с первьм интегратором, пе вое запоминающее устройство,вход которого соединен с датчиком воздушной скорости, второе запоминающее, устройство, вход которого соединен с датчиком высоты, переключатель, через нормально разомкнутый контакт которого второе запоминающее устройство соединено с одним из входов второго сумматора, первый и второй блоки умножения, вхо- . ды первого блока умножения связаны с первым запоминающим устройством и датчиком угла наклона глиссады, а (ВЫХОД первого блока умножения связан со вторым входом первого сумматора, входы второго блока умножения связаны с датчиком воздушной скорости и задатчиком подъема траектории, а выход второго блока, умножения связан с ограничителем, причем первый и второй интеграторы, первоеи второе запоминающее устройства и управляющий вход переключателя соединены с блоком синхронизации, а датчик высоты через нормально замкнутый контакт переключателя связан с одним из входов второго сумматора. На чертеже представлена структурная схема устройства для управления траекторией самолета при уходе на второй круг. Устройство содержит первый интегратор 1, вход которого через коммутатор 2 подключен к датчику 3 перегруз1КИ коммутатор 2 связан также с датчиком 4 критического угла атаки, выход первого интегратора 1 подключен к суммирующему входу первого сумматора 5, вычитающий вход которого связан с первым блоком б умножения. Выход первого сумматора 5 соединен с ограничителем 7, связанньах с вторым блоком 8 умножения, первый блок 6 умножения, связан с.датчиком угла наклона глиссады 9 и выходом первого запоминающего устройства 10, вход которого соединен с датчиком воздушной скорости 11 и вторым блоком 8 умножения, второй вход которого связан с датчиком 12 подъема траектории, вход второго интегратора 13 связан с ограничителем 7, выход второго интегратора 13 связан с одним из суммирующих входов второго сумматора 14, другой его суммирующий вход связан через нормально разомкнутые контакты переключателя 15 с выходом-второго запоминающего устройства 16, вход которого соединен с датчиком 17 высоты, который через нормально замкнутый контакт переключателя 15 связан с вычитающим входом второго сумматора 14, выход которого связан с директорным пилотажным прибором 18, к другим суммиру1рщим входам второго сумматора 14 подключены датчики угла тангажа 19 и угловой скорости танжага 20, выходы блока 21 синхронизации связаны с входами первого 1 и второго 13 интеграторов, первого 10 и второго 16 запоминающих устройств и переключателя 15. Устройство работает следующим образом. . Напряжение, пропорциональное допустимой нормальной i перегруз-Re, с задатчика 3 через коммутатор поступает на вход первого интегратора 1. Выходное напряжение этого интегратора определяет закон изменения вертикальной скорости при уходе на второй круг и представляет собой линейно возрастающее от н ля напряжение, скорбеть нарастания которого пропорциональна допустимо 1перегрузке, из этого напряжения в первом сумматоре 5 вычитается выходное; напряжение первого,блока 6 умножения, пропорциональное произведению напряжений; пропорциональных углу наклона глиссады и значению воздушной скорости, запомненно му в момент принятия решения об уходе на второй круг, таким образо выходное напряжение первого суммат ра -5 пропорционально заданной вертикальной скорости ухода на второй круг. В ограничителе 7 это напряжение ограничивается сверху на уро не., равном напряжению, снимаемому со второго блока 8 умножения, ко-торое пропорционально максимально допустимой вертикальной скорости подъема. Выходное напряжение ограничителя 7, определяющее, заданную вертикальную скорость ухода на вто рой круг, поступает на вход второг интегратора 13, с рыхода которого снимается напряжение, пропорционал ное заданной высоте полета в кажды момент времени, это напряжение во втором сумматоре 14 суммируется с напряжением, пропорциональным теку щей высоте полета, поступающим на вычитающий вхог второго сумматора с датчика высоты 17 или со второго запоминающего устройства 16, напряжени.е на выходе которого пропор ционально высоте на которой находи самолет в момент принятия решения уходе на второй круг. На второй су матор 14 поступают также демпфирующие сигналы с датчиков угла тангажа 19 и угловой скорости 20. С вйхода второго сумматора 14 снимается управляющий сигнал, пропорцио- . нальный рассогласованию заданной высоты и текущей высоты, который поступает на директорно-пилотажный прибор 18. Для синхронизации работы устройства во времени служит блок синхронизации 21, который в момент принятия решения об уходе на второй круг вырабатывает сигнал, включающий первый 1 и второй 13 интеграторы, а первое и второе запоминающие устройства запоминают в этот момент времени значения входных напряжений. По сигналу блока синхронизации 21 переключатель 15 подключает к входу второго сумматора 14 выход второго запоминающего устройства 16 вместо датчика 17 высоты. Этим обеспечивается плавное измёнение управляющего сигнала без скачков за счет переходных процессов. Для исключения возможности выхода самолета на большие углы атаки предусмотрена стабилизация задаваемой вертикальной скорости на уровне, предшествующем критическому углу атаки. При достижении углом атаки критического значения срабатывает датчик критического угла атаки 4 и коммутатор 2 отключает вход первого интегратора 1 от задатчика 3 перегрузки- Интегратор переводится в режим памяти и запоминает достигнутое на его выходе напряжение на все время, пока угол атаки равен критическому и ксмимутатор pa30NiKHyT. При использовании данного изобретения появляется возможность эффективно компенсировать последствия тsфбyлeнтныx возмущений, воздействующих насамолет, что существенно повышает безопасность полетов за счет улучиюния качества управления, что особенно важно при малых высотах, с которых осуществляется УХОД на второй круг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления траекторией самолета при уходе на второй круг | 1982 |
|
SU1091470A2 |
| СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА ПАЛУБУ КОРАБЛЯ | 1995 |
|
RU2129971C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ СНИЖЕНИИ НА ЭТАПЕ СТАБИЛИЗАЦИИ ВЫСОТЫ КРУГА | 2018 |
|
RU2703378C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2023 |
|
RU2801013C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2830721C1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ САМОЛЕТА ПРИ УХОДЕ НА ВТОРОЙ КРУГ, содержащее задатчик подъема траектории, последовательно соединенные первый интегратор и первый сумматор, второй сумматор, входы которого соединены с датчиками высоты, угла тангажа и угловой скорости тангажа, а выход - с директорным пилотажным прибором, а также датчики угла наклона глиссады, 1е.ритического угла атаки и воздушной скорости, блок синхронизации, о т ли чаю щ е ее я тем, что, с целью повЕлиения безопасности полета, в него введены между первым и вторым сумматором последовательно соединенные ограничитель и второй интегратор, задатчик перегрузки и соединенный с ним коммутатор, управляющий вход которого .соединен с датчиком критического угла атаки, а выход - с первым интегратором, первое запоминающее устройство, вход которого соединен с датчиком воздушной скорости, второе запоминающее устройство, вход которого соединен с датчиком высоты, переключатель, через но1 ально разомкнутый контакт КОТОРОГО второе запоминающее устройство соединено с одним из входов второго сумматора, первый и второй блоки умножения, входы первого блока s нoжeния связаны с первьм запоминающим устройством и датчиком угла наклона глиссады, а выход первого блока умножения.связан с вторьм (Л входом первого сумматора, входы второго блока умножения связаны с датчиком воздушной скорости и задатчиком подъема траектории, а выход второго блока умножения связан с ограничителем, причем первый и второй интеграторы, первое и второе запоминаюсо щее устройства и управляющий вход О переключателя соединены с блоком синхронизации, а датчик высоты через со нормально замкнутый контакт переклю00 чателя связан с одним из входов второго сумматора. со 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЭКСТРАГЕНТ ДЛЯ ИЗВЛЕЧЕНИЯ β,β′ -ДИХЛОРДИЭТИЛСУЛЬФИДА ИЗ ПРОБ ПОЧВЫ | 1996 |
|
RU2119160C1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент 3847328,нац | |||
| ,кл | |||
| Нагревательный прибор для центрального отопления | 1920 |
|
SU244A1 |
