1
Изсбретение огносится к балансировочной технике и может быть использовано в измерительной технике цля определения неуравновешенности изделий и устранения ее.
Известно устройство для уравновешит вания сферических роторов, содержащее основание, установленную на -нем газовую подшипниковую опору цля установки изделия и механизм контроля положения ротора в оп оре. 1
Наиболее близким по технической сущности к предлагаемому является устройство для уравновешивания изделий, содержащее основание, колебательный контур, выполненный в виде рамы, газовую подшипниковую опору для установки иэделия, связанную с рамой так, чго их оси симметрии совпадают, а механизм контроля положения ротора в опоре 2 J .
Оцнако известное устройство обладает недостаточной точностью уравновешивания, так как оно не позволяет устранить влияние к(оментов, возникающих
из-за неточности изготовления подшипниковой опоры и уравновешивающего изделия и связанной с этим неточности установки изделия в опору.
Целью изобретения является повышение точности.
Поставленная цель цостигаегся тем, что усгройсотао снабжено узлом регулиро- . вания положения оси опоры, выполненным
10 в вице грех размещенных один нац. ору- гим соосных дисков, ИЗ- которых смежные диски соединены между собой по образующим во взаимно перпендикулярных направлениях,. в нижнем диске поц
15 прямым углом к направлению соеаинения его со средним диском выполнена радиальная регулируемая прорезь, и дифференциальных микрометрических винтов, соединяющих смежные диски, а.нижний
20 диск установлен на основании так, что ось симметрии его совпадает с осью симметрии рамы, которая установлена на верхнем диске.
39
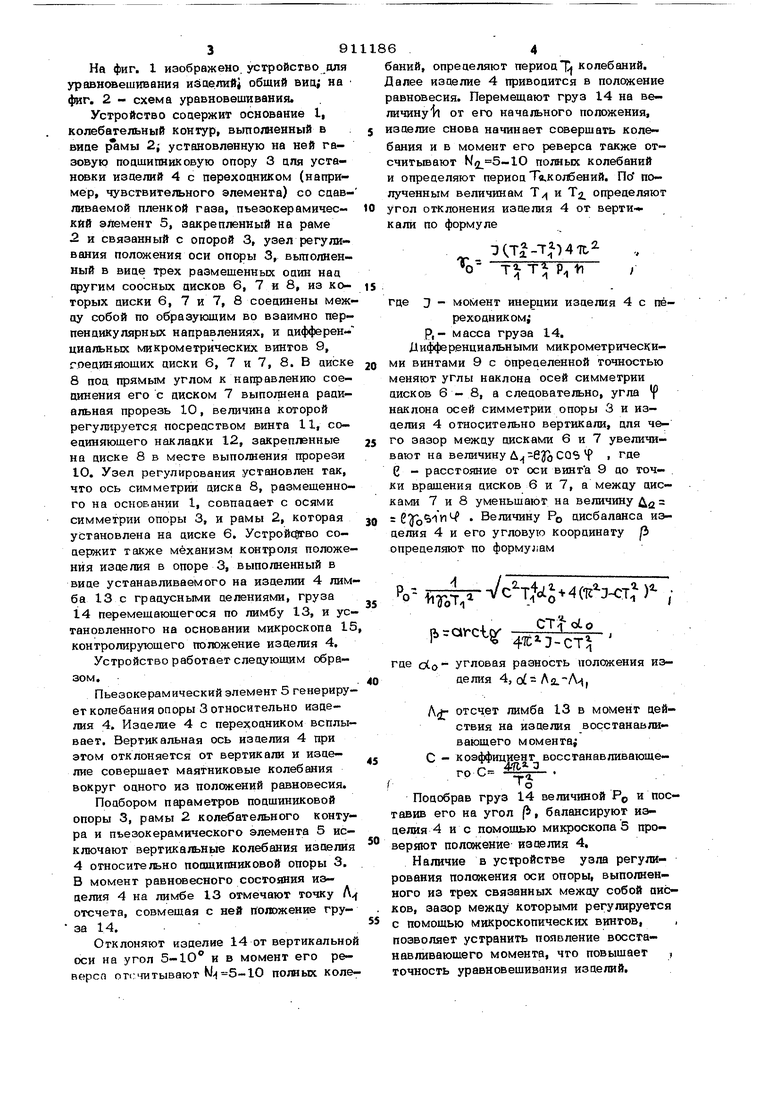
На фиг. 1 изображено устройство для уравнсюешивания изцелий обший виц; на фиг. 2 - схема уравновешивания.
Устройство содержит основание I, колебательный контур, выполненный в вице амы 2; установленную на ней газовую подшипниковую опору 3 цпя устаН1ЖКИ изделий 4 с переходником (например, чувствительного элемента) со сдавливаемой пленкой газа, пьезокерамическйй элемент 5, закрепленный на раме 2 и связанный с опорой 3, узел регуливания положения оси опоры 3, вьтолненный в виде трех размешенных один над другим соосных дисков 6, 7 и 8, из которых диски 6, 7 и 7, 8 соединены между собой по образующим во взаимно перпендикулярных направлениях, и дифференциальных микрометрических винтов 9, грединяюших диски 6, 7 и 7, 8. В диске 8 под прямым углом к направлению соединения его с диском 7 выполнена радиальная прорезь 10, величина которой регулируется посредством винта 11, соединяюшего накладки 12, закрепленные на диске 8 в месте выполнения прорези 10. Узел регулирования установлен так, что ось симметрии диска 8, размещенного на основании 1, совпадает с осями симметрии опоры 3, и рамы 2, которая установлена на диске 6. Устройство содержит также механизм контроля положения изделия в опоре 3, выполненный в виде устанавливаемого на изделии 4 лимба 13 с градусными делениями, груза 14 перемещающегося по лимбу 13, и установленного на основании микроскопа 15 контролирующего положение изделия 4,
Устройство работает следующим образом.
Пьеаокерамический элемент 5 генерирует колебания опоры 3 относительно изделия 4. Изделие 4 с переходником всплывает. Вертикальная ось изделия 4 при этом отклоняется от вертикали и изделие соверщает маятниковые колебания вокруг одного из положений равновесия.
Подбором параметров подщиниковой опоры 3, рамы 2 колебательного контура и пьезокерамического элемента 5 исключают вертикальнью колебания изделия 4 относительно подшипниковой опоры 3. Б момент равновесного состояния изделия 4 на лимбе 13 отмечают точку Л.( отсчета, совмещая с ней положение груза 14.. Отклоняют изделие 14 от вертикальной оси на угол 5-10° и в момент его реверсп отсчитывают полных коле-
11864
баний, определяют период1; | колебаний. Далее изделие 4 приводится в положение равновесия. Перемещают груз 14 на величину ll от его начального положения,
5 изделие снова начинает совершать колебания и в момент его реверса также отсчитывают полных колебаний и определяют период Та.колбений. По полученным величинам Т и Т определяют
О УГОЛ отклонения изделия 4 от верти- кали по формуле
Т от т Р, п
где Э - момент инерции изделия 4 с переходником, р, - масса груза 14. Дифференциальными микрометрическими винтами 9 с определенной точностью меняют углы наклона осей симметрии дисков 6-8, а следовательно, угла наклона осей симметрии опоры 3 и изделия 4 относительно вертикали, для чего зазор между дисками 6 и 7 увеличивают на величину COS где С - расстояние от оси винта 9 до точки вращения дисков 6 и 7, а между дисками 7 и 8 уменьшают на величину Д
- Величину РО дисбаланса изделия 4 и его угловую координату |3 определяют по формулам
Po- Fjbl;T-Vc44 J. ,rx-av oif CTtoLo
где о(.о угловая разность положения изделия 4, о( Л2.-Л-(,
Л,; отсчет лимба 13 в момент действия на изделия восстанавливающего момента;
С - коэффициент восстанавливающе„„ г- -ФиД-З гоС о
Подобрав груз 14 величиной Рр и поставив его на угол (Ь, балансируют изделия 4 НС помощью микроскопа 5 проверяют положение изделия 4.
Наличие в устройстве узла регулирования положения оси опоры, выполненного из трех связанных между собой дисков, зазор между которыми регулируется с помощью микроскопических винтов, , позволяет устранить появление восстанавгаваюшего момента, что повыщает , точность уравновешивания изделий.
Формула изоЬрегения Усгройсгво аля уравновешивания иэцелий, содержащее основание, колебательный контур, выполненный в вице рамы, газовую подшипниковую опору для установки изделия, связанную с рамой так, что их оси симметрии совпадают, отличающееся тем, что, с целью повышения точности, оно снабжено узлом регулирования положения оси опоры, выполненным в виде трех размещенных один над другим соосных дисков, из которых смежные диски соединены между собой по образующим во взаимноперпендикулярных направлениях, в нижнем диске под прямым углом к направлению
соединения его со средним диском выполнена радиага ная регулируемая прорезь, и ДИ(|4|ерекциальных. микрометрических винтов, соединяющих смежные - диски, а нижний диск установлен на основании так, что ось симметрии его совпадает с осью симметрии рамы, которая установлена на верхнем диске.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР fc 439715, кл. Q01 М 1/12, 1971.
2.Авторское свидетельство СССР N 303288, кл. QOI М 1/12, 1968 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для уравновешивания изделий | 1983 |
|
SU1104367A2 |
| Устройство для уравновешивания изделий | 1986 |
|
SU1350512A2 |
| Устройство для установки колеблющегося инструмента | 1980 |
|
SU973252A1 |
| СПОСОБ ВЕРТИКАЛЬНОЙ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЯ | 2017 |
|
RU2674423C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СТАТИЧЕСКОГО МОМЕНТА ЛОПАТОК КОМПРЕССОРА АВИАЦИОННЫХ ДВИГАТЕЛЕЙ | 2006 |
|
RU2314509C1 |
| Устройство для вибрационной обработки | 1984 |
|
SU1175678A2 |
| СПОСОБ ВЕРТИКАЛЬНОЙ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2539810C1 |
| СТАНОК ДЛЯ ОБРАБОТКИ ОТВЕРСТИЙ В ЧАСОВЫХ И ПРИБОРНЫХ КАМНЯХ | 1970 |
|
SU262649A1 |
| УСТРОЙСТВО ДЛЯ УРАВНОВЕШИВАНИЯ ШПИНДЕЛЕЙ ПРОКАТНЫХ СТАНОВ | 1998 |
|
RU2154540C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2579827C1 |

Ось наклона
