Изобретение относится к автоматическому управлению механизмами перемещения и может быть применено, например, в числовом программном управлении (ЧПУ) металлорежущих станков при наличии люфта в кинематике их приводов и необходимости в высокой точности слежения.
Известен следящий привод с коррекцией люфта, осуществляемой охватом привода в зоне его реверса жесткой отрицательной обратной связью по скорости, вместо гибкой 1. Известен также следящий привод с компенсацией люфта IB редукторе, осуществляемой с помощью блока компенсации в функции разности углов поворота входного и выходного валов редуктора 2. Известные следящие приводы характеризуются понижением точности слежения в зоне реверса привода, особенно при переменном по величине люфте; невозможностью скомпенсировать разность углов поворота входного и выходного валов редуктора, возникающую без раскрытия люфта иупругих деформаций, которая имеет место в следящем приводе тяжелых металлорежущих станков в виде кинематической погрещности, накапливающейся при перемещении за счет неравномерных точности изготовления и износа кинематики привода. Наиболее близким техническим решением к изобретению является устройство, содержащее задатчик, последовательно соединенные первый делитель частоты, первый фазовый дискриминатор, регулятор, силовой редуктор с люфтом, рабочий орган, датчик положения рабочего
органа, а также датчик положения вала двигателя, выход которого через первый импульсный формирователь подключен ко входу первого фазового дискриминатора 3. Это устройство характеризуется невозможностью сохранения с его помощью устойчивости привода в люфте, переменном по величине в различных положениях рабочего органа, вследствие возможного увеличения скорости выхода двигателя из люфта.
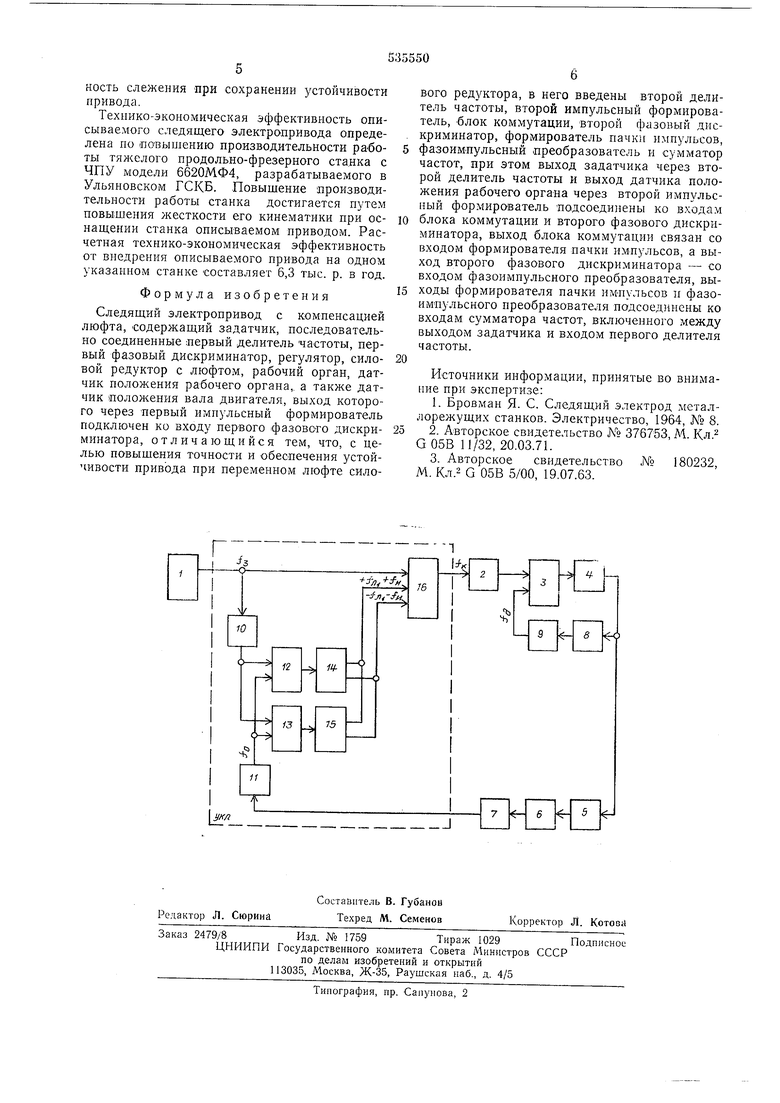
Целью изобретения является повышение точности и обеспечение устойчивости работы при переменном по величине люфте силового редуктора. В описываемом электроприводе это достигается тем, что в него введены второй делитель частоты, второй импульсный формирователь, блок коммутации, формирователь пачки импульсов, второй фазовый дискриминатор, фазоимпульсный преобразователь и .сумматор частот. При этом выход задатчика через второй делитель частоты и выход датчика положения рабочего органа через второй импульсный формирователь подсоединены ко входам блока коммутации и второго фазового дискриминатора, выход блока коммутации связан со входом формирователя пачки импульсов, а выход второго фазового дискриминатора - со входом фазоимпульсиого преобразователя, выходы формирователя пачки импульсов и фазоимпульсного иреобразователя подсоединены ко входам сумматора частот, включенного между выходом задатчика и входом первого делителя частоты. На чертеже представлена структуриая схема описываемого электропривода и ириияты обозначения: /3 - частота задающего сигнала; /Зд -частота сигнала, соответствующего слежению за неподвижным положением рабочего органа; /л - частота сигнала, компенсирующего люфт силового редуктора в зоне реверса привода;/и - частота сигнала, компенсирующего износ и неточности изготовления кинематики силового редуктора; /к - частота скомпенсированного сигнала; fo, fn. - частота сигналов положения рабочего органа и вала двигателя. Он содержит задатчик 1, первый делитель частоты 2, первый фазовый дискриминатор 3, регулятор 4, силовой редуктор с люфтом 5, рабочий орган 6, датчик 7 положения рабочего органа, датчик 8 положения вала двигателя, первый импульсный формирователь 9, второй делитель частоты 10, второй импульсный формирователь 11, блок коммутации 12, второй фазовый дискриминатор 13, формирователь .. разователь 15 и сумматор частот 16. Первый делитель частоты 2 служит для согласования по величине частоты скомпенсированного сигнала /к с частотой /д сигнала положения вала двигателя. Аналогично второй делитель частоты 10 слул{Ит для согласования задающей частоты /3 с частотой /о сигнала положения рабочего органа. Первый 9 и второй 11 импульсные формирователи предназначены для преобразования гармонических сигналов датчика 8 положения вала двигателя и датчика 7 положения рабочего органа в импульсные, что необходимо для нормальной работы привода. Компенсация постоянной составляющей люфта А- осуществляется при реверсе привода по изменению знака задающего сигнала fsЗнак «+ сигнала /з соответствует соотношению (перемещение, например, вправо), знак «- - соотношению (перемещение влево). По первому импульсу сигнала /з, после изменения его знака, блок коммутации 12 выдает команду на запуск формирователя пачки импульсов 14. Выходной сигнал формирователя 14 в виде пачкн импульсов на частоте с одного из двух его выходов подается на входы суммирования или вычитания сумматора частот 16. Количество импульсов в пачке устанавливается равным величине А-, а частота /л импульсов равной максимальной скорости перемещения привода. При изменении зиака сигнала /з с «+ на «- пачка импульсов на частоте -/л снимается со второго выхода формирователя 14 и подается на вычитание из сигнала -/з в сумматоре частот 16. При обратном изменении знака сигнала /з пачка импульсов на частоте -|-/л снимается с первого выхода формирователя 14 и подается на суммирование с сигналом +/3 в сумматоре частот 16. Выходной сигнал сумматора частот 16 на частоте через делитель частоты 2 подается на вход первого фазового дискриминатора 3. В результате на выходе первого фазового дискриминатора 3 появляется рассогласование, равное А-, которое форсированно отрабатывается приводом с контролем по датчику положения 8 вала двигателя. Компенсация переменной составляющей люфта А- осуществляется следующим образом. В процессе отработки рабочим органом 6 задающего сигнала /з происходит накопление отставания или опережения в его положении относительно положения вала двигателя, вызванное неравномерным износом и неточностью изготовления кинематики привода. Это отставание (опережение) измеряется по рассогласованию фаз сигналов /з и fo вторым фазовым дискриминатором 13 и далее с помощью фазоимпульсного преобразователя 15 прео-бразуется в пропорциональное количество одиночных импульсов, следующих с частотой /; Величина частоты/.. . устанавливается по ожидаемой скорости изменения А , но с учетом фактического быстродействия следящего электропривода. Знак сигнала /и зависит от знаков сигнала /з и рассогласования фаз сигналов fa И /о. Например, сигнал 4-/и формируется как ири отработке сигнала +/з и накоплении отставания в положении рабочего органа 6 относительно вала двигателя, так и при отработке сигнала -/з и накоплении опережения. В обоих случаях сигнал снимается с первого выхода фазоимпульсного преобразователя 15 и подается -на суммирование с сигналом /3 в сумматоре частот 16. Соответственно сигнал -fii формируется как при отработке сигнала +/з и накоплении опережения, так и при отработке сигнала -fa и накоплении отставания. В этих случаях сигнал -f снимается со второго выхода фазоимпульсного преобразователя 15 и подается на вычитание из сигнала fa в сумматоре частот 16. Выходной сигнал сумматора частот 16 на частоте fK /3±fH через первый делитель частот 2 подается на вход нервого фазового искриминатора 3, на выходе которого появяется рассогласование, равное А . Последнее отрабатывается следящим электроприводом с контролем по датчику 8 положения вала двигателя. В результате отработки приводом компенсиующих сигналов А- и А повышается точность слежения при сохранении устойчивости привода.
Технико-экономическая эффективность описываемого следящего электропривода определена по повышению производительности работы тял ;елого продольно-фрезерного станка с ЧПУ модели 6620МФ4, разрабатываемого в Ульяновском ГСКБ. Повышение производительности работы станка достигается путем повышения жесткости его кинематики при оснащении станка описываемом приводом. Расчетная технико-экономическая эффективность от внедрения описываемого привода на одном указанном станке составляет 6,3 тыс. р. в год.
Формула изобретения
Следящий электропривод с компенсацией люфта, содержащий задатчик, последовательно соединенные лервый делитель частоты, первый фазовый дискриминатор, регулятор, силовой редуктор с люфтом, рабочий орган, датчик положения рабочего органа,, а также датчик положения вала двигателя, выход которого через первый импульсный формирователь подключен ко входу первого фазового дискриминатора, отличающийся тем, что, с целью повышения точности и обеспечения устойпивости привода при переменном люфте силового редуктора, в него введены второй делитель частоты, второй импульсный формирователь, блок коммутации, второй фазовый дискриминатор, формирователь пачки импульсов, фазоимпульсный преобразователь и сумматор частот, при этом выход задатчика через второй делитель частоты и выход датчика положения рабочего органа через второй импульсный формирователь подсоединены ко входам блока коммутации и второго фазового дискриминатора, выход блока коммутации связан со входом формирователя пачки импульсов, а выход второго фазового дискриминатора - со входом фазоимпульсного преобразователя, выходы формирователя пачки импульсов и фазоимпульсного преобразователя подсоединены ко входам сумматора частот, включенного между выходом задатчика и входом первого делителя частоты.
Источники информации, принятые во внимание при экспертизе:
1.Бровман Я. С. Следящий электрод металлорежущих станков. Электричество, 1964, N° 8.
2.Авторское свидетельство № 376753, М. Кл. G05B 11/32, 20.03.71.
3.Авторское свидетельство № 180232, М. Кл.2 G 05В 5/00, 19.07.63.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод с компенсацией люфта | 1980 |
|
SU964574A1 |
| Следящий электропривод с компенсацией люфта | 1985 |
|
SU1273875A1 |
| Импульсно-фазовая следящая система | 1977 |
|
SU679934A1 |
| Следящая система | 1988 |
|
SU1524021A1 |
| Фазовая следящая система с комбинированным управлением | 1978 |
|
SU746423A1 |
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| Следящий привод | 1977 |
|
SU682871A2 |
| Привод ориентации шпинделя металлорежущего станка | 1984 |
|
SU1241194A1 |
| Устройство для программного управления электроприводом | 1980 |
|
SU1198458A1 |
| Устройство для программного управления | 1975 |
|
SU601662A1 |
If
