(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ УЗЛА ПРИЖИМНОГО РОЛИКА ПРИВОДА АППАРАТА .МГНИТНО:
I
Изобретение относится к приборостроению, а именно к устройству, с помощью которого можно осуществлять контроль и, как следствие, выбраковку узлов прижимного ролика, каждый из которых работает в приводе аппарата магнитной записи, где перемещение магнитной ленты осуществляется с помощью пары ведувий вал-прижимной ролик..
Известно устройство, предназначенное для контроля стабильности вращения отдельных узлов аппарата магнитной записи, в том числе и стабильности вращения прижимного ролика 113.,
Качество самого прижимного ролика, как и его узла, можно опреде лить в данном случае только тогда, когда узел установлен уже в аппаpar. Даже самый простой демонтаж узла прижимного ролика занимает относительно много времени, что не
позволяет это устройство использовать в качестве контрольного.
Аиапогичное относится и к устройству, в котором контролируют качество вращающихся элементов аппарата магнитной записи, в том числе и прижимных роликов, с точки зрения их осевых колебаний 2.
При соответствующей переделке предыдущего устройства можно исto .пользовать для контроля качества вращающихс:я элементов аппаратов магнитной записи устройство, предназначенное для измерения мощности, потребляемой лентопротяжным
15 устройством аппарата магнитной записи. Устройство содержит умножитель, регистратор, усилитель, электродвигатель и датчик, через который проходит составляющая тока
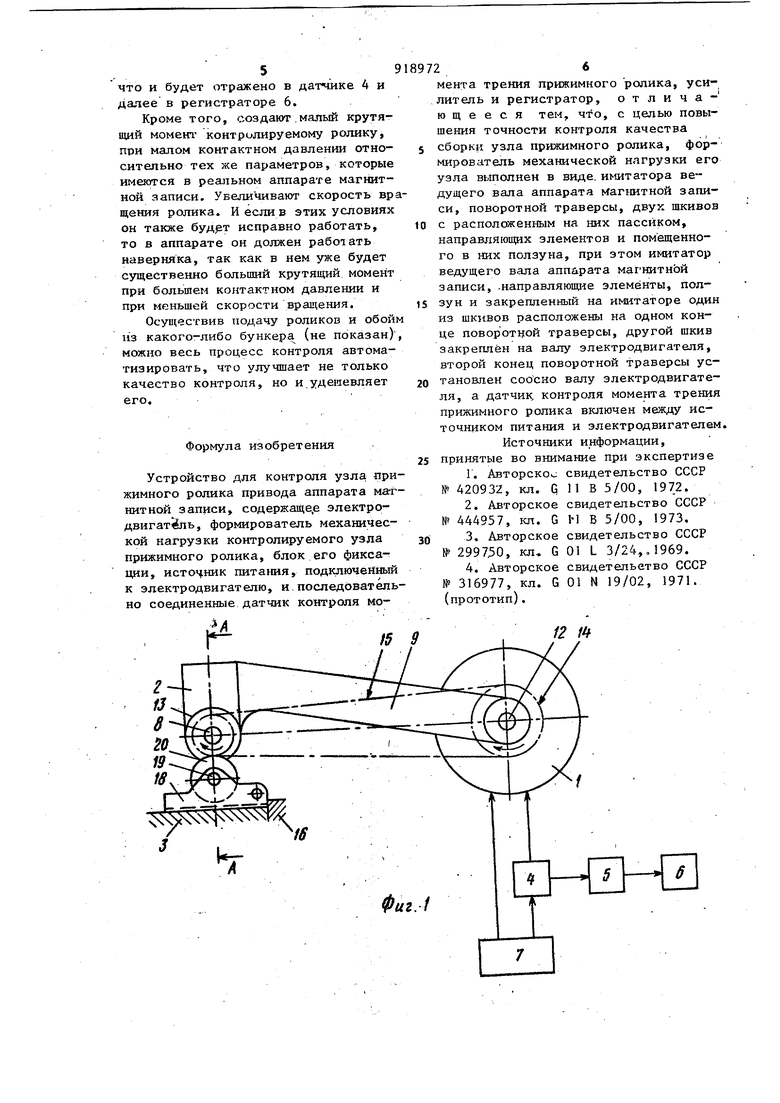
20 потребления электродвигателя - при эксцентричности вращающегося элемента или при его любом неправильном вращехши возрастает ток потребления, что и показывается регистратором. Т.е. в данном случае прижимной ролик работает в реальном режиме без всякой имитации и все показания также реальны, а не условны 13. Устройство требует относительно большой затраты времени на установку прижимного ролика и на его съем, что не позволяет производить оператквный контроль в условиях массового выпуска изделий. Наибсшее близким к предлагаемому является устройство для контроля узла прижимного ролика привода аппарата магнитной записи, содержащее электродвигатель, формирователь механической нагрузки контролируемого узла прижимно1 о ролика, блок его фиксации, источник питания, подключенныйк электродвигателю, и последовательно соединенные датчлк контро ля момента трения прижимного ролрша усилитель и регистратор 4. Устройство не обладает достаточно высокой точностью контроля качества сборки узла прижимного ролика, что в дальнейшем может привести к перерасходу трудозатрат при сборке аппаратов магнитной записи. Цель изобретения - повышена точ- ности контроля- качества сборки узла прижимного ролика. Поставленная цель достигается тем что в устройстве для контроля узла прижимного ролика привода аппарата магнитной записи, содержащем электро двигатель, формирователь механической нагрузки контролируемого узла прижимного ролика, блок его фиксации, источник питания, подключенный к электродвигателю, и последовательно соединенные датчик контроля момента третия прижимного ролика, усилитель и регистратор, формирователь механической нагрузки узла прижимного ролика выполнен в виде имитатора ведущего вала аппарата магнитной записи, поворотной траверсы, двух шк ВОВ с расположенным на них пассиком, направляющих элементов и помещенного в них ползуна, при этом.имитатор ведущего вала аппарата магнитной записи, направляющие элементы, ползун и закрепленный на имитаторе один из шкивов расположены на одном конце поворотной траверсы, другой шкив закреплен на валу электродвигателя, второй конец поворотной траверсы установлен соосно валу электродвигателя, а датчик контроля момента трения прижимного ролика включен между источником питания и электродвигателем. На фиг. 1 показано предлагаемое устройство, вид сбоку, на фиг. 2 разрез А-А на фиг. 1. Электродвигатель 1, участок 2 устройства и блок 3 фиксации составляют часть электромеханической схемы, а датчик 4 контроля момента тре1шя, усилитель 5, регистратор 6 и источник 7 питания составляют полностью электрическую схему. Имитатор 8 ведущего вала аппарата магнитной записи (не показан) установлен на поворотной траверсе 9 совместно с ползуном 10, перемещающимся в направляющих элементах 11, а сама траверса поворачивается на оси 12, которая может быть продолжением вала электродвигателя или в более общем случае установлена соосно валу электродвигателя (вал электродвигателя не показан). На разных концах траверсы установлены шкивы 13 и 14, охваченные пассиком 15, а на блоке 3 фикса.ции установлены сам фиксатор 16 и прижимной элемент 17, в которых закрепляется обойма -18с осью 19 и прижимным роликом 20. Закрепление происходит при помощи буртика 21. Контроль каждого ролика и узла в целом происходит следуняцим образом. Ролик 20 устанавливается таким образом, чтобы он установился в блоке 3, не деформируя обойму 18. Этому способствуют фиксатор 16, буртик 21 и прижимной элемент 17. Далее траверса 9 поворачивается вокруг оси 12 до момента соприкосновения имитатора 8 с самим роликом 20. При этом межосевое расстояние между геометрическим центром имитатора и оси 12 остается неизменным, что не изменяет и натяжение пассика. По направлению стрелки 22 возникает ра/щальная на- грузка, приложенная к ползуну 10. Имитатор вращается за счет передачи момента от электродвигателя через шкив 14,, пассик 15 и шкив 13, закрепленный на самом имитаторе. Между роликом и имитатором возникает механический контакт с определенной силой трения. Преодолеваемое сопротивление выразится в изменении силы тока, потребляемой электродвигателем.
59
что и будет отражено в датчике 4 и далее в регистраторе 6.
Кроме того, создают.малый крутяиий момет- контролируемому ролику, при малом контактном давлении относительно тех же параметров, которые имеются в реальном аппарате магнитной записи. Увеличивают скорость вращения ролика. И если в этих условиях Он также будрт исправно работать, то в аппарате он должен работе ать наверняка, так как в нем уже будет существенно больший крутящий момент при большем контактном давлении и при меньшей скорости вращения.
Осуществив подачу роликов и обойм из какого-либо бункера (не показан), можно весь процесс контроля автоматизировать, что улучшает не только качество контроля, но и,удешевляет его.
Формула изобретения
Устройство для контроля узла прижимного ролика привода аппарата маггнитной записи, содержаще,е электродвигат ь, формирователь механической нагрузки контролируемого узла прижимного ролика, блок его фиксации, источник питания, подключенный к электродвигателю, и.последовательно соединенные датчик контроля мо-
9726
мента трения прижимного ролика, усилитель и регистратор, о т л и ч а ю щ е е с я тем, что, с целью повышения точности контроля качества
5 сборки узла прижимного ролика, формирователь механической нагрузки его узла выполнен в виде, имитатора ведущего вала аппарата магнитной записи, поворотной траверсы, двух шкивов
10 с расположенным на них пассйком, направляющих злементов и помещенного в них ползуна, при этом имитатор ведущего вала аппарата магнитной записи, -направляющие элементы, пол15 зун и закрепленный на имитаторе один из шкивов расположены на одном конце поворотной траверсы, другой шкив закреплён на валу электродвигателя, второй конец поворотной траверсы ус20 тановлен соосно валу электродвигателя, а датчик, контроля момента трения прижимного ролика включен между источником питания и электродвигателем. Источники информации,
25 принятые во внимание при экспертизе
Г. Авторское свидетельство СССР № 42093Z, кл. G 11 В 5/00, 1972.
2. Авторское свидетельство СССР № 444957, кл. G М Б 5/00, 1973.
303. Авторское свидетельство СССР
W 299750, кл, G 01 L 3/24,,1969.
4. Авторское свидетельство СССР № 316977, кл. G 01 N 19/02, 1971. (прототип). f2 /4f
. t
1
Фиг. г
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения проскальзывания пассиковых передач | 1982 |
|
SU1084885A1 |
| Устройство для управления к сортировочным автоматам | 1982 |
|
SU1102643A1 |
| Лентопротяжный механизм | 1990 |
|
SU1792543A3 |
| Лентопротяжный механизм | 1982 |
|
SU1287226A1 |
| Лентопротяжный механизм для нескольких кассет | 1976 |
|
SU614463A2 |
| Реверсивный лентопротяжный ме-ХАНизМ | 1979 |
|
SU801072A1 |
| Реверсивный лентопротяжный механизм | 1989 |
|
SU1748190A1 |
| Лентопротяжный механизм | 1978 |
|
SU777723A1 |
| Устройство для измерения проскальзывания пассика | 1986 |
|
SU1509742A1 |
| РЕВЕРСИВНЫЙ ЛЕНТОПРОТЯЖНЫЙ МЕХАНИЗМ | 1972 |
|
SU337811A1 |

