(5) ПРИВОД БУРОВОЙ ЛЕБЕДКИ

| название | год | авторы | номер документа |
|---|---|---|---|
| Буровая лебедка | 1987 |
|
SU1650566A1 |
| Устройство для вибровращательного бурения | 1982 |
|
SU1078018A1 |
| СООСНЫЙ РЕДУКТОР | 2013 |
|
RU2529943C1 |
| ЛЕБЕДКА | 1995 |
|
RU2099276C1 |
| Спасательное устройство эвакуации из буровой платформы | 2017 |
|
RU2651236C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО (ЕГО ВАРИАНТЫ) | 1991 |
|
RU2134003C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ЗАЧИСТКИ ПОВЕРХНОСТЕЙ | 1991 |
|
RU2024334C1 |
| МАЛОГАБАРИТНАЯ РУЧНАЯ ЛЕБЕДКА | 1999 |
|
RU2196103C2 |
| ЛОВ Скреперная двухбарабанная лебедка | 1961 |
|
SU142006A1 |
| Привод транспортного средства | 1988 |
|
SU1768436A1 |
I
Изобретение относится к грузопод-Вемным устройствам, а именно к приводам с изменением скорости, преимугщественно буровых лебедок.
Известен привод буровых лебедок, содержащий смонтированный на раме .двигатель, связанный с барабаном через устройство для изменения скорости подъема И опускания инструмента 1, С23.
Недостатками известного привода буровой лебедки являются узкий диапазон и ступенчатое регулирование скорости подъема и нерегулируемая скорость спуска инструмента,-а также сложность конструкции, вызванная необходимостью обеспечить достаточное число ступеней регулирования скорости и применением электродвигателя специального исполнения, обеспечивающего торможение при спуске. Указанные недостатки ухудшают экономические показатели работы бурового оборудования (увеличивается
время замены инструмента за счет неоптимальных скоростей подъема и спуска буровой колонны и т.д.), увеличивают габариты и стоимость буровых лебедок.
Целью изобретения является повышение производительности труда и упрощение конструкции лебедки за счет выбора оптимальной скорости подъема и опускания инструмента.
10
Для достижения этой цели уст ройство для изменения скорости включа.ет в себя кольцевой корпус и планетарную передачу с пересекающимися осями колес, водило которой связано
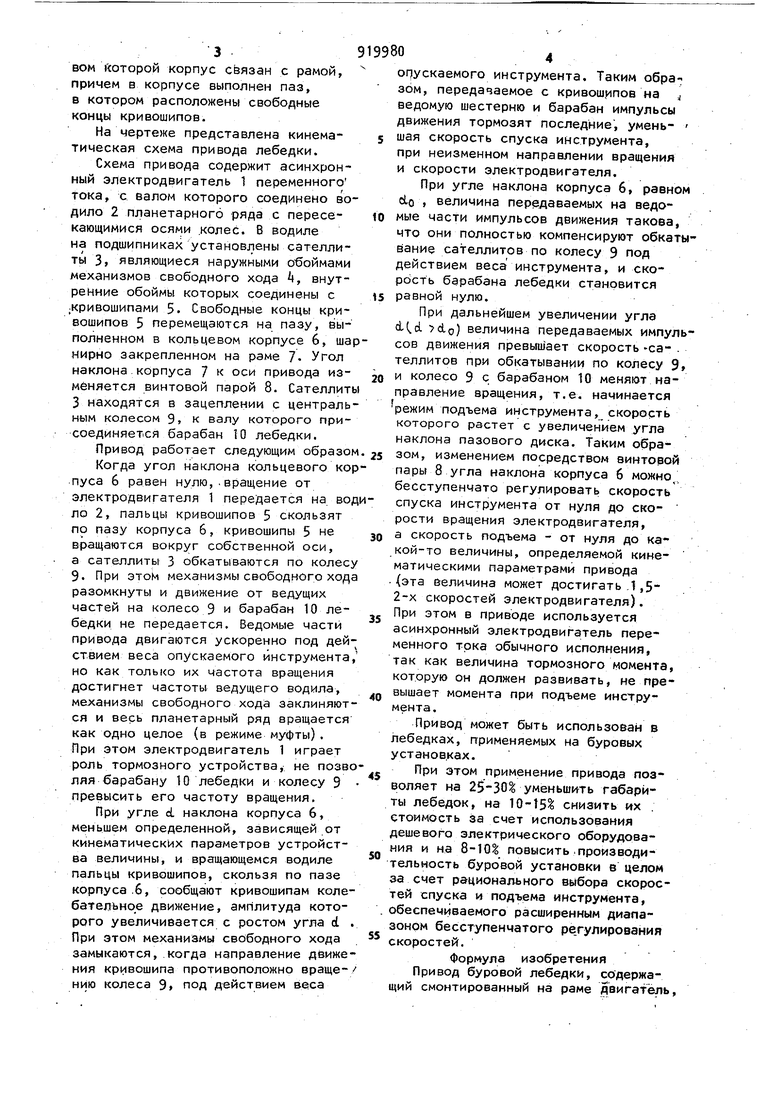
IS с двигателем, центральное колесо с барабаном, а каждый сателлит снабжен кривошипом и механизмом свободного хода, наружная обойма которо-. го закреплена в сателлите, а внут20ренняя на кривошипе, при этом корпус установлен с возможностью наклона относительно планетарной передами и снабжен винтовой парой, посредстBOM Гюторой корпус связан с рамой, причем в корпусе выполнен паз, в котором расположены свободные концы кривошипов. На чертеже представлена кинематическая схема привода лебедки. Схема привода содержит асинхронный электродвигатель 1 переменного Тока, с валом которого соединено водило 2 планетарного ряда с пересекающимися осями .колес. 8 водиле на подшипниках установлены сателлиты 3 являющиеся наружными обоймами механизмов свободного хода k, внутренние обоймы которых соединены с ;Кривошипами 5. Свободные концы кривошипов 5 перемещаются на пазу, выполненном в кольцевом корпусе 6, ша мирно закрепленном на раме 7- Угол наклона.корпуса 7 к оси привода изменяется винтовой парой 8. Сателлит 3 находятся в зацеплении с централь ным колесом 9, к валу которого присоединяется барабан 10 лебедки. Привод работает следующим образо Когда угол наклона кольцевого ко пуса 6 равен нулю,.вращение от электродвигателя 1 передается на во ло 2, пальцы кривошипов 5 скользят по пазу корпуса 6, кривошипы 5 не вращаются вокруг собственной оси, а сателлиты 3 обкатываются по колес 9. При этом механизмы свободного ход разомкнуты и движение от ведущих частей на колесо 9 и барабан 10 лебедки не передается. Ведомые части привода двигаются ускоренно под дей ствием веса опускаемого инструмента но как только их частота вращения достигнет частоты ведущего водила, механизмы свободного хода заклиняют ся и весь планетарный ряд вращается как одно целое (в режиме муфты). При этом электродвигатель 1 играет роль тормозного устройства, не позв ляя барабану 10 лебедки и колесу 9 превысить его частоту вращения. При угле d наклона корпуса 6, меньшем определенной, зависящей от кинематических параметров устройства величины, и вращающемся водиле пальцы кривошипов, скользя по пазе корпуса .6, сообщают кривошипам коле бательное движение, амплитуда которого увеличивается с ростом угла d При этом механизмы свободного хода замыкаются, .когда направление движе ния кривошипа противоположно вращенйю колеса 9 под действием веса 04 опускаемого инструмента. Таким образом, передачаемое с кривошипов на j ведомую шестерню и барабан импульсы движения тормозят последние, умень эя скорость спуска инструмента, при неизменном направлении вращения и скорости электродвигателя. При угле наклона корпуса 6, равном do , величина передаваемых на ведомые части импульсов движения такова, что они полностью компенсируют обкатыбание сателлитов по колесу 9 под действием веса инструмента, и скорость барабана лебедки становится равной нулю. При дальнейшем увеличении угла A(,d do) величина передаваемых импульсов движения превышает скорость са- . теллитов при обкатывании по колесу 9, и колесо 9 с барабаном 10 меняют направление вращения, т.е. начинается режим подъема инструмента, скорость которого растет с увеличением угла наклона пазового диска. Таким образом, изменением посредством винтовой пары 8 угла наклона корпуса 6 можно бесступенчато регулировать скорость спуска инструмента от нуля до скорости вращения электродвигателя, а скорость подъема - от нуля до какой-то величины, определяемой кинематическими параметрами привода (эта величина может достигать ,1,5 2-х скоростей электродвигателя). При этом в приводе используется асинхронный электродвигатель переменного тока обычного исполнения, так как величина тормозного момента, которую он должен развивать, не превышает момента при подъеме инструмента. Привод может быть использован в лебедках, применяемых на буровых установках. При этом применение привода позволяет на 25-30 уменьшить габариты лебедок, на 10-15% снизить их . стоимость за счет использования дешевого электрического оборудования и на 8-10 повысить-производительность буровой установки в целом за счет рационального скоростей спуска и подъема инструмента, обеспечиваемого расширенным диапазоном бесступенчатого регулирования скоростей. Формула изобретения Привод буровой лебедки, содержащий смонтированный на раме д вигатель,
связанный с барабаном через устройство для изменения скорости подъема м опускания инструмента, отличающийся тем, что, с целью .повышения производительности труда и упрощения конструкции лебедки за счет выборка оптимальной скорости подъема и опускания инструмента, устройство для изменения скорости включает в себя кольцевой корпус и планетарную передачу с пересекающимися осями колес, водило которой связано с двигателем, центральное ; колесо - с барабаном, а каждый сателлит снабжен кривошипом и механизмом свободного хода, наружная обой199806 .
ма которого закреплена в сателлите, а внутренняя на кривошипе, при этом корпус уЬтановлен с возможностью наклона относительно планетарной 5 передачи и снабжен винтовой парой, посредством которой корпус связан |С рамой, причем в корпусе выполнен .паз, в котором расположены свободные концы кривошипов. 10 Источники информации,
принятые во внимание при экспертизе
15 №176377, кя. В 66 D , 1962 (прототип)..
