(5) ЛИНЕЙНЫЙ ИНТЕРПОЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой линейный интерполятор | 2017 |
|
RU2661540C1 |
| Трехкоординатный линейный интерполятор | 1987 |
|
SU1437834A1 |
| Линейный интерполятор | 1985 |
|
SU1298714A1 |
| Линейный интерполятор | 1975 |
|
SU551610A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Линейный интерполятор | 1987 |
|
SU1439532A1 |
| Линейный интерполятор | 1979 |
|
SU888073A1 |
| Линейный интерполятор | 1986 |
|
SU1413603A1 |
| Линейный интерполятор | 1989 |
|
SU1674064A1 |
| Линейный интерполятор | 1991 |
|
SU1809421A1 |
1
Изобретение относится к автоматике и вычислительной технике.
По основному авт.св. № 551610 известен линейный интерполятор, содержащий регистру координатных приращений соединенные через блоки совпадения со входами сумматора, выход которого через блок анализа знака оценочной функции подключен к управляющим входам блоков совпадения, и блок анализа знака разности координатных приращений, вход которого подключен к выходу сумматора, а выходы - ко входам регистров координатных приращений ГПОднако это устройство характеризуется низкой точностью, обусловленной недостаточной Лэчностью аппроксимации.
Целью изобретения является повышение точности устройства.
Указанная цель достигается тем, что линейный интерполятор содержит регистр разности координатных приращений, причем вход блока анализа знака разности координатных приращений подключен к выходу сумматора через регистр разности координатных приращений.
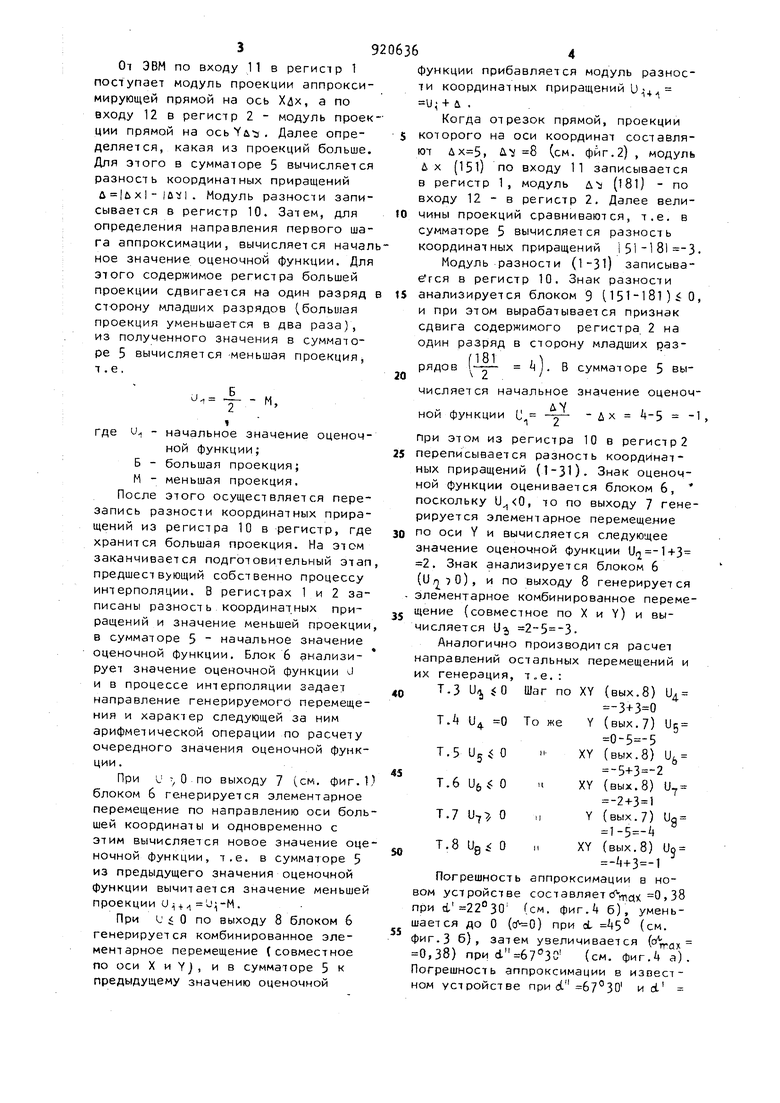
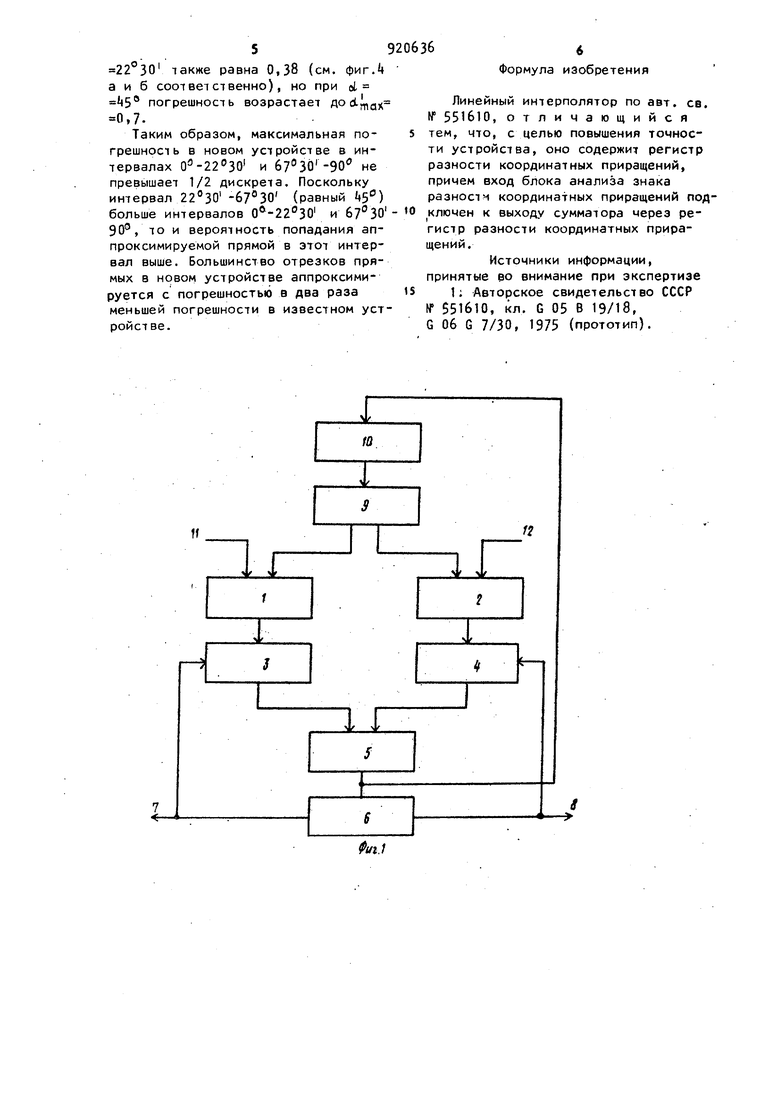
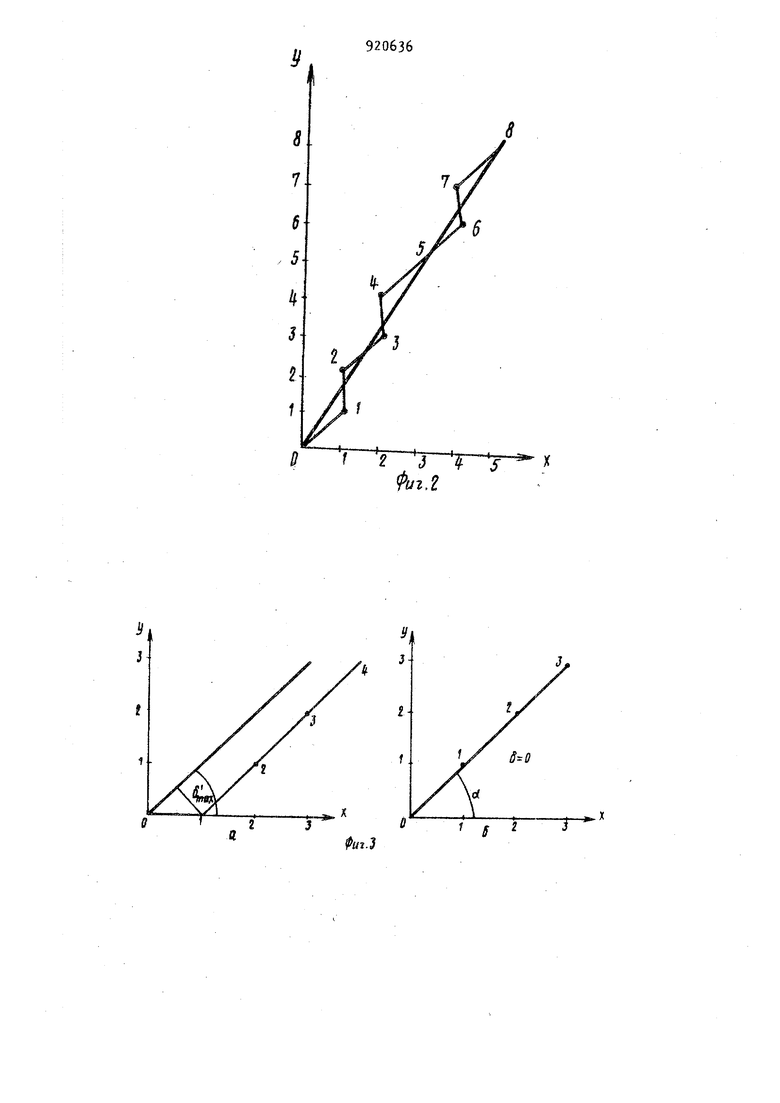
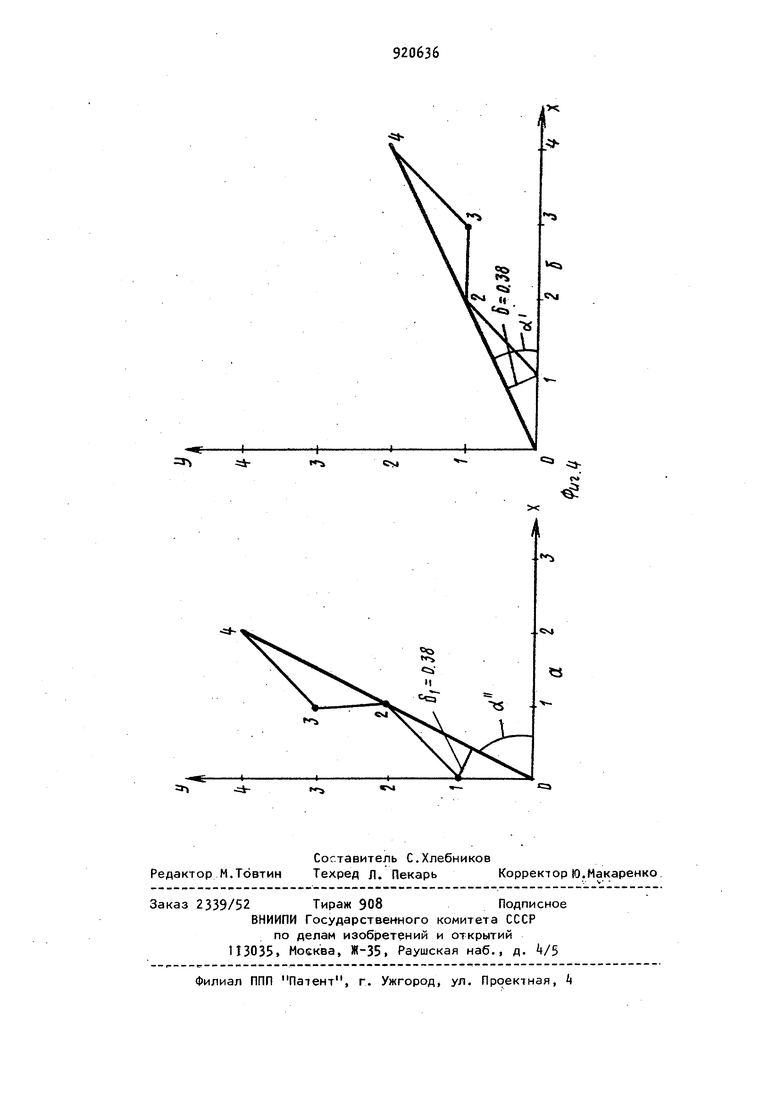
На фиг.1 изображена схема интерполятора; на фиг.2 - отрезок аппроксимируемой прямой; на фиг.З отрезки аппроксимируемых прямых для cL 45° а - для известного устройства, б - для нового интерполятора ; на фиг.4 - отрезки аппроксимируемых прямых а - для d , б - для d .
Линейный интерполятор содержит сдвиговые регистры координатных приращений 1 и 2, блоки совпадения 3 и 4, сумматор 5, блок анализа знака оценочной функции 6 с выходами 7 и 8, блок анализа знака разности ко,ординатных приращений 9 и регистр разности координатных приращений 0.
Интерполятор работает следующим Ьбоазом. От ЭВМ по входу 11 в регистр 1 поступает модуль проекции аппроксимирующей прямой на ось Xdx, а по входу 12 в регистр 2 - модуль проек ции прямой на ocbYu-s. Далее определяется, какая из проекций больше. Для этого в сумматоре 5 вычисляется разность координатных приращений U |Л X I - las I . Модуль разности записывается в регистр 10. Затем, для определения направления первого шага аппроксимации, вычисляется начал ное значение оценочной функции. Для этого содержимое регистра большей проекции сдвигается на один разряд сторону Uтaдшиx разрядов (болылая проекция уменьшается в два раза), из полученного значения в сумматоре 5 вычисляется -меньшая проекция. и -ii- - м 1 2 где и - начальное значение оценочной функции; большая проекция; меньшая проекция. После этого осуществляется перезапись разности координатных приращений из регистра 10 в регистр, где хранится большая проекция. На этом заканчивается подготовительный этап предшествующий собственно процессу интерполяции. В регистрах 1 и 2 записаны разность координат.ных приращений и значение меньшей проекции в сумматоре 5 начальное значение оценочной функции. Блок 6 анализирует значение оценочной функции О и в процессе интерполяции задает направление генерируемого перемеще ния и характер следующей за ним арифметической операции по расчету очередного значения оценочной функ ции . При и у О по выходу 7 (см. фиг. блоком 6 генерируется элементарное перемещение по направлению оси бол шей координаты и одновременно с этим вычисляется новое значение оц ночной функции, т.е. в сумматоре 5 из предыдущего значения оценочной функции вычитается значение меньше проекции Ui + J;;-M. При и О по выходу 8 блоком 6 генерируется комбинированное элементарное перемещение (совместное по оси X и YJ, и в сумматоре 5 к предыдущему значению оценочной 9 4 ункции прибавляется модуль разноси координатных приращений U - и , + л . Когда отрезок прямой, проекции которого на оси координат составлят , uif 8 (см. фиг.2) , модуль Дх (151) по входу 11 записывается в регистр 1, модуль дъ (I8l) - по входу 12 - в регистр 2, Далее величины проекций сравниваются, т.е. в сумматоре 5 вычисляется разность координатных приращений . Модуль разности (1-31) записываегся в регистр 10. Знак разности анализируется блоком 9 (,151-lBl)iO, и при этом вырабатывается признак сдвига содержимого регистра 2 на один разряд в сторону младших разflBT 1т . В сумматоре 5 вычисляется начальное значение оценоч- Дх А-5 -1, НОЙ функции и при этом из регистра 10 в регистр 2 переписывается разность координатных приращений (1-31). Знак оценочной функции оценивается блоком 6, поскольку , то по выходу 7 генерируется элементарное перемещение по оси Y и вычисляется следующее значение оценочной функции 2. Знак анализируется блоком 6 (и 7 о), и по выходу 8 генерируется элементарное комбинированное перемещение (совместное по X и Y) и вычисляется и . Аналогично производится расчет направлений остальных перемещений и их генерация, т.е.: Шаг по XY (вых.8) Т.А и 0 У (вых.7) U5 XY (вых.8) XY (вых.8) и. Y (вых. 7) Ug . а Ug ; о XY {вых.8) Uo -г. Погрешность аппроксимации а новом устройстве составляет tfvncoc 0 38 при d, 22°30 (см. фиг. б), уменьшается до О (с(0) при dL 45° (см. фиг.З б), затем увеличивается (,; 0,38) при d 67°3C (см. фиг.4 а). Погрешность аппроксимации в известном устройстве при dl 67°30 и d 22°30 также равна 0,38 (см. фиг. а и б соответственно), но при d 45° погрешность возрастает до diflgx 0,7. Таким образом, максимальная погрешность в новом устройстве в интервалах 0 -2230 и 67°30-90 не превышает 1/2 дискрета. Поскольку интервал 22°30 -67°30 (равный kS°) больше интервалов 0 -2230 и 90®, то и вероятность попадания аппроксимируемой прямой в этот интервал выше. Большинство отрезков прямых в новом устройстве аппроксимируется с погрешностью в два раза меньшей погрешности в известном устройстве.
ff
12 Формула изобретения Линейный интерполятор по авт. св. № 551610, отличающийся тем, что, с целью повышения точности устройства, оно содержит регистр разности координатных приращений, причем вход блока анализа знака разности координатных приращений подклсчен к выходу сумматора через регистр разности координатных приращений. Источники информации, принятые ео внимание при экспертизе 1: Авторское свидетельство СССР (f 551610, кл. G 05 В 19/18, G 06 G 7/30, 1975 (прототип).
920636
