2
/5
i
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный интерполятор | 1991 |
|
SU1809421A1 |
| Линейный интерполятор | 1987 |
|
SU1439532A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Цифровой линейный интерполятор | 1990 |
|
SU1805449A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Линейный интерполятор | 1985 |
|
SU1298714A1 |
| Линейный интерполятор | 1988 |
|
SU1522157A1 |
| Многокоординатный цифровой интерполятор | 1986 |
|
SU1315939A1 |
| Графический интерполятор | 1985 |
|
SU1401509A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1693592A1 |
Изобретение относится к вычислительной технике. Цель изобретения - повышение надежности за счет контроля работы за время интерполяционного цикла. Линейный интерполятор содержит сдвиговый регистр 1 координатного приращения, регистр 2 разности координатных приращений, регистр 3 координатных приращений, счетчик 4, мультиплексор 5, ключ 6, накапливаю- щий сумматор 7, схему 8 сравнения и блок 9 управления. В интерполяторе используется метод оценочной функции. 2 3.п.ф-лы, 6 ил. 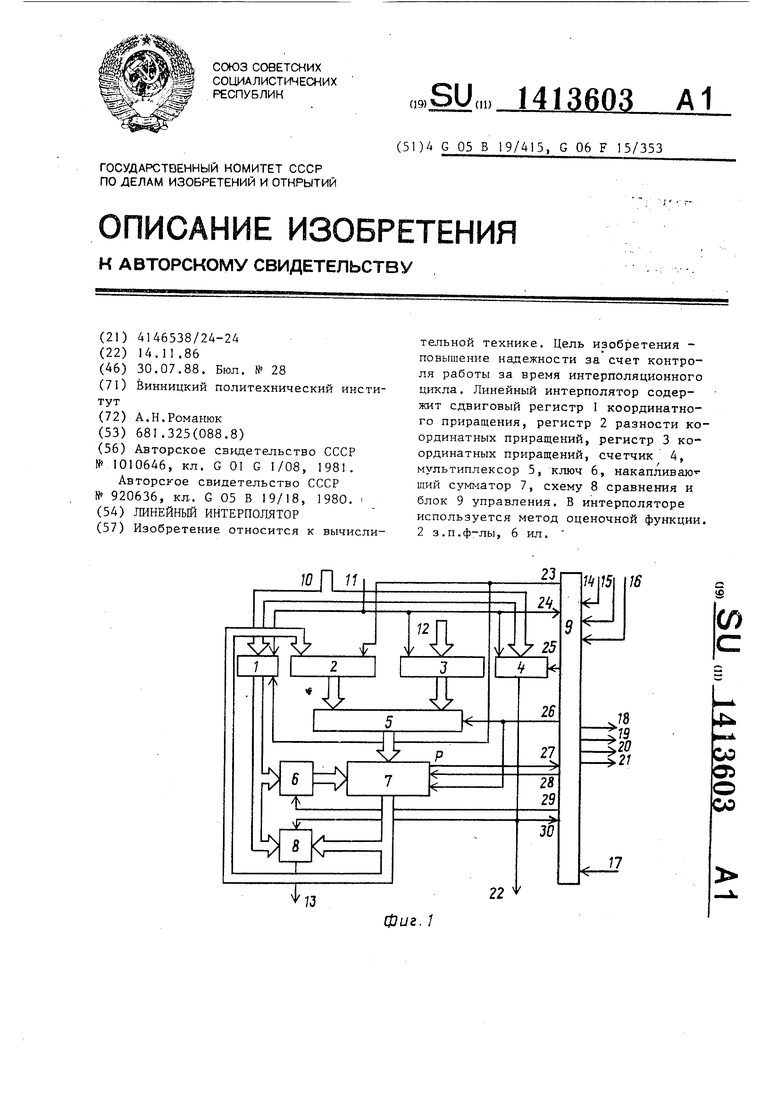
О5 О
00
фиг. 7
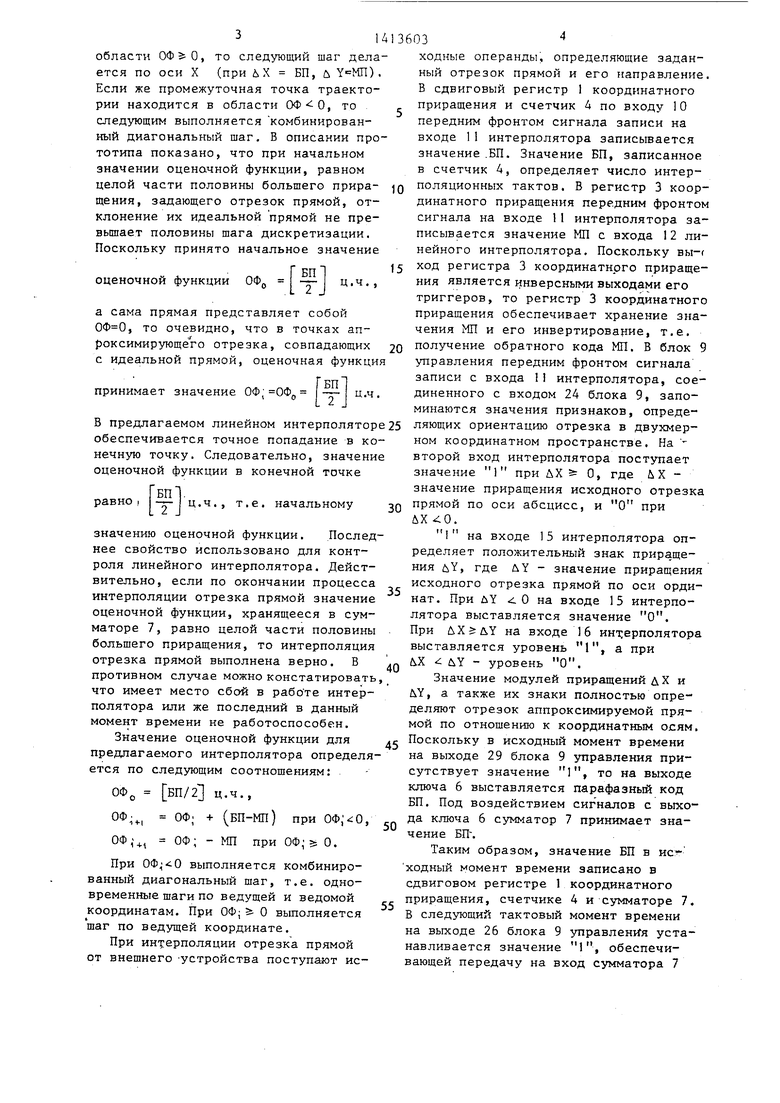
Изобретение относится ,/ автоматике и вычислительной технике и предназначено для использования в системах числового программного управления р а также в системах отображения графической информации.
Цель изобретения - повышение надежности за счет контроля работы за время интерполяционного цикла.
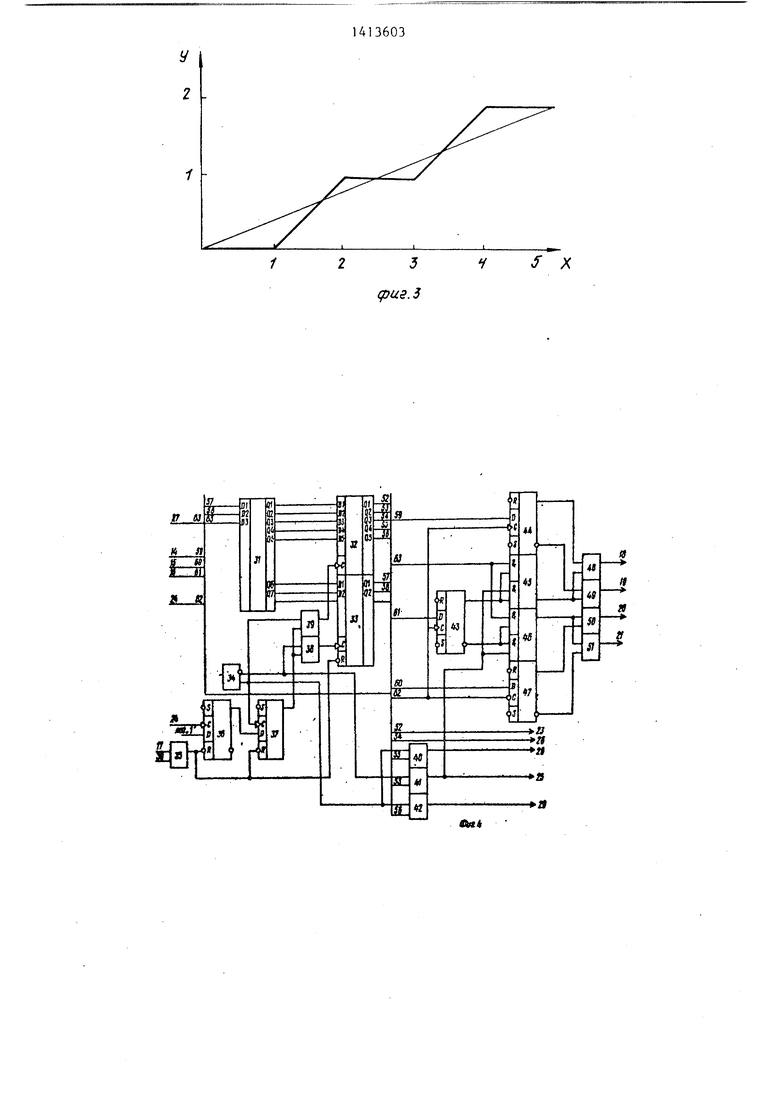
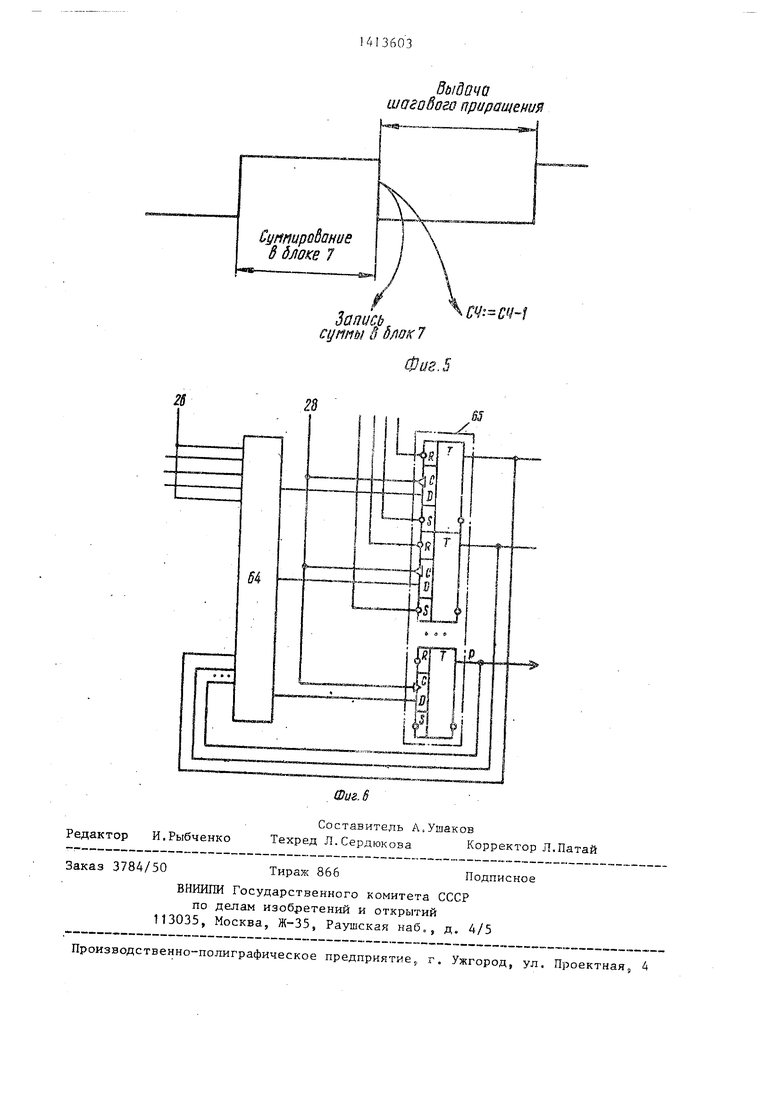
На фиг,1 приведена функциональная схема линейного интерполятораj на фиг.2 - блок-схема алгоритма работы устройства; на фиг.З - отрезок ап- проксимируемой прямой; на фиг.4 функциональная схема блока управления; на фиг.З - распределение управляющих воздействий на фиг.6 функциональная схема накапливающего сум матора..
Линейньгй интерполятор (фиг . 1) держит сдвиговый регистр 1 координатного приращения, регистр 2 разности координатных приращений, р.егистр 3 координ 1т.ного приращенияS счетчик 4s мультиплексор 5, ключ 6, накапливающий cyMNjarop 7, схему 8 сравнения, блок 9 управления. Интерполятор имеет входы 10-12, выход 13, входы 14 17 и выходы 18-22.
Сдвиговый -регистр координатного приращения служит для хранения большего приращения (вп), задающего исходный отрезок прямой. Значение БП поступает от внешнего устройства по входу 10 значения БП5 а запись в регистр 1 осзтцествляется передним фронтом сигнала записи, поступающего на /вход 11 запуска интерполятора. Значение БП в исходный момент времени за пнсывается также в счетчик 4, выполняющий функцию счетчика конца интерполяции отрезка прямой.
Регистр 2 разности координатных приращений служит для хранения разно ,сги большего и меньшего приращений, задающих отрезок прямой. Указанная разность поступает с накапливающего сумматора 7 и записывается в регистр 2 передним фронтом сигнала,. поступа- ющего с первого выхода 23 блока 9 уп ра;вления.
Регистр 3 координатного приращени служит для хранения меньшего приращения (МП), задающего отрезок аппрокси мнруемой прямой. Запись в регистр 3 осуществляется передним фронтом сигнала, поступающего с входа 1 интерполятора,,
Q
5 0
5 Q
„
5 о
с
5
Мультиплексор 5 обеспечивает передачу ia свой выход инверсного значения Ш от регистра 3 при наличии 1 на его управляющем входе, соединенном с входом переноса накапливающего сумматора 7, При наличии О на управляющем входе мультиплексора 5 последний осуществляет передачу значения разности приращений от регистра 2 на свой вь:(ход.
Ключ 6 при наличии 1 на его управляющем входе обеспечивает передачу инверсного значения БП со своего ин-; форг-1ационного входа на выход. Инфор- мационьшй вход ключа 6 подключен к па- рафазным выходам сдвигового регистра 1 координатного приращения, а выход - к пходам начальной установки накапли- валоще:го cyMi iaTOpa 7.
Елок 9 управления осуществляет управление операциониьми узлами интерполятора в соответствии с алгоритмом работы,
Блок 9 управления (фиг.4) имеет выводы (входы и выходы) 23-30 и содержит блок 3 постоянной памяти, первый 32 и второй 33 регистры, генератор 34 импульсов, первый элемент И 35s первый 36 и второй 37 триггеры, второй 38э третий 39, четвертый 40j пятый 41 и шестой 42 элементы И, третий 43 и четвертый 44 триггеры первый 45 и второй 46 злакенты 2И-ИЛИ. пятый триггер 47, седьмой 48з восьмой 49, девятый 50 и десятый 51 элементы И, Позициями 52-63 обозначены связи в блоке 9 через шину. Сумматор 7 (фиг.6) содержит комбинационный сумматор 64 и регистр 65.
Интерполятор работает следующим образом.
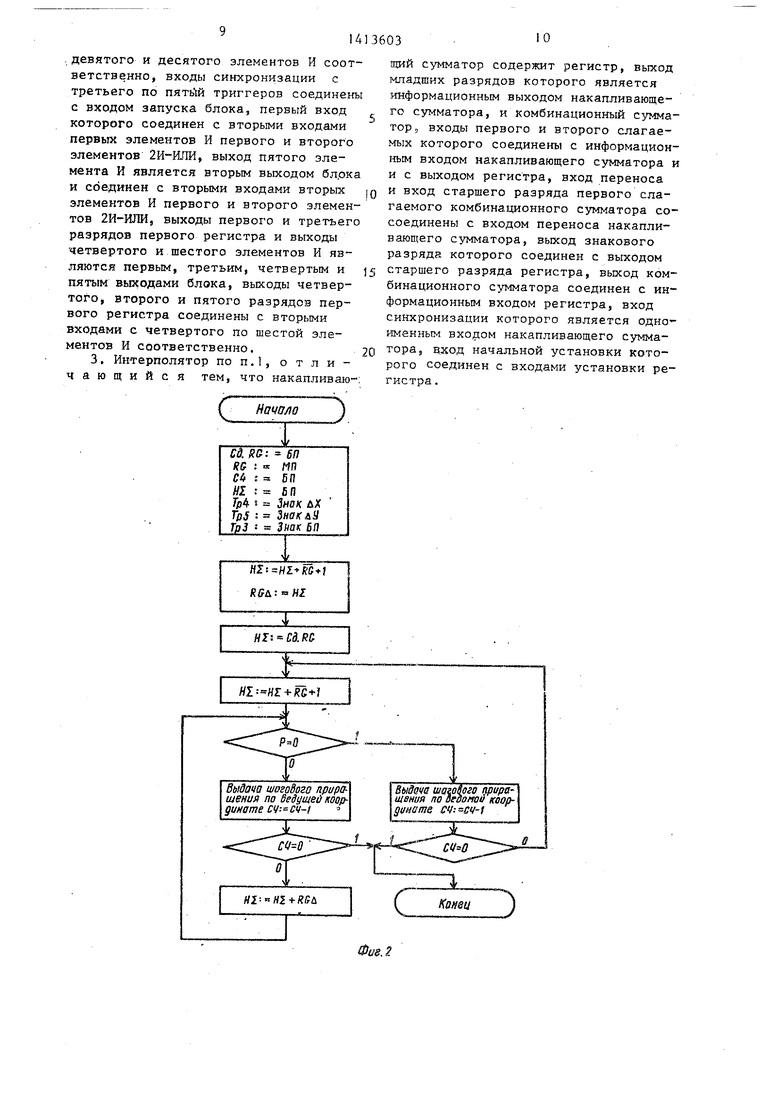
В качестве метода линейной интерполяции цля предлагаемого линейного интерполятора используется метод оценочной функции, согласно которому направление очередного шага направляется по знаку специальной оценочной функции (ОФ), вычисляемой в процес се интерполяции. Интерполируемая прямая делит двухмерное координатное пространство, в котором она расположена, на две области: область над прямой и область ОФ О под прямой. Сама прямая представляет собой область ОФ О. Интерполяция ме- - тодом оценочной функции производится по следующему правилу: если промежуточная точка траектории находится в
области , то следующий шаг делается по оси X (при iX БП, U ) . Если же промежуточная точка траектории находится в области , то следующим выполняется комбинированный диагональный шаг. В описании прототипа показано, что при начальном значении оценачной функции, равном целой части половины большего приращения, задающего отрезок прямой, отклонение их идеальной прямой не пре- вьшгает половины шага дискретизации. Поскольку принято начальное значение
оценочной функции ОФ„
if
Ц.ч. ,
а сама прямая представляет собой , то очевидно, что в точках ап- роксимирующе го отрезка, совпадающих с идеальной прямой, оценочная функция
принимает значение ,
БП 2
в предлагаемом линейном интерполяторе 25 обеспечивается точное попадание в конечную точку. Следовательно, значение оценочной функции в конечной точке
равно
ГБП. .-..
т.е. начальному
значению оценочной функции. Последнее свойство использовано для контроля линейного интерполятора. Действительно, если по окончании процесса интерполяции отрезка прямой значение оценочной функции, хранящееся в сумматоре 7, равно целой части половины большего приращения, то интерполяция отрезка прямой выполнена верно. В противном случае можно констатировать что имеет место сбой в работе интерполятора или же последний в данный момент времени не работоспособен. Значение оценочной функции для предлагаемого интерполятора определяется по следующим соотношениям:
ОФ БП/2 ц.ч.,
ОФ; + (ВП-МП) при ОФ,.0,
ОФ, ОФ; - МП при ОФ; : 0.
При .О выполняется комбинированный диагональный шаг, т.е. одновременные шаги по ведущей и ведомой координатам. При ОФ; 5. О выполняется шаг по ведущей координате.
При ин ;:ерполяции отрезка прямой от внешнего -устройства поступают ис
10
15
я
20
е 25 е
,
413603
ходные операнды, определяющие заданный отрезок прямой и его направление. В сдвиговый регистр 1 координатного приращения и счетчик 4 по входу 10 передним фронтом сигнала записи на входе 11 интерполятора записывается значение .БП. Значение БП, записанное в счетчик 4, определяет число интерполяционных тактов. В регистр 3 координатного приращения передним фронтом сигнала на входе 11 интерполятора записывается значение МП с входа 12 линейного интерполятора. Поскольку вы-г ход регистра 3 координатного приращения является инверсными выходами его триггеров, то регистр 3 координатного приращения обеспечивает хранение значения МП и его инвертирование, т.е. получение обратного кода МП. В блок 9 управления передним фронтом сигнала записи с входа 11 интерполятора, соединенного с входом 24 блока 9, запоминаются значения признаков, определяющих ориентацию отрезка в двухмерном координатном пространстве. На второй вход интерполятора поступает значение при ДХ О, где & X - значение приращения исходного отрезка прямой по оси абсцисс, и О при .
1 на входе 15 интерполятора определяет положительный знак приращения uY, где ЛУ - значение приращения исходного отрезка прямой по оси ординат. При uY 1 О на входе 15 интерполятора выставляется значение О. При ДХгдУ на входе 16 инт;ерполятора выставляется уровень 1, а при U.X -i ЛУ - уровень О.
Значение модулей приращений ДX и , а также их знаки полностью определяют отрезок аппроксимируемой прямой по отношению к координатным осям, дс Поскольку в исходный момент времени
30
35
40
50
55
на выходе 29 блока 9 управления присутствует значение 1, то на выходе ключа 6 выставляется парафазный код БП. Под воздействием сигналов с выхода ключа 6 сумматор 7 принимает значение БПч
Таким образом, значение БП в исг ходный момент времени записано в сдвиговом регистре 1 координатного приращения, счетчике 4 и сумматоре 7. В следующий тактовый момент времени на выходе 26 блока 9 управления устанавливается значение 1, обеспечивающей передачу на вход сумматора 7
5j
инверсного значения МП с. вьпсода регистра 3 координатного приращения через мультиплексор 5.. На вход переноса сумматора 7 поступает значение 1. поскольку вычитание в сумматоре 7 ;. осуществляется в дополнительном КОДЕ В сумматоре 7 находится значение выражения
U - БП 1МП БП МЛ -I- 1 .
Значение : А запоминается в регистре 2 разности координатнь Х прираще- ннй, Уровень сигнала3 записанного в регистр 2; - пололдат&льный; В указакШ й тактовый момент времени осуществляется также сдвиг содержимого сдвк-- гового регистра 1 координатного ращения в сторону младших разрядов,. Поскольку до выполнения указанного дайствия в регистре 1 хранилось знг-; чгние БП, то после выполг-шння указан ной операции сдвига регистр прики- ка&г значение BI1/2 J ц,ч,
В следующий тактовый момент врамени на выходе. 29 блока 9 управления у&танавливается значение что обеспечивает установку суь матора 7 в состояние ГБП/2П д.ч„„ Указанные дей СТВИ.Я предшествуют собственно процес су интерполяции и образуют цикл под/готовки. Причем в регистре 3 координатного приращения хранится знач ев:и МП,, в счетчике 4 - значение БП, в регистре 2 разности координатных прирг - разность БП-МТ1; а s сумматора 7 и регистре 1 координатного прираще ния - значение БП/22 ц.. Цикл подготовки занимает три тактовых моменто времени.
В цикле интерполяции в первый так-- товый момент времени из содер.кимогс с умматора 7 вычитается значение Jin, т.е. обеспечивается п-ередача инверсного значения МП через мультиплексор 5 на информационный вход сумматора 1 и на его вход переноса выставляется значение 1. Следует отметить, что поскольку по алгоритму работы предлагаемого линейного интерполятора при вычислении значения оценочной функции используется операция вычитания только значения МП то сигнал переноса для накапливающего сумматора 7 формируется только при формировании для мультиплексора 5 сигнала передачи на его выход значения Ш.
При отрицательном значении оценочной функции, хранящейся в сутчматоре 7
036
к содержимому сумматора прибавляется значение БП-МП, хранящееся в регистре 2, Передача значения БП-МБ на информацион-
ный вход сумматора 7 достигается подачей
-
на управляющий вход мультиплексора 5
О, При положительном знаке оценочной функции( хранящейся в сумматоре 7, от содержимого последнего вычитается
значение МП.
Указанные действия совершаются за тактовый момент времени, в каждом из которых формируются шаговые прираще-7 в:ия. Значение шаговых приращений определяются значением знаков приращений йХз uY, соотношением приращений Ь-Х к uYs а также знаком оценочной функции8 хранящейся в сумматоре 7. В цикле интерполяции с каждым шаr oiibJK приращением по ведущей координате содержимое счетчика 4 уменьшает- пя на единицу. При выдаче числа шаго- вы, приращений по ведущей координа- :&; равного БП на выходе счетчика 4
формируется уровень О, сигнализирующий об окончании интерполяции отрезка прямой. Указанным уровнем разрешается работа схемы 8 сравнения. При равенстве содержимого суг-татора 7 зкаченио содержимого сдвигового регистра 1 на зькоде схемы 8 сравнения появляется уровень Г г сигнализирукз- эгяй о правильности выполнения аппрок- С1гмирующих действий по расчету оце- .
ночной функции за время интерполяционного цикла. В противном случае на выходе схемы 8 сравнения формируется уровень О, который лсазьшает или на неисправность интерполятора, или на
налигчие сбоев в его работе.
Формула изобретения
1, Линейный интерполятор, содержа- 1ций сдвиговый регистр координатного приращения5 ключ, накапливающий маторг регистр разности координатных приращений, информационный вход кото- роге соединен с информационньм выхо- дом накапливающего сумматора, вход начальной установки которого соединен с Е;ЫХОДОМ ключа, информационный вход которого соединен с выходом сдвигового регистра координатного приращения, отличающийся тем, что, с целью повышения надежности за счет 1сонтроля работы за время интерполяционного цикла, в него введены регистр координатного приращения, счетчик,
мультиплексор, схема сравнения и блок управления, информационные входы сдвигового регистра координатного приращения и счетчика соединены с вхо- дом значения большего приращения интерполятора, информационный вход регистра координатного приращения соединен с входом значения меньшего приращения интерполятора, выходы регистра разности координатных приращений и регистра координатного приращения соединены с первым и вторым информационными входами мультиплексора, выход которого соединен с информацион- ным входом накапливающего сумматора, выход которого соединен с первым информационным входом схемь сравнения, второй информационный вход которой соединен с выходом сдвигового регистра координатного приращения, вход запуска интерполятора соединен с входами записи сдвигового регистра координатного приращения, регистра координатного приращения и счетчика и с вхо дом запуска блока управления, первый выход которого соединен с входом записи регистра разности координатных приращений и с входом управления сдвигом сдвигового регистра координатного приращения, второй выход блока управления соединен со счетным входом счетчика, выход признака нулевого сог состояния которого соединен с выходом признака Конец интерполяции интерполятора, с первым входом начальной установки блока управления и входом стробирования схемы сравнения, вьшод признака равенства которой является выходом признака Отсутствие ощибки интерполятора, третий выход блока управления соединен с управляющим входом мультиплексора и входом переноса накапливающего сумматора, выход знакового разряда которого соединен с первым входом блока управления, четвертый и пятый выходы которого соединены с входом синхронизации накапливающего сумматора и управляющим входом ключа соответственно, с второго по четвертый входы блока управления являются входами знака приращения первой и второй координат и входом признака координаты с больщим приращением интерполятора, выходы координатных приращений которого соединены, с щестого по девятый выходами блока управления, второй вход начальной установки которого является входом
ю )5 20 25 зоQ дг
35
50
5
начальной установки интерполято - :ра.
, девятого и десятого элементов И соответственно, входы синхронизации с третьего по пятйй триггеров соединены с входом запуска блока, первый вход которого соединен с вторыми входами первьос элементов И первого и второго элементов 2И-ИПИ, выход пятого элемента И является вторым выходом бл.ока и соединен с вторыми входами вторых элементов И первого и второго элементов 2И-ИЛИ, выходы первого и третьего разрядов первого регистра и выходы четвертого и шестого элементов И являются первым, третьим, четвертым и пятым выходами блока, выходы четвертого, второго и пятого разрядов первого регистра соединены с вторьпу1и входами с четвертого по шестой элементов И соответственно.
Г Начало J
6П
МП бП
fin Знак дх
ЗнакА Знак БП
.Hl
«r
wi.
Выдача шогоёаго приращения по Bedyaiei) координате
щий сумматор содержит регистр, выход младших разрядов которого является информационным выходом накапливающего сумматора, и комбинационный сумматор, входы первого и второго слагаемых которого соединены с информационным входом накапливающего сумматора и и с выходом регистра, вход переноса и вход старшего разряда первого слагаемого комбинационного сумматора со- соединены с входом переноса накапливающего сумматора, выход знакового разряда которого соединен с выходом старшего разряда регистра, выход комбинационного сумматора соединен с ин- формационньм входом регистра, вход синхронизации которого является одноименным входом накапливающего сумматора, вход начальной установки которого соединен с входами установки регистра .
1 S Л
6 дмке 7
опш. „ супим 8 оflaк 7
Выдачи шагоВого приращение
Фиг. 5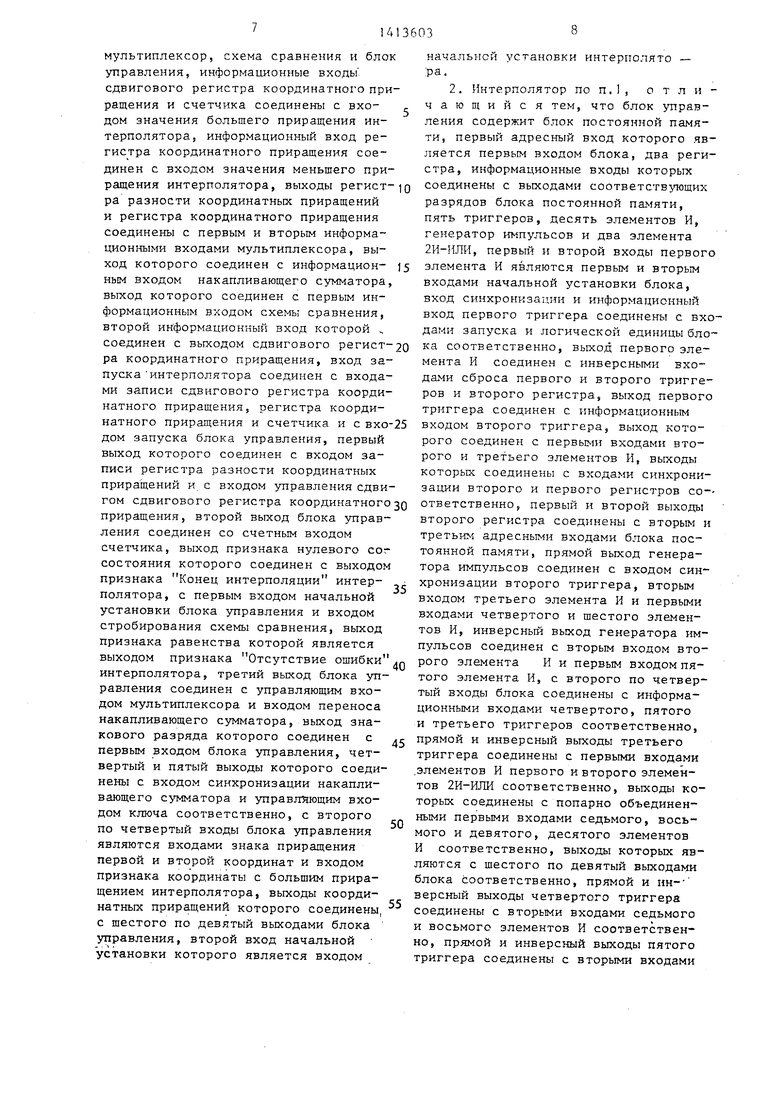
| Генератор векторов | 1981 |
|
SU1010646A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Линейный интерполятор | 1980 |
|
SU920636A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
