(54) ЛИНЕЙНЫЙ ИНТЕРПОЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Интерполятор | 1988 |
|
SU1541557A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Интерполятор | 1987 |
|
SU1413602A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Линейный интерполятор | 1987 |
|
SU1439532A1 |
| Линейный интерполятор | 1985 |
|
SU1298714A1 |
| Устройство для контурного программного управления станком | 1978 |
|
SU716020A1 |
| Линейный интерполятор | 1989 |
|
SU1674064A1 |
| Многокоординатный цифровой интерполятор | 1984 |
|
SU1200246A1 |
1
Изобретение относится к автомати|Ке и вычислитеяьной технике и предназначено для использования в системах управления технологическими процессами в функции времени, в частности термическими печами.
Известен линейный интерполятор . с оценочной функцией, принцип работы которого слудуюший: каждому шагу в направлении любой из двух осей координат предшествует вь1числение оценочной функции. Если при этом знак оце- . ночной функции не меняется, то вырабатьтается управлякший сигнал шага по той же оси координат с максимальной ценой дискретности, в предлагаемом устройстве - удвоенной. В случае изменения знака оценочной функции, вырабатывается укороченный, дробный шаг в том направлении и происходит переключение триггера, а вместе с этим изменение направления следукяпего шага. Процесс продолжается до совпадения текущих и конечных координат от, резка интерполяции. После чего от блол1
ка прсжраммы поступают данные об очередном участке интерполяции.
Недостатками известиого интерполятора являются сложность схемы и недостаточно высокое быстродействие, связанное с тем, что аьписление оценочнойфункшш производится после ,кажаого шага по одной из координат, а также
10 из-эа необходимости контроля конца кадров по двум координатам.
Наиболее к изобретению техническим решением является линейный интерполятор, содержащий сумматор, к пер15. вому входу которого подключены выходы параллельных цепей, каждая из которых состоит из включенных последовательно первого элемента И, регистра и вторся о элемента И, причем первые
20 входы всех первых элементов И подклк чены к входу устройства и выходу сумматора, второй выход которого и выход генератора тактовых импульсов соединены с входами третьего элемента И, а другие входы первых и вторых элементов И и вторые входы сумматора подключены к первому выходу блока управления, соединенного первым входом с вторыми выходами сумматора.. Наличие в схеме интерполятора блока анализа разности координатных приращений, вход которого подключен к выходу сумматора, а выходы к входам регистров (координатных прирашений), позволяет ускорить процесс интерполяции, всегда сопровождая элементарное перемещение вдоль проекши перемещением вдоль большей проекции, совместив и операции по расчету оценочной функции. При этом определение значения оценочной функции зависит от того, какое координатное приращение является наибольшим (т, е. от знака разности координатных приращений)2j. Однако полная схема такого линейного интерполятора довольно сложна, а функциональные возможности и быстродействие недостаточны.
Целью изобретения является упрощение устройства.
Поставленная цель достигается тем. что в известный линейный интерполятор, содержащий сумматор, к первому входу которого подвлючены выходы параллельных цепей, каждая из которых состоит из включенных последовательно первого элемента И, регистра и второго элемента И, причем первые входы всех первых элементов И подключены к входу устройства и первому выходу сумматора, второй выход которого и выход генератора тактовых импульсов соединены с входами третьего элемента И, а другие входы первых и вторых элементов И и вторые входы сумматора подключены к первому выходу блока управления, соединенного первым входом с вторым выходом сумматора, введены триггер и четвертые элементы И, входы которых подключены к выходу третьего элемента И, и через триггер - к входам соответствущего регистра, а выходы - к вторым вхдам блока управления, второй выход которого соединен с третьим входом сумматора, блок управления содержит вклю.ченные последовательно первый регистр, дешифратор, первый элемент памяти и преобразователь кода, первый и второй выходы которого соединены соответствено с первым и вторым выходами блока управления, а третий выход подключен к первому входу преобразователя адреса, соединенного вторым входом через включенные последовательно вторые регистр и элемент памяти с выхода дешифратора, а остальные входами - с входами блока управления, первый вход которого и выход преобразователя адреса соединены с входами первого регистра.
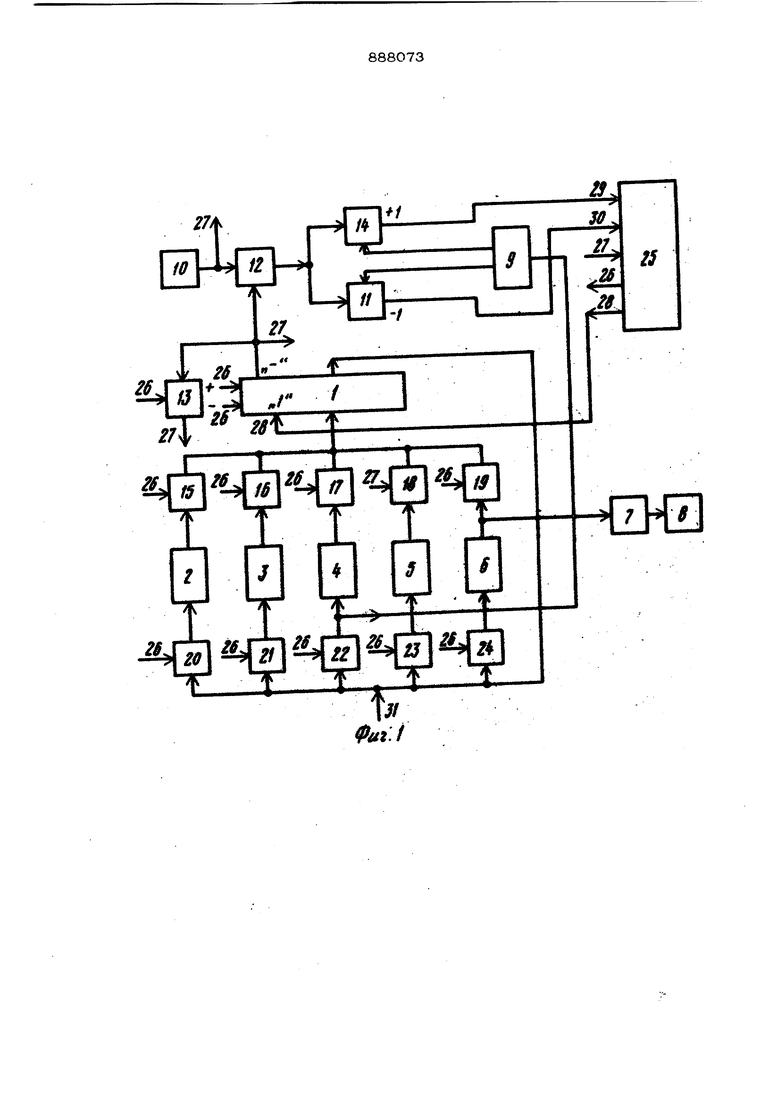
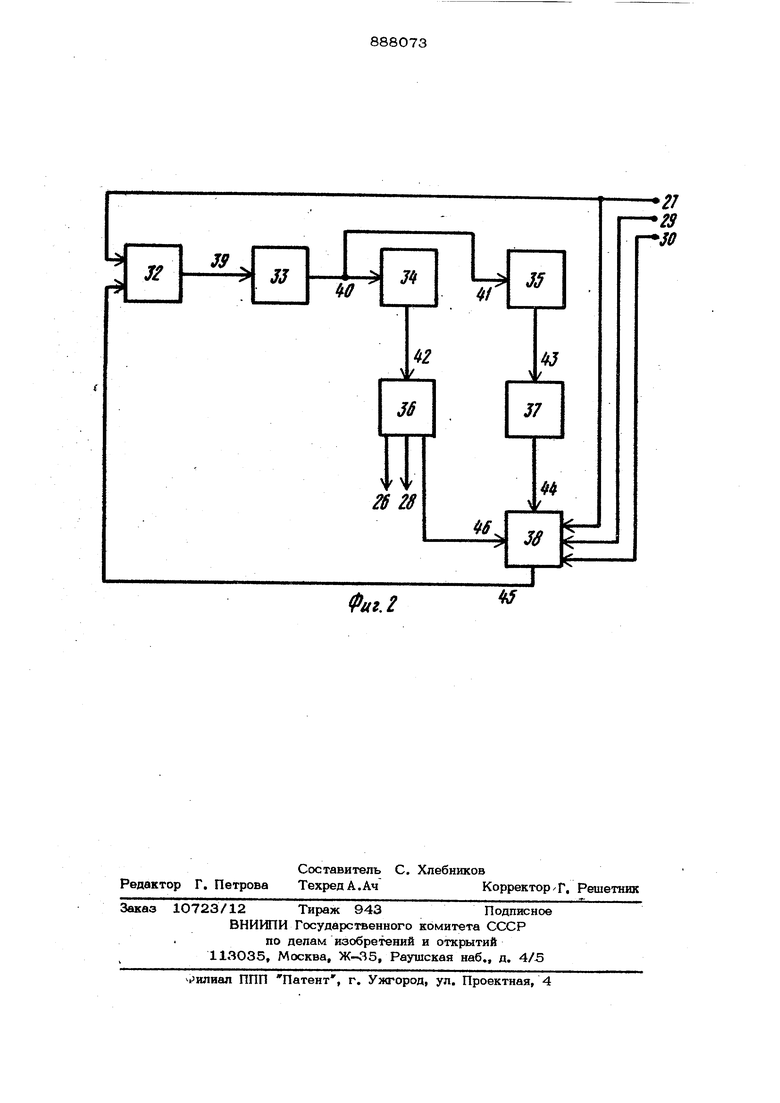
На фиг. 1 изображена функциональная схема устройства; на фиг. 2 - схема управления.
Устройство содержит сумматор (комбинационный) 1, регистр 2 для хранения оценочной функции Jl, регистр 3 разности координатных Приращений 3, регистр 4 координатного приращения по оси регистр 5 для хранения конца кадра по , координате Ь , регистр 6 текущего значения, преобразователь код-аналог 7, фиксатор 8, триггер (знака координатного приращения )( ) 9, генератор 10 тактовых импульсов, элементы И (схемы совпадения) 11-24, блок 25 управления с первыми выходом и входом 26 и 27 и вторым выходом и входом 28, 29 и 30, информационный вход 31, блок 25 содержит первый регистр (адреса микрокоманды) 32, дешифратор (адреса микрокоманды) 33, первый элемент памяти (память микроопераций) 34, второй элемент памяти (память переходов) 35, преобразователь кода (микрокоманды) 36, второй регистр (перехода) 37, преобразователь адреса (блок модификации адреса перехода) 38, связи 39- 46.
Интерполятор работает следующим образом.
Пусть задан отрезок прямой, проекции которого на оси координат составляют, например, Л X 5, ЛЬ 8. Превышение
координатного приращения по оси X является характерным для рассматирваемо- го интерполятора /Afc/ //ДХ/, т. е. (of(arcig-uX/A-fc)-SoL 45, благодаря соответствующему выбору дискрет
по обеим координатам :.
I дискрета X дискрета t j--- ;
где за о1- принимается угол наклона самого -крутого из всех кадров, а диск0 рета )(, - меньше или равна допустимой погрешности по X. Указанный способ выбора дискреты по -fe обеспечивает отсутствие приращения, большего заданной дискреты по У . Если принять ту и дру5 гую дискрету за единичное приращение, то о(. -6 45.
Итак, через вход 31, элементы И 20-24 заполняются исходной информа5шей регистры 2-6. Регистр 2 при этом находится в нулевом состоянии, а в регистры 3-6 заносятся соответственно разность координатных приращений At-A координатное приращение А X, координатное приращение Д-t, начальное значение У , Содержимое регистров 2, 5, 6 в процессе работы меняется в определенной последовательности посредством комбинационного сумматора 1, вход и выход которого через управляемые элементы И 15, 18, 19 и 20, 24 связаны соответственно с входами и выходами этих регистров. При этом соблюдается следующая последовательность: прежде всего производится анализ знака оценочной функции, хранящейся предварительно в регистре 2 и переписанной в сумматор 1 через элемент И 15 Так как в рассматриваемом интерполяторе всегда i t/ /|u;i|jJj(45), то порядок выполнения операций и дальнейшее вьмисление оценочной функции происходит в соответствии с формулами при V ij О приращение по -t и v.,,.-V..Mx/ при V , - о приращение по fc и X и ,, Таким образом, в зависимости от знака одиночной функции вырабатываются управляющие сигналы, которые посту пают с выхода 26 блока 25 на соответ ствующие управляющие входы элементов И 15-24, в результате содержимое регистров 6 увеличивается (уменьшается, если ) на 1 при О, а содержимое регистра 5 уменьшается на 1 каждый раз, независимо от знака оценочной функции, т. е, перемещение по меньщей проекции - X всегда сопровождается перемещением по больщей t, Вс вычисления, как указывалось выше, про изводятся в сумматоре, управляемом через входы сложения, вычитания (+,-) и записи эдйницы в сумматоре соответственно с выходов 26 и 28 блока 25 вновь записываются в соответствующие регистры. Вслед за изменением координат снова вычисляется оценочная функ ция в сумматоре 1 сложением содержим го регистра 2 с содержимым регистра 3 или вычитанием из содержимого регистра 2 содержимог о регистра 4, в зависимости от того, какие, произошли координатные изменения. Новое значени оценочной функции вновь записьшается в регистр 2, а знак ее поступает через 73 ; вход 27 в блок 25 для выработки соответствующий управляющих сигналов, и цикл повторяется. Текущее значение координаты X преобразуется блоком 7 в аналог и отражается на фиксаторе 8. Контроль конца интерполяции всегда определяется всегда по координате -Ь , для этото содержимое регистра 5 после каждого анализа знака оценочной функции уменьщается на 1. При последнем вычитании 1, когда знак в сумматоре 1 меняется на отрицательный, с выхода знакового разряда в элемент И 13 поступает 1, в результате чего на выходе блока 13 вырабатывается сигнал конца интерполяции на данном участке (кадре), после чего через вход 31 в регист1мл поступают данные о новом кадре. Элементы И 14, 11, 12, а также триггер 9 знака 9 служат для выработки в случае отрицательной оценочной функЕши (в знаковом разряде сумматора 1) + 1 или -1 в зависимости от того, возрастающая или убывающая прямая аппроксимируется в данном ( Л)1 О или АХ О). Полученные сигнылы подаются через входы 27 в блок управления соответствующего изменения текущето значения координаты X , выбираемого из регистра 6. При этом блок 25 функционирует слудующим образом. Сигналами по структурному входу 27 в регистр 32 записывается начальный адрес соответствукяцей микропрм раммы. Адрес микрокоманды по связи 29 через дешифратор микрокоманды и далее по связям 40, 41 используется для выбора слова микрокоманды нз памяти микроопераций 34 и памяти переходов 35. Код микрокоманды по связи 42 через преобразователь код микрокоманды 36 определяет набор управляющих сигналов на выходах 26, 28. На выходе 46 формируется сигнал в случае возможного разветвления микропрограммы (при микрокоманде условного перехода). При наличии сигнала на выходе 46 испольнительный адрес перехода к следующей микрокоманде образуется как сумма слова по связи 44, поступившего из памяти переходов 35 по связи 43 через регистр переходов 37, и слова по связям 27, 29, 30 на входах модификации 38. Адрес следующей микрокоманды по свяи 45 поступает на регистр адреса микрооманды 32, и процесс повроряется. Еси на выходе 46 сигнал отсутствует,
торазветвления нет и испглнитепъный адрес перехода на выходе 45 равен ад реЬу на входе 44 (суммирование не производите Наличие в слове модификации адреса перехода сигналов со еходов 29, 30 позволяет организовать требуемое разветвление алгоритма в зависимости от знака координатного прирбццения и знака оценочной функции. На каждом кадре интерполяции частота шагов оп ределяется генератором 10.
Экономический эффект - 40 руб; на одно изделие.
Формула изобретения
Линейный интерполятор, содержащий сумматор, к первому входу которого
подключены выходы параллельных цепей, каждая из которых состоит из включенных последовательно первого элемента И, регистра и второго элемента И, причем первые входы всех первых элементе И подключены к входу устройства и первому выходу сумматора, второй выход которого и выход генератора тактовых импульсов соединены с входами третьего элемента И, а другие входы первых и вторых элементов И и второю входы сумматора подключены к первому выходу блока управления, соединенного первым входом с вторым выходом сумматора, отличающийС я тем, что, с целью упрощения устройства, он содержит триггер и четвертые элементы И, входы которых подключены к выходу третьего элемента И и через триггер- - к входам соответствующего регистра, а выходы - к вторым входам блока упрарления, втоорй выход которого соединен с третьим входом сумматора.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР № 545972, кл. С Об В 19/18, 1976.
Фиг. 2
