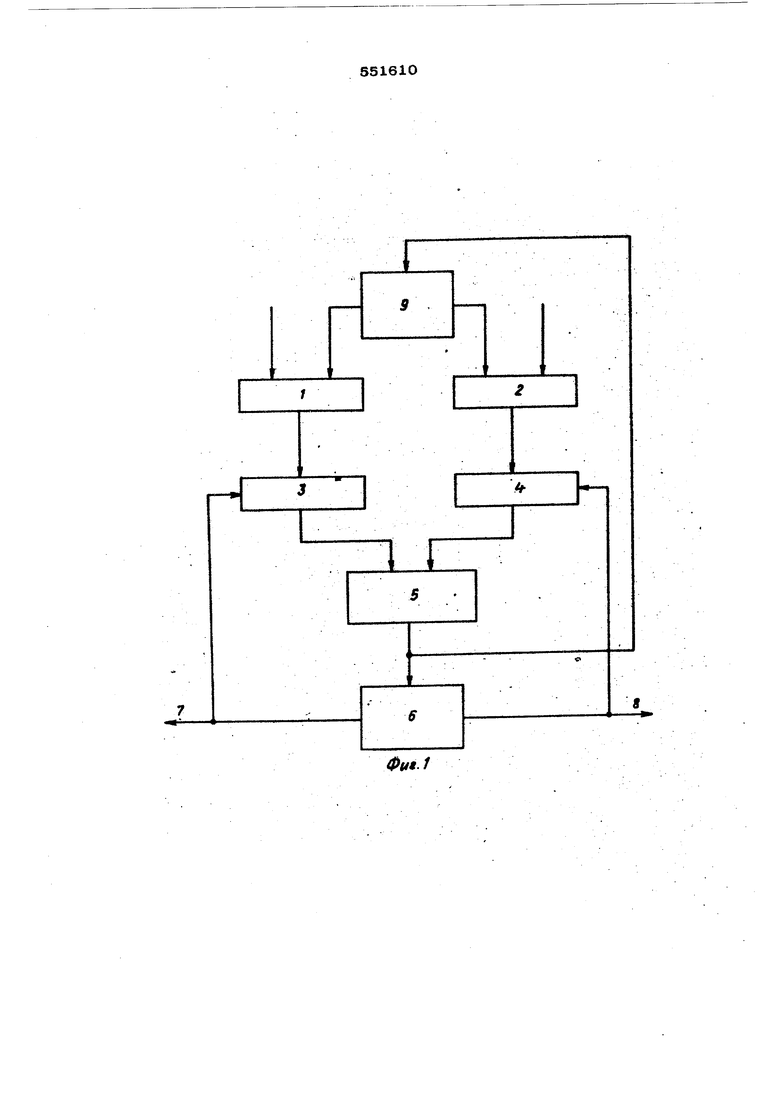
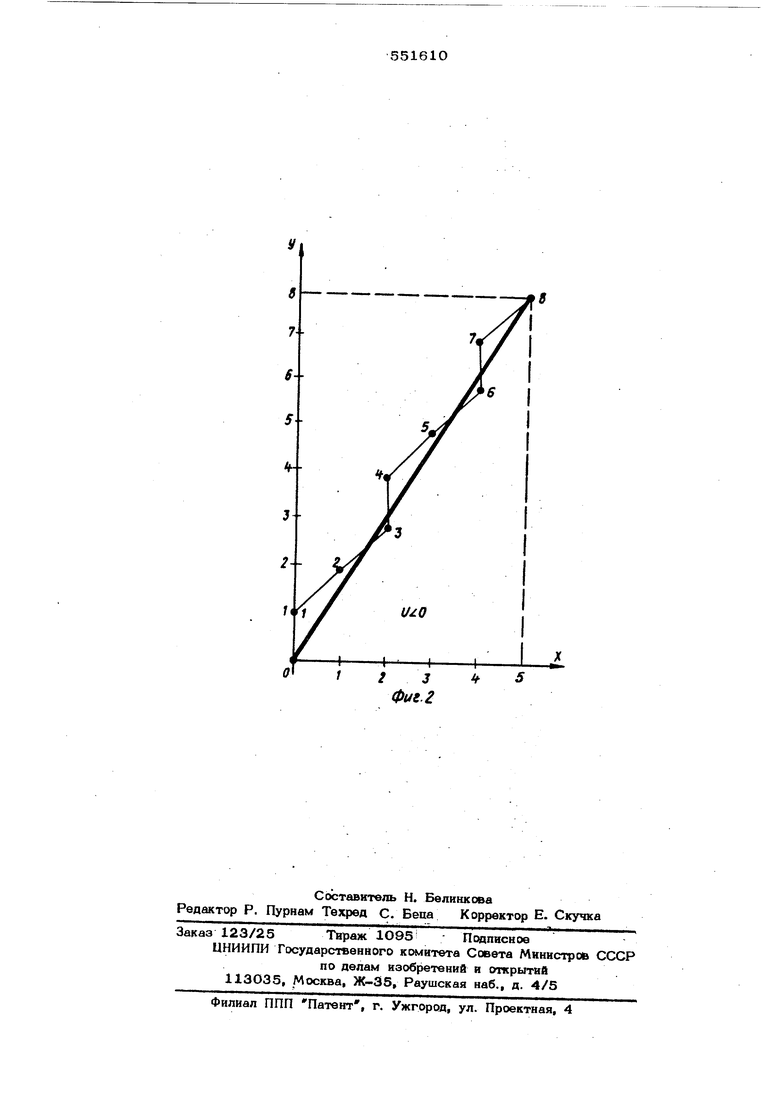
(54) ЛИНЕЙНЫЙ ИНТЕРПОЛЯТОР Положительный знак результата { /лХ/ /АУ/) является признаком перезаписи модуля разнсхгги /-3/ в регистр 1, пред варительно стирая его сооержимое, отрицательный знак ( ) является признаком перезаписи мсшуля разности с тем же условием в регистр 2. На етом заканчивается подготовительный этап пр8№шествукнцнй собственно процессу ндагерпол ции (в регистре 1 эвписано число S, в регистре 2 - число 3 сумматор S - обнулеи); Блок 6 анализа оиеночи функции U под ключен к зкаковсяму раарвау сумматора и в процессе янтерпоп шви гадает вапраалвнне генерируемого перемешзиня и характер сле дуюшеЙ за ивм арифметипескоЗ операции по расчету очередного значения оценочной функ ции в соответствии с формулами 1)есля /AX/i/AY/ при и ОперемвщзняепоХв U,-«i,f U j-fA f при UH i О пвремвшеяав по ХУ и Ц, :, j в .Uij -//AX/-/4Y// 2)еслв/лХ/ /АУ/ пря и 0 пч вметявнав по ХУ я1,4|, -Uji-//AX/-/4V// npHUf-f«b перемещвняв по У в ,-,. Во время янтврполапяв @след за перемещением по напр лвяню, хар&ктеризуемсму меньшей проекций, обваательно следует перемешенве л о иалрвумюняю, характеряз & мому большей проекпвей. Поообная аахономерность поааоляет уско рить гфоаесс внтерпонишии, всегда стровождая алементарнов перемещение вдсмш ме шей проекции перемешеннем йаоль большей проекции, совместив и операции по расчету оценочной функции. Первоначально оценочна функция U (содержимое сумматора 5) равна нулю.. В соответствии с ука нными формулами блоком 6 осуществляется генерация по вььхоау 7 алементарного перемещения по направлению оси У If последующее прибавление к содержимому: сумматора 5 кода, записанного в регистре 1, т.е. т. 1 0 О шаг по У (вых. 7) 1/2 О « 5 - 5. Далее анализируется знак 1Ьлько что полученного значения оценочной функции и в соответстБин с вышеуказанными формулами блок 6 генерирует по выходу 8 комбинированное (совместное по X н У) элементарное перемещение и предопределяет последующее вычитание из содержимого сумматора 5 кода, записанного в регистре 2, т.е. т. 2 шаг по X, У (вых. 8) U 5-3-2. Аналогично произвгЬдится расчет направлений остальных перемещений и их генерация, т.е. T. шаг по X У (вых.8) Од. Т.4 U4.0 шаг по X (вых.7) U -1 + т. 5 и,0 шаг по ХУ (вых.В) U -l-3-l т.) шаг по ХУ (вых.8)Ц«1-3 -2 Т.7 и/0 шаг по У (вых.7) (j -2+5-3 Т.8 шаг по ХУ (вых.8)Ц-3-3-0. Увеличение быстродействия интерполятора на каждом интерполируемом отрезке позволяет применять более дешевую и менее быстродействующую систему элеме тов для получения тех же эксплуатацяо ных характеристик или увеличить скечЕюстные характеристики и связанную с нимийнормационную производительность устройтв, использующих данный интерполятор. Формула изобретения Линейный интерполятор, содержащий регистры координатных приращений соединен ные через блоки совпадения со входами сум матора, выход которого через блок анаянза знака оценочной функции подключён к управляющим входам блоков савацаеявя отличающийся тем, что, с целью псх. выщения быстродействия ииггерпопят(а, в него введен блсж анализа знака разности ггоординатных приращений, вход которого подключен к выхопу сумматора, а выходы - ко входам регистре координатных прираще-, Источники информации, принятые во внимание при экспертизе 1.Авторское оэидетедаство СССР № 337822,М.Кл GO6 G 3/00,17.05 71. 2.Авторское свидетельство СССР J 271903,М.Кл. Q06 G 7/30,25.11.68. 3.Агурский М. С. и др. Числовое программное управление станками, М., Машиностроение, 1966, с. 176. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный интерполятор | 1985 |
|
SU1298714A1 |
| Линейный интерполятор | 1980 |
|
SU920636A2 |
| Линейный интерполятор | 1987 |
|
SU1439532A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Линейный интерполятор | 1979 |
|
SU888073A1 |
| Трехкоординатный линейный интерполятор | 1987 |
|
SU1437834A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Линейный интерполятор | 1989 |
|
SU1674064A1 |
| Цифровой интерполятор | 1981 |
|
SU1003022A1 |
| Линейный интерполятор | 1986 |
|
SU1383302A1 |
Фи9.1
