1
(21)4847006/07 (22) 04.07.90 (46)07.10.92. Бюл. №37
(71)Ленинградский институт точной механики и оптики
(72)И. В.Мирошник, В.О.Никифоров и В.Н.Дроздов
(56) Исследование и разработка микропроцессорной системы управления ГЭУ парома проекта 16390. Второй этап (промежуточный). Отчет по научно-исследовательской работе, № гос. регистрации 01870094772- ЛИТМО, 1988, с. 9, рис. 1.1
(54) ДВУХЪЯКОРНЫЙ ПОСТОЯННОГО ТОКА
ЭЛЕКТРОПРИВОД
(57) Использование: в электроприводах для организации режимов выравнивания токов якорных цепей электродвигателей. Сущность: устранение разбаланса якорных токов обеспечивается за счет введения перекрестных самонастраивающихся связей по величине разбаланса якорных токов При этом сигнал управления вырабатывается общим для обоих каналов регулятора. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления электроприводом одноковшового экскаватора | 1989 |
|
SU1781392A1 |
| Электропривод с автономным источником питания | 1984 |
|
SU1236594A1 |
| Электропривод постоянного тока | 1989 |
|
SU1760622A1 |
| Система стабилизации скорости электропривода | 1987 |
|
SU1481710A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Электропривод постоянного тока | 1986 |
|
SU1403316A1 |
| Моментный электродвигатель постоянного тока | 1988 |
|
SU1629949A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
| Цифровой электропривод постоянного тока | 1989 |
|
SU1644347A1 |
Изобретение относится к электротехнике и может быть использовано в двухъякор- ных электроприводах постоянного тока для организации режимов выравнивания токов якорных цепей электродвигателя.
Известен электропривод двойного рода тока, содержащий двухъякорный двигатель постоянного тока, каждый якорь которого питается от синхронного генератора через неуправляемый выпрямитель, а управление двигателем (в том числе поддержание равенства токов якорных обмоток) осуществляется регуляторами, воздействующими на управляемые выпрямители обмоток возбуждения синхронных генераторов; для каждого генератора используется собственный регулятор с набором датчиков тока якоря, тока возбуждения генератора, напряжения якоря (Гребные электрические установки, справочник - Айзенштадт Е.Б., Гилерович Ю.М., Горбунов Б. и др. - Л.: Судостроение, 1985- с. 68, рис. 2.4.2). Недостатком такого электропривода является низкое быстродействие из-за большой инерционности обмоток возбуждения генераторов, а также малая точность поддержания равенства якорных токов из- за разброса параметров якорных цяпей
Наиболее близок к предлагаемому двухъякорный электропривод, содержащий двухъякорный двигатель постоянного тока. датчик частоты вращения, регулятор первого канала, регулятор второго канал з, датчики тока якоря и усилители мощности первого и второго каналов (Исследование и разработка микропроцессорной системы управления ГЭУ парома проекта 16390. Второй этап (промежуточный) - Отчет по науч- но-исследовательской работе N; гос регистрации 01870094772-ЛИТМО. 1988 с 9. рис. 1.1). Регулятор первого каната через первый усилитель мощности подключен к первому якорю электродвигателя, а регулятор второго канала через второй усилитель мощности - к второму якорю электродвигателя. В цепь первого якоря включен первый датчик тока, соединенный с первым входом регулятора первого канала, а в цепь второго якоря - второй датчик тока, соединенный с первым входом регулятора второго канала.
VJ
О
XI о
XI
00
Вторые входы обоих регуляторов соединены с датчиком частоты вращения, В процессе работы электропривода сопротивления обмоток якоря претерпевают неконтролируемые изменения, обусловленные, в частности, нагревом электродвигателя. Такие изменения параметров электропривода приводят к разбалансу якорных токов, ухудшению качества регулирования по отдельным каналам и разбалансу моментов, что вызывает появленйё Ь%ремен ногб вб ёреме- ни скручивающего момента, вызывающего сокращение срока службы электропривода,
Целью изобретения является повышение качества регулирования за счет устранения разбаланса якорных токов.
Применение предлагаемого устройства позволяет повысить качество регулирования, увеличить надежность и срок службы электропривода.
Поставленная цель достигается тем, что в электропривод, содержащий двухъякор- ный электродвигатель постоянного тока, в яко рные цепи которого включены первый и второй датчики тока якоря (ДТЯ), два усилителя мощности (УМ), выход первого УМ подключен к первому якорю электродвигателя, а выход второго УМ - к второму якорю электродвигателя, датчик частоты вращения (ДЧВ) и регулятор, первый вход которого соединен с выходом первого ДТЯ, а второй вход - с ДЧВ, дополнительно введены два элемента сравнения (ЭС) сумматор, два элемента умножения (ЭУ), два масштабных усилителя (МУ) и интегратор, второй ДТЯ подключен к инвертирующему входу первого ЭС и к первым входам обоих ЭУ, второй ДТЯ подключен к второму входу первого ЭС, выход которого через второй вход первого ЭУ, первый МУ и интегратор подключен к второму входу второго ЭУ, второй ЭУ через второй МУ подключен к первому входу сумматора и инвертирующему входу второго ЭС, первые входы которых соединены с выходом регулятора, выход сумматора соединен с входом второго УМ, а выход второго ЭС - с входом первого УМ.
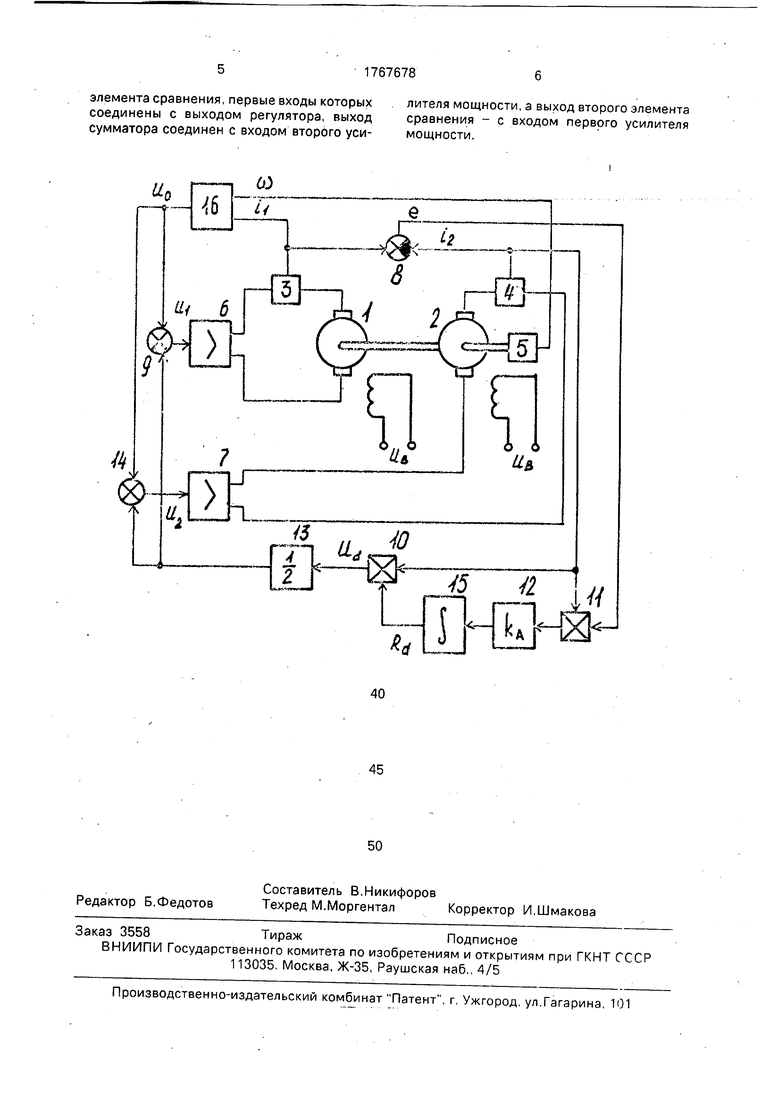
На чертеже представлена функциональная схема предлагаемого электропривода.
Электропривод содержит первую и вторую якорные обмотки 1 и 2, два датчика 3 и 4 тока датчика, датчик 5 частоты вращения, два усилителя 6 и 7 мощности, два элемента 8 и 9 сравнения, два элемента 10 и 11 умножения, два масштабных усилителя 12 и 13 сумматор 14, интегратор 15 и регулятор 16. Первый ДТЯ 3, включенный в первую якорную цепь 1, соединен с входом первого элемента 8 сравнения и входом регулятора 16. Выход второго ДТЯ 4, включенного во вторую якорную цепь 2, соединен с инвертирующим входом блока 8, первым входом первого ЭУ 10 и первым входом второго ЭУ 11, второй вход которого соединен с выходом блока 8. Выход блока 11 через первый МУ 12, интегратор 15 и второй вход блока 10 подключен к входу второго МУ 13. Выход МУ
13подключен к инвертирующему входу второго ЭС 9 и первому входу сумматора 14.
Выход блока 9 через первый УМ 6 подключен к первой якорной цепи 1, а выход блока
14через второй УМ 7 - к второй якорной цепи 2. Выход ДЧВ 5 соединен с вторым входом регулятора 16, выход которого подключей к вторым входам блоков 14 и 9. Коэффициент усиления блока 12 определяет скорость компенсации разбаланса якорных токов и подбирается при настройке, а коэффициент усиления блока 13 равен 0,5
Регулятор 16 является традиционным пропорциональным или интегропропорцио- нальным регулятором, синтезируемым на основе известных принципов теории автоматического управления из условия достижения главной цели управления(например, стабилизации частоты вращения, стабилизации заданного уровня мощности и т д).
Формула изобретения
Двухъякорный электропривод постоянного тока, содержащий двухъякорный электродвигатель постоянного тока, в якорные цепи которого включены первый и второй датчики тока якоря, два усилителя мощности, выход первого усилителя мощности подключен к первому якорю электродвигателя, а выход второго усилителя мощности - к второму якорю электродвигателя, датчик частоты вращения и регулятор, первый вход
которого соединен с выходом первого датчика тока якоря, а второй вход - с датчиком частоты вращения, отличающийся тем, что, с целью повышения качества регулирования за счет устранения разбаланса якорных токов, в него дополнительно введены два элемента сравнения, сумматор два элемента умножения, два масштабных усилителя и интегратор, второй датчик тока якоря подключен к инвертирующему входу первого элемента сравнения и к первым входам обоих элементов умножения, первый датчик тока якоря подключен к второму входу первого элемента сравнения, выход которого через второй вход первого элемента умножения, первый масштабный усилитель и интегратор подключен к второму входу второго элемента умножения, второй элемент умножения через второй масштабный усилитель подключен к первому входу сумматора и инвертирующему входу второго
элемента сравнения, первые входы которых соединены с выходом регулятора, выход сумматора соединен с входом второго усии
лителя мощности, а выход второго элемента сравнения - с входом первого усилителя мощности.
