; ,. , I
Устройство относится к электротехнике и может быть использовано для .управления двигателем переменного тока при питании его от автономного инвертора.
Известен электропривод, содержащий автономный инвертор, дискретный датчик скорости, формирователь частоты скольжения, компаратор, блок вычисления периода частоты дискретного датчика скорости, генератор опорной частоты, цифровой интегратор, делитель частоты и блок вычисления относительной выходной частоты преобразователя tl3.
Недостатком такрго устройства является сложность реализации устройства формирования частоты статора.
Наиболее близким техническим решением к изобретению является устройство для управления асинхронным двиг ателем, содержащее инвертор тока, подключенный к обмоткам асинхронного двигателя, импульсный датчик
частоты вращения на валу асинхронного двигателя, соединенный выходом с измерителем частоты вращения и блоком суммирования, распределитель импульсов, вход которого связан с блоком суммирования, а выход - с управляющим входом инвертора, блок задания частоты скольжения, выход которого подключен к блоку суммирования 123.
В данном устройстве блок суммирования не обеспечивает равномерное следование импульсов, что приводит к неравномерному вращени|р асинхронного двигателя, пульсации момента и снижению быстродействия.
Цель изобретения - повышение равномерности вращения и быстродействия за счет уменьшения пульсаций момента.
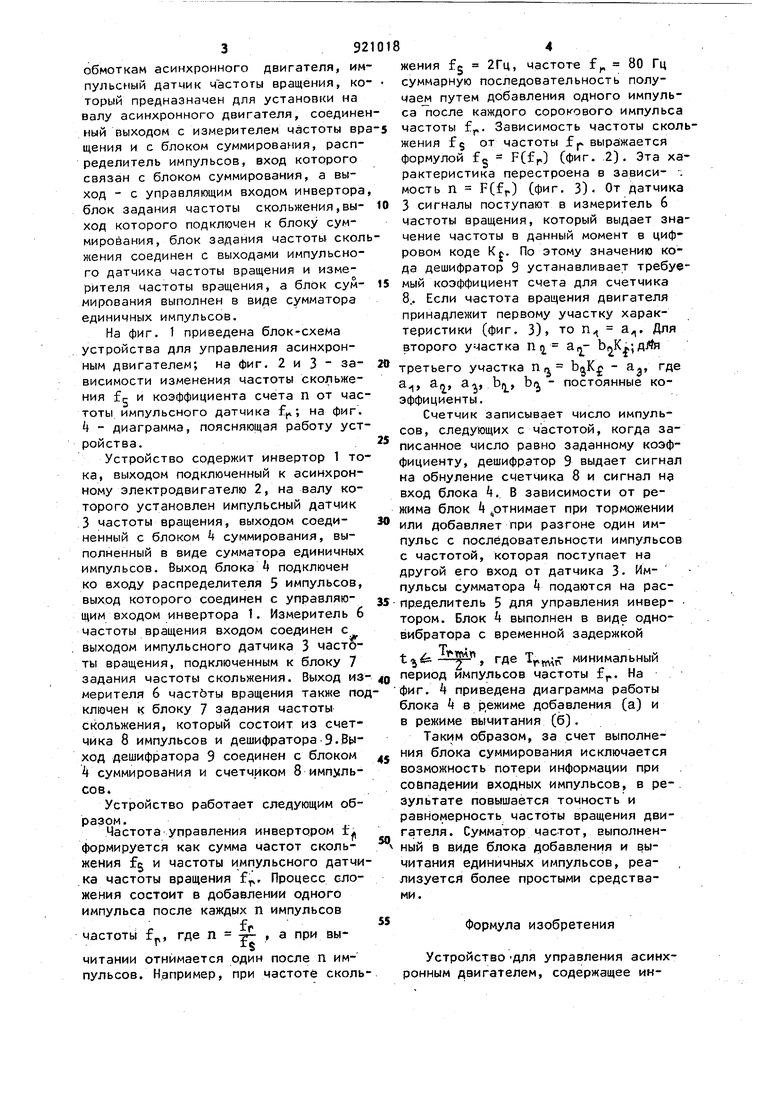
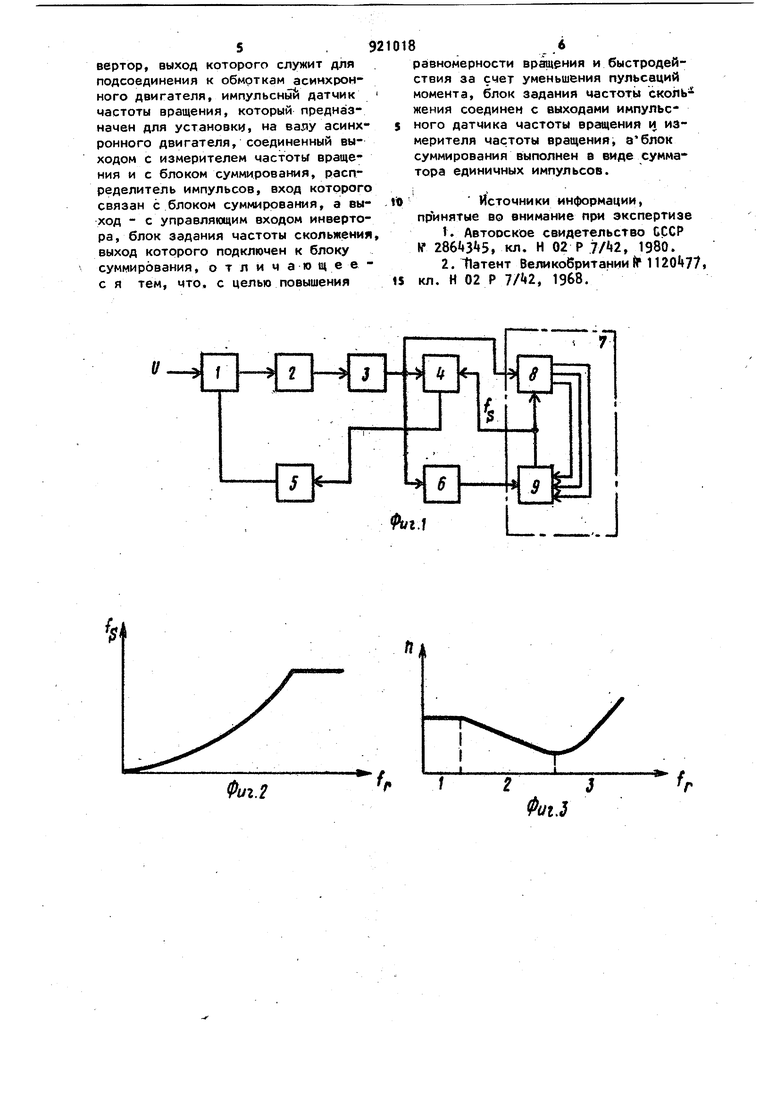
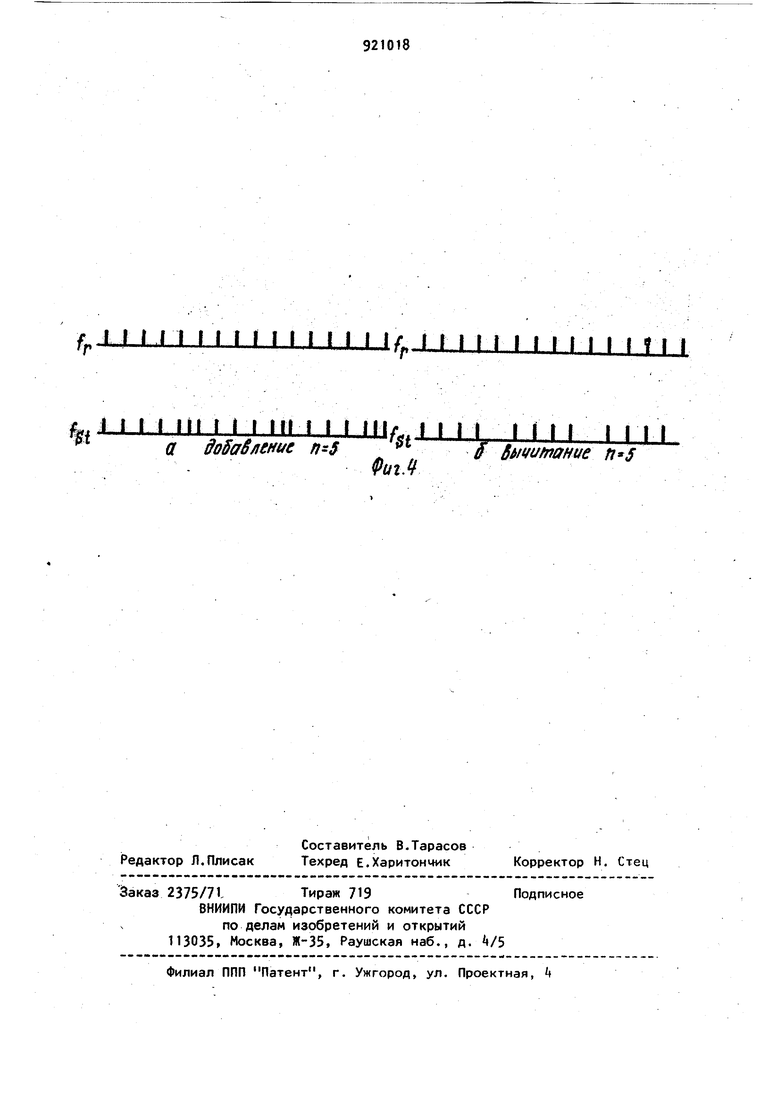
Поставленная цель достигается тем, что в устройстве для управления асинхронным двигателем, содержащем инвертор, ,выход которого подсоединен к обмоткам асинхронного двигателя, им пульсный датчик частоты вращения, ко торый предназначен для установки на валу асинхронного двигателя, соедине ный выходом с измерителем частоты вр щения и с блоком суммирования, распределитель импульсов, вход которого связан с блоком суммирования, а выход - с управляющим входом инвертора блок задания частоты скольжения,выход которого подключен к блоку суммирования, блок задания частоты скол жения соединен с выходами импульсного датчика частоты вращения и измерителя частоты вращения, а блок суммирования выполнен в виде сумматора единичных импульсов. На фиг. 1 приведена блок-схема устройства для управления асинхронным двигателем; на фиг. 2 и 3 - зависимости изменения частоты скольжения г и коэффициента счета п от час тоты импульсного датчика f..; на фиг. k - диаграмма, поясняющая работу уст ройства. Устройство содержит инвертор 1 то ка, выходом подключенный к асинхронному электродвигателю 2, на валу которого установлен импульсный датчик 3частоты вращения, выходом соединенный с блоком суммирования, выполненный в виде сумматора единичных импульсов. Выход блокад подключен ко входу распределителя 5 импульсов, выход которого соединен с управляющим входом инвертора 1. Измеритель 6 частоты вращения входом соединен с выходом импульсного датчика 3 частоты вращения, подключенным к блоку 7 задания частоты скольжения. Выход из мерителя 6 частбты вращения также по ключен к блоку 7 задания частоты скольжения, который состоит из счетчика 8 импульсов и дешифратора 9.Выход дешифратора 9 соединен с блоком 4суммирования и счетчиком 8 импульсов. Устройство работает следующим образом. Частота управления инвертором f формируется как сумма частот скольжения fg и частоты импульсного датчи ка частоты вращения f. Процесс сложения состоит в добавлении одного импульса после каждых п импульсов 4acTotbt , где п тД- , а при вы1rgчитании отнимается один после п импульсов. Например, при частоте сколь жения fg 2Гц, частоте f 80 Гц суммарную последовательность получаем путем добавления одного импульса после каждого сорокового импульса частоты р. Зависимость частоты скольжения fg от частоты ff4 выражается формулой fg - F(f) (фиг. 2). Эта характеристика перестроена в зариси- : мость п F(fp) (фиг. 3). От датчика 3 сигналы поступают в измеритель 6 частоты вращения, который выдает значение частоты в данный момент в цифровом коде K. По этому значению кода дешифратор 9 устанавливает требуемый коэффициент счета для счетчика 8.. Если частота вращения двигателя принадлежит первому участку характеристики (фиг. 3) то а,. Для второго участка п Q ая- третьего участка п ,j - а, где а, В., а,, b,j, Ъс - постоянные коэффициенты. Счетчик записывает число импульсов, следующих с частотой, когда записанное число равно заданному коэффициенту, дешифратор 9 выдает сигнал на обнуление счетчика 8 и сигнал на вход блока k. Q зависимости от режима блок k отнимает при торможении или добавляет при разгоне один импульс с последовательности импульсов с частотой, которая поступает на другой его вход от датчика 3. Импульсы сумматора k подаются на распределитель 5 для управления инвер- тором. Блок 4 выполнен в виде одновибратора с временной задержкой t-t , где минимальный период импульсов частоты р. На фиг. k приведена диаграмма работы блока k в р,ежиме добавления (а) и в режиме вычитания (б). Таким образом, за счет выполнения блока суммирования исключается возможность потери информации при совпадении входных импульсов, в ре-. зультате повышается точность и равномерность частоты вращения двигателя . Сумматор частот, выполненный а виде блока добавления и вычитания единичных импульсов, реализуется более простыми средствами. Формула изобретения Устройство -для управления асинхронным двигателем, содержащее инвертор, выход которого слукит для подсоединения к обмоткам асинхронного двигателя, импульсный датчик частоты вращения, который предназначен для установки, на валу асинхронного двигателя, соединенный выходом с измерителем частоты вращения и с блоком суммирования, распределитель импульсов, вход которого связан с блоком суммирования, а выход - с управляющим входом инвертора, блок задания частоты скольжения выход которого подключен к блоку суммирования, отл и чающее с я тем, что. с целью повышения
равномерности вращения и быстродействия за счет уменьшения пульсаций момента, блок задания частоты скояЬжения соединен с выходами импульс ного датчика частоты вращения и измерителя частоты вращения, аблок суммирования выполнен в виде сумматора единичных импульсов.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР f , кл. Н 02 Р 7/Ц2, 1980.
2.11атент Великобритании И 11ZO кл. Н 02 Р 7Л2, 1968.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным двигателем | 1980 |
|
SU949767A1 |
| Устройство для управления асинхронным короткозамкнутым электродвигателем | 1981 |
|
SU989732A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| Устройство для управления асинхронным короткозамкнутым двигателем | 1980 |
|
SU900397A1 |
| Цифровой стробоскользиметр и вычитающее устройство с цифровой индикацией | 1983 |
|
SU1257523A1 |
| Устройство для управления автономным инвертором напряжения | 1986 |
|
SU1352601A1 |
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1979 |
|
SU1037403A1 |
| Электропривод переменного тока | 1979 |
|
SU961087A1 |
| Регулятор частоты для асинхронного тягового электропривода | 1982 |
|
SU1026275A1 |
t3J
гЛ
Фиг.2
Л
2J
Фиг.2 jL, i I pi t I iii I It it I I ill I I I j I yr ДлЛгт я ии / S ivuMOHue f до§а6ленис r ---их.хилх г/г.
