(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННЫМ КОРОТКОЗАМКНУТЫМ ЭЛЕКТРОДВИГАТЕЛЕМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным двигателем | 1980 |
|
SU921018A1 |
| Устройство для управления асинхронным двигателем | 1980 |
|
SU949767A1 |
| Устройство для формирования скольжения асинхронного двигателя в частотно-регулируемом электроприводе | 1980 |
|
SU866682A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1979 |
|
SU1037403A1 |
| Устройство для управления асинхронным короткозамкнутым электродвигателем | 1977 |
|
SU699643A2 |
| Устройство для формирования абсолютногоСКОльжЕНия АСиНХРОННОгО дВигАТЕляВ чАСТОТНО-РЕгулиРуЕМОМ элЕКТРОпРиВО-дЕ | 1979 |
|
SU828355A1 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ С ШИМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2091979C1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
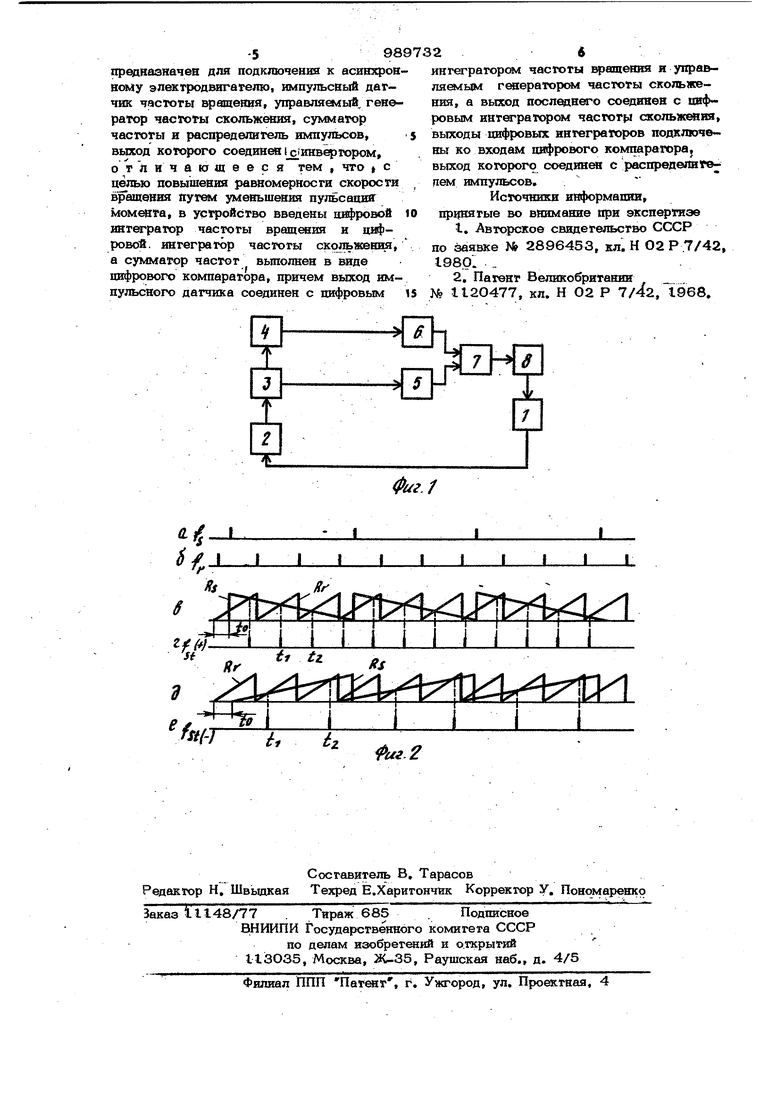
м Иаобрегение относится к элек1ротехнике и может быть использовано в электроприводе транспортных средств для формирования абсолютного скольжения в электроприводах с асинхронными электродвигателями и вентильными преобразователями частоты. Известно устройство, содержащее автономный инвертор, дискретный датчик скорости, формирователь частоты скольжения, компаратор, блок измерения перио да дискретного датчика скорости, генератор опорной частоты, 1ш)ровой интегратор, делитель частоты и блок вычисле ния относительной выходной частоты преобразователя С13. Недостатком такого устройства являет ся сложность реализации устройства формирования частоты статора. Наиболее близким к изобретению является устройство для управления асинхронным двигателем, содержащее инвертор Тока, подключенный к обмоткам асинхронного двигателя, импульсный датчик часто ты вращения на валу асинхронного двигателя, соединенный выходом с измерителем частоты вращения и блоком суммирования, а выход - с распределителем, являющимся управляющим входом инвертора, блок задания частоты скольжения, выход которого .подключен к блоку сумированнш127. Однако последовательность импульсов, образуемая в результате дискретного атп ебраичного сложения час гот сигналов датчика скорости и генератора частоты скольжения, оказывается в принципе неравномерной, что приводит к ВОЗНИКНОВВ нию неравномерности межкоммутационного интервала инвертора и, как следствие, к неравномерности скорости вращения двигателя. Цель изобретения - повышение равномерности скорости вращения двигателя путем снижения пульсации вращающего момшта. Поставленная цель достигается тем, что в устройство для управления асинxpoHHbDvi корогкоаамкнугым эпекгродвигагелем, содержащее инвертор, выход которого подключен к асинхронному элекН тродвигагелю, импульсный датчик частоты вращения, управляемый генератор частоты скольжения, сумматор частоты к распределитель импульсов, выход которого соединен с инвертором, введены цифровой интегратор частоты вращения и цифровой интегратор частоты скольжения, а сумматор вьшолнен в виде цифрового компаратора, причем выход импульсного датчика частоты вращения соединен с цифровым интегратором частоты вращения и управляемым генераторс 4 частоты, скольжения, а выход последнего соедине, с цифровым интегратором частоты скольжения, выходы цифровых интеграторов подключены к входам цифрового компаратора, выход Которого соединен с распределителем импульсов управления инвертора. На фиг. t представлена функциональная схема устройства управления асинхронным короткозамкнутым электродвигателем,: на фиг, 2 - временные диаграммы. Устройство содержит инвертор I, к выходу которого- подключен асинхронный электродвигатель 2 с импульсным датчиком 3 частоты вращения асинхронного электродвигателя. Выход датчика 3 часто ты вращения соединен с управляемым генератором 4 частоты скольжения и с входом цифрового интегратора 5 частоты вращения, а выход управляемого генератора 4 частоты скольжения подключен к входу цифрового интегратора 6 частоты скольжения. Выходы цифровых интеграторов 5 и 6 подключены к входам цифрового компаратора 7, выход которого соединен с распределителем 8 импульсов. Устройство работает следующим образом. Импульсы частоты вращения fp (фиг, 2б) от датчика 3 частоты вращения поступают на вход цифрового интегратора 5, а импульсы частоты скольжения fc (фиг 2а) от управляемого генератора 4 часто ты скольжения поступают на вход цифрового интегратора 6, Результаты интегрирования сравниваются в цифровом компараторе 7, В двигательном режиме сигналы на выходах интеграторов 5 и 6 изменяются в противоположныхнаправлена - ях и на входы цифрового компаратора 7 поступают сигналы, показанные на диаграмме (фиг, 2в), 6 момент равенства сравйиваемых величин цифровой :компаратор / вьщает импульс На распределитель (фиг, 2г), В режиме торможения сигалы на выходах цифровых интеграторов и 6 изменяются в одном направление сигналы на входе цк ового компаратоа 7 соответствуют диаграмме фиг, Йд на его выходе импульсы следуют, как оказано на фиг, 2е, В двигательном режиме в течение Т., имеет сигналы интеградного периода ора ,м(..„), де А - амплитудное эначетше сигналов нтегратора в пределах одного периода К, Л(1-) где -to - сдвиг фаз сигнала /Rp относительно сигнала Rg , В момент-времени t равенства сравниваемых величин справедливо соотношениегде п - число целых периодов Т , считаемое от начала координат В момент времени fcn это соотношение имеет вид ШЛ (} При решении последних уравнений период импульсов . поступающих на распределитель, равен вых-Т -Т Аналогичным образом в режиме торможенияVrв описанном устройстве неравномерность выходной частоты инвертора отсутствует, что повыщает постоянство момента и равномерность вращения асинхронного двигателя. Формула изобретения Устройство для управления -асинхронным короткозамкнутым электродвигателем, содержащее инвертор, выход которого
предназначен для подключения к асинхронному электродвигателю, импульсный датчик частоты вращения, управляемый; генератор частоты скольжения, сумматор частоты и распределитель импульсов, выход которого соединен 1 с1инвертором, отличающееся тем , что с целью повышения равномерности скорости вращенвя путем уменьшения пульс ацияг момента, в устройство введены цифровой интегратор частоты вращения н цифровой, интегратор частоты скольжении, а сумматор частот вьтолнен в виде цифрового компаратора, причем выход импульсного датчика соединен с цифровым
I
fi/f-J- 1.|-
/11 II I I
интегратором частоты вращения и управляемым генераторсял частоты скольжения, а выход последнего соединен с цифровым интегратором частот л скольжеиня, выходы цифровых интеграторов подключены ко входам цифрового компаратора j выход которого соединен с распределите; цем импульсов.
Источники информации, пр1;нятые во при экспертизе
по заявке N 2896453, кл. Н 02 Р.7/42, 1980.
№ 1120477, кл. Н 02 Р 7/42, 1968.
Ъ
LT
.1
i I
