1
Изобретение относится к электротехнике и может быть использовано в регулируемом электроприводе переменного тока с тиристорным автономным инвертором.
Известно устройство для управления асинхронным двигателем, подключенным к инвертору тока, содержащее сумматор частот, к одному входу которого подключен датчик скорости вращения двигателя, а к другому - блок формирования частоты скольжения 1.
Данное устройство имеет ограниченную точность из-за использования аналоговых блоков формирования частоты скольжения.
Наиболее близким к предлагаемому является устройство для управления асинхронным двигателем, содержащее инвертор напряжения, выход которого подключен к двигателю, импульсный датчик частоты вращения на валу ротора асинхронного двигателя, блок задания частоты скольжения, сумматор частот и распределитель импульсов, выход которого соединен с управляющим входом инвертора 2.
В данном устройстве сумматор нужно строить в виде автомата для исключения возможности потери импульсов при их совпадении во времени, что усложняет схему устройства. Импульсы суммарной частоты имеют неравномерное распределение во времени, что приводит к пульсации момента и неравномерности вращения ротора.
5Цель изобретения - повыщение равномерности вращ,ения путем уменьщения пульсации момента.
Поставленная цель достигается тем, что в устройство введены цифровой измеритель
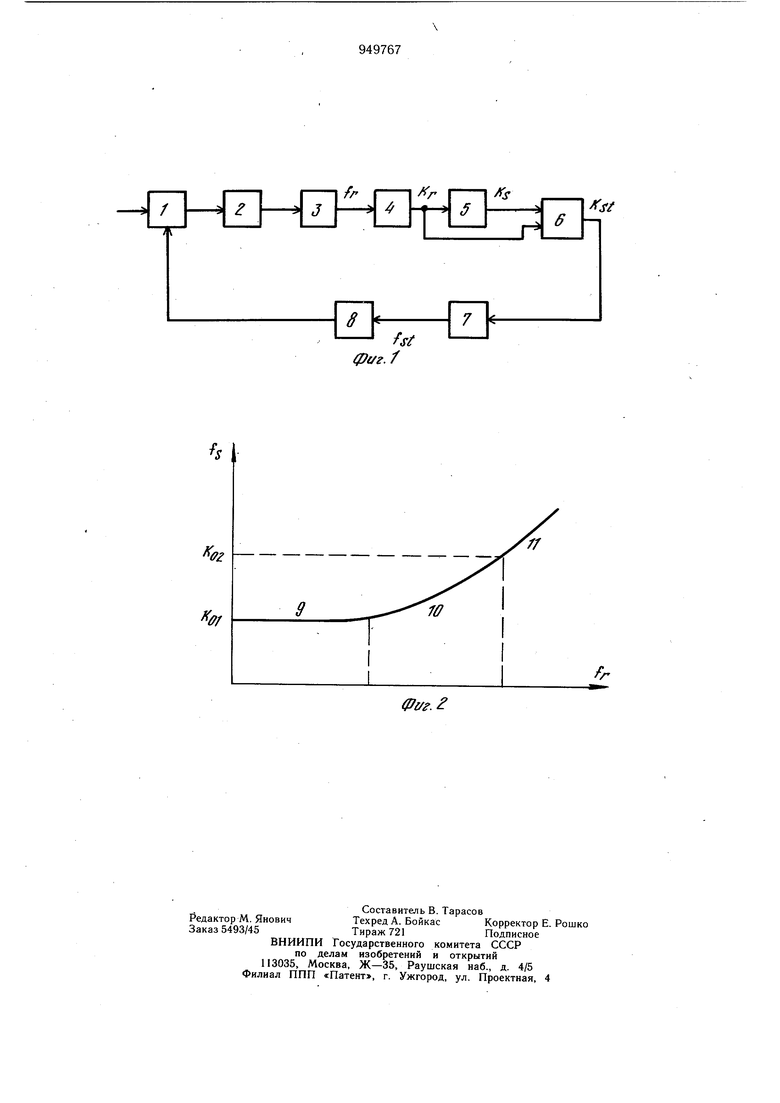
,Q частоты вращения ротора, блок развертки цифрового кода во временную последовательность импульсов, а блок задания частоты скольжения выполнен в виде цифрового функционального преобразователя, сумматор частот - в виде комбинационного сумматора кодов, причем выход импульсного датчика скорости вращения соединен с цифровым измерителем частоты вращения, один выход которого непосредственно, а другой через цифровой функциональный преобра2Q зователь соединены соответствующими входами комбинационного сумматора, выход которого через блок развертки цифрового кода во временную последовательность импульсов соединен с распределителем импульсов. На фиг. 1 изображена структурная схема устройства; на фиг. 2 - характеристика изменения частоты скольжения. Устройство содержит инвертор 1 (фиг. 1), к выходу которого подключен асинхронный двигатель 2 с импульсным датчиком 3 скорости вращения на валу ротора асинхронного двигателя. Выход датчика 3 соединен со входом цифрового измерителя 4 частоты вращения ротора, выход которого соединен со входом цифрового функционального преобразователя 5 и со входом комбинационного сумматора 6, другой вход которого подключен к выходу функционального преобразователя 5. Выход комбинационного сумматора 6 соединен со входом блока 7 развертки цифрового кода во временную последовательность импульсов, выход которого подключен ко входу распределителя 8 управляющих импульсов, а выход комбинационного сумматора 6 соединен с входом инвертора 1. Устройство работает следу1рщим образом. На вход инвертора 1 подают постоянное напряжение, которое после преобразования инвертором питает асинхронный двигатель 2. От импульсного датчика 3 импульсы с частотой fr поступают в цифровой измеритель 4, который выдает значение частоты в цифровом коде Кг- Функциональный преобразователь формирует код KS по принципу кусочнолинейной аппроксимации. Если значение кодов Кг находится на первом поддиапазоне 9, то функциональный преобразователь 5 формирует постоянный код KS Кот. (фиг. 2), на втором поддиапазоне 10 - код KS KOI + jKr. а на третьем поддиапазоне 11 - код KS Ко2 и т. д. (фиг. 2), где ai и а2 - конструктивные элементы, постоянные для данного двигателя. Комбинационный сумматор 6 суммирует значение кодов Кг и KS- Суммарный код Kjt подается на вход блока 7, который выдает импульсы с частотой fjt, пропорциональной коду Kjt, а потом эти импульсы поступают на распределитель 8 управляющих импульсов и далее на управляющие электроды тиристоров инвертора 1. Предлагаемое устройство управления асинхронного электропривода формирует управляющие импульсы, имеющие равномерное распределение во времени. Функциональный преобразователь 5 реализует характеристику изменения частоты скольжения по методу кусочно-линейной аппроксимации, поэтому устройство может осуществлять сложный закон изменения частоты скольжения. Быстродействие и надежность блока суммирования увеличиваются за счет применения комбинационного сумматора вместо сумматора частот двух последовательностей импульсов. За счет исключения неравномерности импульсов повышается стабильность скорости вращения. Формула изобретения Устройство для управления асинхронным двигателем, содержащее инвертор напряжения, выход которого подключен к асинхронному двигателю, импульсный датчик скорости вращения, установленный на валу ротора асинхронного двигателя, блок задания частоты скольжения, сумматор частот и распределитель импульсов, выход которого соединен с управляющим входом инвертора, отличающееся тем, что, с целью повышения равномерности вращения путем уменьщения пульсации момента, введен цифровой измеритель частоты вращения ротора асинхронного двигателя, блок развертки цифрового кода во временную последовательность импульсов, а блок задания частоты скольжения выполнен в виде цифрового функционального преобразователя, сумматор частот - в виде комбинационного сумматора кодов, причем выход импульсного датчика скорости вращения соединен с цифровым измерителем частоты вращения, один выход которого непосредственно, а другой через цифровой функционалыА 1Й преобразователь соединены с соответствующими входами комбинационного сумматора, выход которого через блок развертки цифрового кода во временную последовательность импульсов соединен с распределителем импульсов. Источники информации, принятые во внимание при экспертизе 1.Патент Великобритании № 1120477, кл. G3R, 1968. 2.Труды ВНИИГПЭ, том. 41, 1964, с. 242, рис. 4 б.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным двигателем | 1980 |
|
SU921018A1 |
| Устройство для управления асинхронным короткозамкнутым электродвигателем | 1981 |
|
SU989732A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Электропривод переменного тока | 1979 |
|
SU961087A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Частотнорегулируемый электропривод | 1978 |
|
SU767927A1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Электропривод переменного тока | 1984 |
|
SU1197032A1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ТЯГОВЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2451389C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085018C1 |
/J-/
/Г/
ffl
9
%
fr
