(54) ПРИВОД ПРОМЫШЛЕННОГО РОВОТА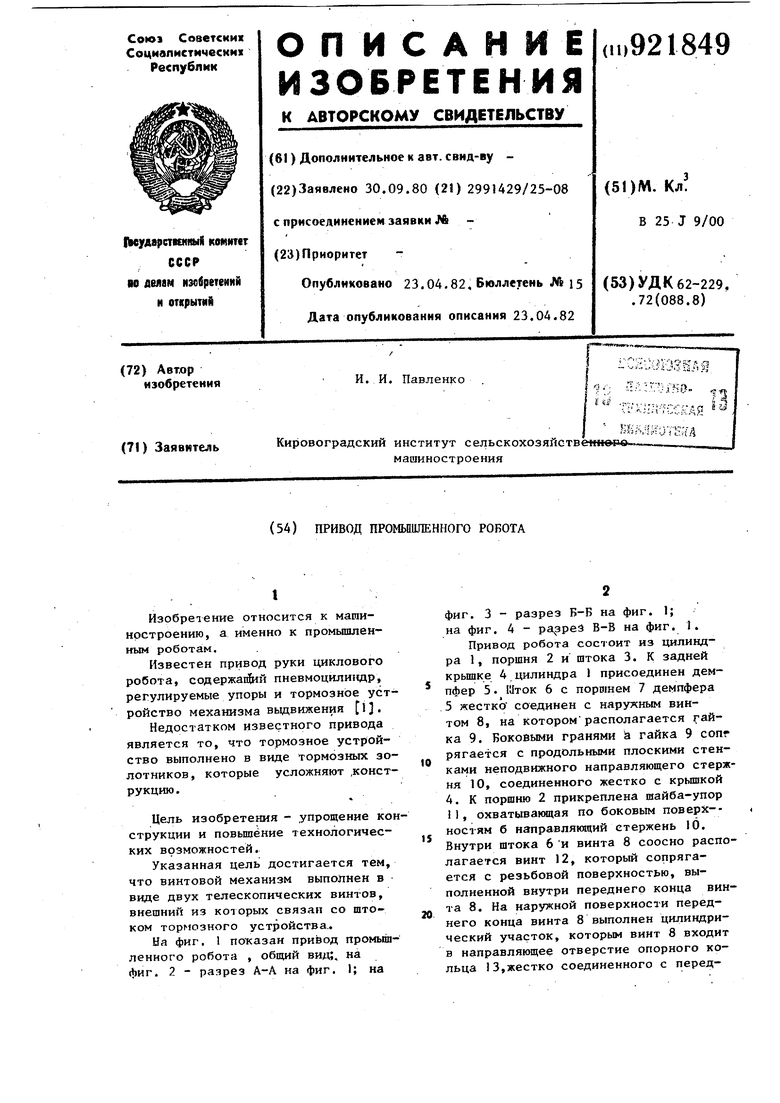
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод промышленного робота | 1983 |
|
SU1151448A1 |
| Привод робота | 1980 |
|
SU876417A1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР РЕЖИМОВ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНЫХ ДОРОГ | 2008 |
|
RU2389621C2 |
| Веломобиль с пневмоаккумуляторным приводом | 1988 |
|
SU1717471A1 |
| Устройство для резки заготовок на кольца | 1990 |
|
SU1736717A1 |
| Привод поворота исполнительного органа промышленного робота | 1983 |
|
SU1189551A1 |
| Модуль промышленного робота | 1980 |
|
SU891426A1 |
| Подвесной транспортный робот | 1986 |
|
SU1333571A1 |
| УСТРОЙСТВО ДЛЯ ЗАКРЫВАНИЯ ДВЕРИ | 2006 |
|
RU2312196C1 |
| Модуль промышленного робота | 1980 |
|
SU918079A1 |
1
Изобреаение относится к машиностроению, а именно к промьшшенным роботам.
Известен привод руки циклового робота, содержа14ий пневмоцилшщр, регулируемые упоры и тормозное устройство механизма выдвижения 1.
Недостатком известного привода является то, что тормозное устройство выполнено в виде тормозных золотников, которые усложняют .конструкцию .
Цель изобретения - упрощение конструкции и повьшёние технологических возможностей.
Указанная цель достигается тем, что винтовой механизм выполнен в виде двух телескопических винтов, внешний из которых связан со штоком тормозного устройства..
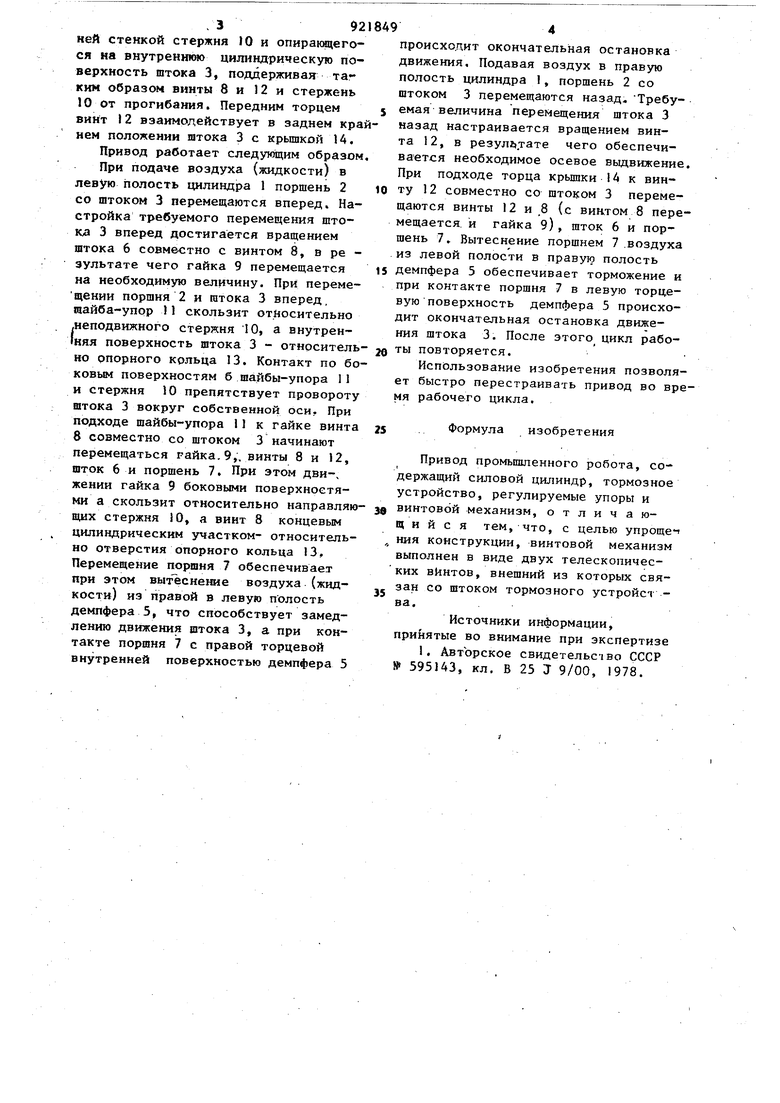
На фиг, 1 показан привод промышленного робота , общий вид;, на фиг. 2 - разрез А-А на фиг. 1; на
фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - В-В на фиг. 1.
Привод робота состоит из цилиндра 1, поршня 2 и штока 3. К задней крьш1ке 4 цилиндра 1 присоединен демпфер 5. Шток 6 с поршнем 7 демпфера 5 жестко соединен с наружным винтом 8, на которомрасполагается т аЛка 9. Боковыми гранями & гайка 9 сопг рягается с продольными плоскими стен10ками неподвижного направляющего стержня 10, соединенного жестко с крьш1кой 4. К поршню 2 прикреплена шайба-упор 11, охватывакнцая по боковым поверх-ностям б направлякяций стержень 10.
IS Внутри штока 6 и винта 8 соосно располагается винт 12, который сопрягается с резьбовой поверхностью, выполненной внутри переднего конца винта 8. На наружной поверхности перед20него конца винта 8 выполнен цилиндрический участок, которым винт 8 входит в направляющее отверстие опорного кольца 13,жестко соединенного с передней стенкой стержня 10 и опиракмдегося на внутреннюю цилиндрическую поверхность штока 3, поддерживая таким образом винты 8 и 12 и стержень 10 от прогибания. Передним торцем винт I2 взаимодействует в заднем кра нем положении штока 3 с крьшкой 14. Привод работает следукщим образом При подаче воздуха (жидкости) в левую полость цилиндра 1 поршень 2 со штоком 3 перемещаются вперед. Настройка требуемого перемещения шток/а 3 вперед достигается вращением штока 6 совме ;тно с винтом 8, в ре эультате чего гайка 9 перемещается на необходимую величину. При перемещении поршня 2 и штока 3 вперед, шайба-упор 1 скользит относительно .неподвижного стержня 10, а внутрен1НЯЯ поверхность штока 3 - относитель но опорного кольца 13. Контакт по бо ковьм поверхностям б шайбы-упора 11 и стержня 10 препятствует провороту штока 3 вокруг собственной оси. При подходе шайбы-упора 11 к гайке винта 8 совместно со штоком 3 начинают перемещаться гайка.9,. винты 8 и 12, шток 6 и поршень 7. При этом дви-, женин гайка 9 боковыми поверхностями а скользит относительно направляю щих стержня 10, а винт 8 концевым цилиндрическим участком- относительно отверстия опорного кольца 13, Перемещение поршня 7 обеспечивает при этом вытеснение воздуха (жидкости) из правой в левую полость демпфера 5, что способствует замедлению движения штока 3, а при контакте поршня 7 с правой торцевой внутренней поверхностью демпфера 5 происходит окончательная остановка движения. Подавая воздух в правую полость цилиндра 1, поршень 2 со штоком 3 перемещаются назад.Требуемая величина перемещения штока 3 назад настраивается вращением винта 12, в резулг1тате чего обеспечивается необходимое осевое вьщвижение. При подходе торца крышки 14 к винту 12 совместно со штоком 3 перемещаются винты 12 и.8 (с винтом 8 перемещается, и гайка 9), шток 6 и поршень 7. Вытеснение поршнем 7 .воздуха из левой полости в правую полость демпфера 5 обеспечивает торможение и при контакте поршня 7 в левую торцевую поверхность демпфера 5 происходит окончательная остановка движения штока 3. После этого цикл рабо повторяется. Использование изобретения позволят быстро перестраивать привод во врея рабочего цикла. Формула изобретения Привод промьшшенного робота, содержащий силовой цилиндр, тормозное устройство, регулируемые упоры и винтовой механизм, о т л и ч а ющ и и с я тем. Что, с целью упроще ния конструкции, винтовой механизм выполнен в виде двух телескопических винтов, внешний из которых связан со штоком тормозного устройства. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 595143, кл, В 25 J 9/00, 1978.
ita 5Фи5
