2, Привод по п. 1,отличающ и и с я тем, что диаметр поршней
дополнительных цилиндров больше диаметра поршней силовых цилиндров.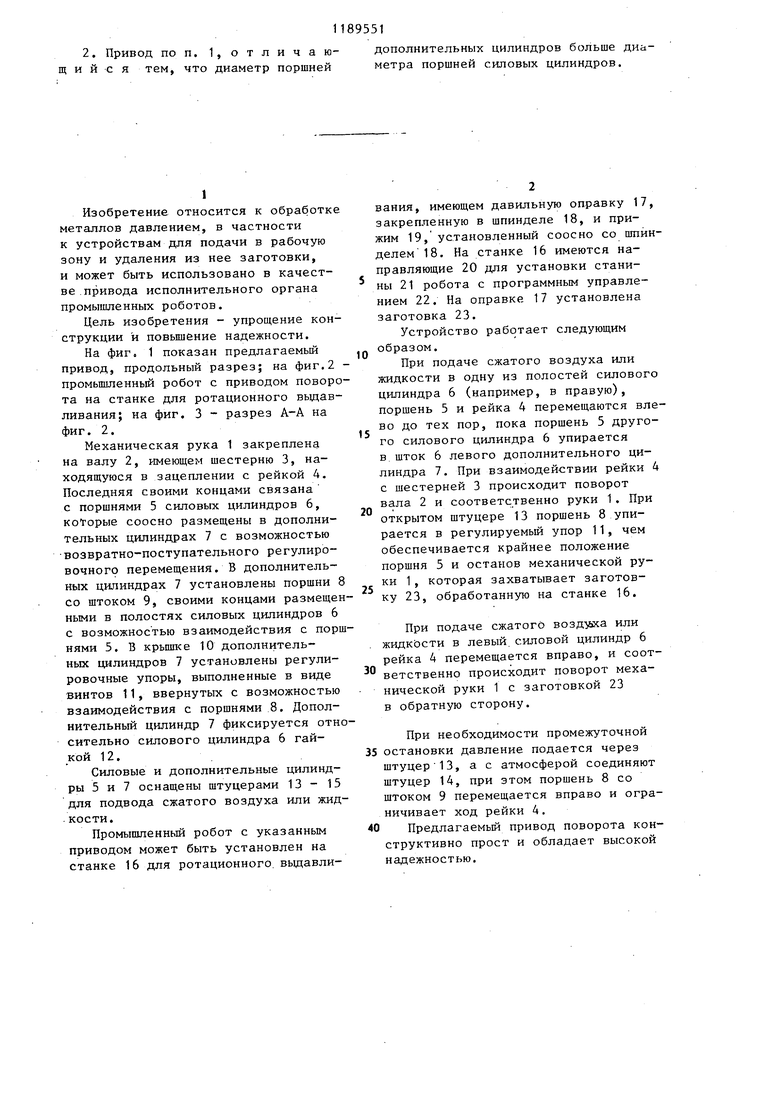
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1981 |
|
SU1042992A1 |
| Промышленный робот | 1984 |
|
SU1407787A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Устройство для ротационного выдавливания | 1983 |
|
SU1100027A1 |
| Устройство для автоматической смены инструмента | 1977 |
|
SU733961A1 |
| Г. И. Ицелев*Минское сцециальное конструкторское бюро автоматических линий | 1971 |
|
SU312735A1 |
| Раскатная головка для ротационного выдавливания | 1979 |
|
SU858980A1 |
| Устройство для автоматической смены инструмента | 1989 |
|
SU1698035A1 |
| Промышленный робот | 1974 |
|
SU503711A1 |
| Станок для накатывания резьбы на пустотелых заготовках | 1988 |
|
SU1547930A1 |

1. ПРИВОД ПОВОРОТА ИСПОЛНИТЕЛЬНОГО ОРГАНА ПРОМЫШЛЕННОГО РОБОТА, содержащий установленный в станине вал с шестерней и рейкой, несущий механическую руку, две пары силовых циливдров с поршнями и дополнительных цилиндров с крышкой и поршней со штоком, при этом силовой и дополнительный цилиндры каждой пары расположены соосно, и регулируемые упоры, отличающийся тем.,, что, с целью упрощения конструкции и повышения надежности, обе пары цилиндров .расположены соосно и симметрично по обе стороны вала, при этом каждый из силовых цилиндров размещен в одном из дополнительных цилиндров с возможностью возвратно-поступательного регулировочного перемещения, рейка своими концами связана с поршнем силовых цилиндров, шток .каяадого из дополнительных цилиндров размещен в полосi ти одного из силовых цилиндров с ВОЗ-. можностью взаимодействия с его поршСЛ нем, -каждый из упоров закреплен в крьш1ке одного из дополнительных цилиндров с возможностью взаимодействия с его поршнем. 00 со СЛ СП
1
Изобретение относится к обработке металлов давлением, в частности к устройствам для подачи в рабочую зону и удаления из нее заготовки, и может быть использовано в качестве привода исполнительного органа промышленных роботов.
Цель изобретения - упрощение конструкции и повышение надежности.
На фиг. 1 показан предлагаемый привод, продольный разрез; на фиг.2 промьшшенный робот с приводом поворота на станке для ротационного вьщавливания; на фиг. 3 - разрез А-А на фиг. 2.
Механическая рука 1 закреплена на валу 2, имеюш;ем шестерню 3, находящуюся в зацеплении с рейкой 4. Последняя своими концами связана с поршнями 5 силовых цилиндров 6, которые соосно размещены в дополнительных цилиндрах 7 с возможностью возвратно-поступательного регулировочного перемещения. В дополнительных цилиндрах 7 установлены поршни 8 со штоком 9, своими концами размещенными в полостях силовых цилиндров 6 с возможностью взаимодействия с поршнями 5. В крьшпсе 10 дополнительных цилиндров 7 установлены регулировочные упоры, выполненные в виде винтов 11, ввернутых с возможностью взаимодействия с поршнями 8. Дополнительный цилиндр 7 фиксируется относительно силового цилиндра 6 гайкой 12.
Силовые и дополнительные цилиндры 5 и 7 оснащены штуцерами 13 - 15 для подвода сжатого воздуха или жидкости.
Промышленный робот с указанным приводом может быть установлен на станке 16 для ротационного, выдавливания, имеющем давильную оправку 17, закрепленную в шпинделе 18, и прижим 19, установленный соосно со шпинделем 18. На станке 16 имеются направляющие 20 для установки станины 21 робота с программным управлением 22. На оправке 17 установлена заготовка 23.
Устройство работает следующим образом.
При подаче сжатого воздуха или жидкости в одну из полостей силового цилиндра 6 (например, в правую), поршень 5 и рейка 4 перемещаются влево до тех пор, пока поршень 5 другого силового цилиндра 6 упирается в шток 6 левого дополнительного цилиндра 7. При взаимодействии рейки 4 с шестерней 3 происходит поворот вала 2 и соответственно руки 1. При открытом штуцере 13 поршень 8 упирается в регулируемый упор 11, чем обеспечивается крайнее положение поршня 5 и останов механической руки 1, которая захватывает заготовку 23, обработанную на станке 16.
При подаче сжатого воздука или жидкости в левый силовой цилиндр 6 рейка 4 перемещается вправо, и соответственно происходит поворот механической руки 1 с заготовкой 23 в обратную сторону.
При необходимости промежуточной 35 остановки давление подается через штуцер13, а с атмосферой соединяют штуцер 14, при этом поршень 8 со штоком 9 перемещается вправо и ограничивает ход рейки 4.
40 Предлагаемый привод поворота конструктивно прост и обладает высокой надежностью.
Фи2.2
| Промышленный робот | 1981 |
|
SU1042992A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
