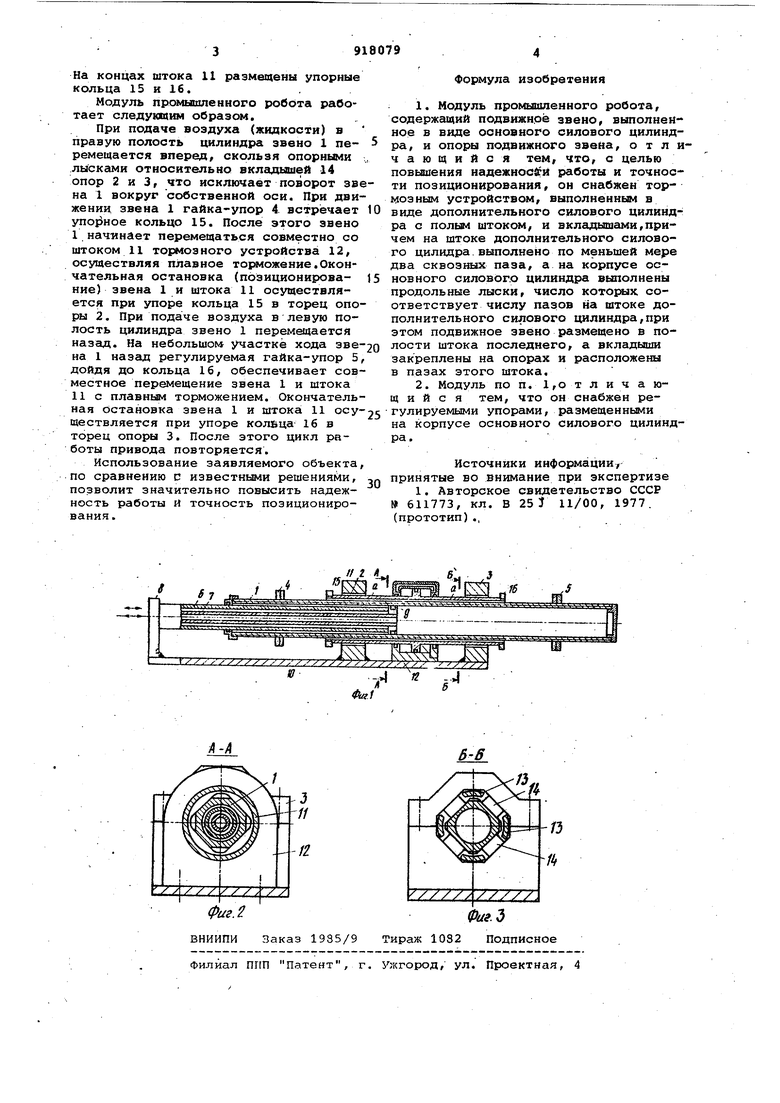
(54) МОДУЛЬ ПРбМЬаШЕННОГО РОБОТА 1 . . Изобретение относится к механизации и автоматизации производственных процессов, в частности к приводам под вижных звеньев роботов, манипуляторов и других устройств, и может быть использовано в различных отраслях народ ного хозяйства. Известен модуль промышленного робота, содержащий подвижное звено, выполненное в виде основного силового цилиндра, и опоры подвижного звена 1 Недостатком известного устройства является низкая надежность и точность позиционирования. Цель изобретения - повышение надеж ности работы и точности позиционироэа ния. .Цель достигается тем, что модуль промышленного робота снабжен тормозны устройстве, выполненным в виде дополнительного силового цилиндра с полым штоком, и вкладышами, причем на штоке дополнительного силовог 3 цилиндра выполнено по меньшей мере два сквозных паза, а на корпусе основного силового цилиндра выполнены продольные лыски, число которых соответствует числу пазов на шток дополнительного силового цилиндра, при этом подвижное звено размещено в полости штока последнего, а вкладыши закреплены на опорах и расположены в пазах этого штока.. Модуль может быть снабжен регулируемыми упорами, размещенными на корпусе основного силового цилиндра. На фиг. 1 показан общий вид модуля промышленного робота; на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1. Подвижное звено 1 робота выполнено в виде основного силового цилиндра, наружная поверхность которого представляет винт с несколькими продольными лысками вдоль его оси, которыми звено 1 установлено в опорах 2 и 3. На гребешках резьбы звена 1 расположены регулируемые гайки-упоры 4 и 5. Неподвижный шток звена 1 выполнен в-виде двух концентричных труб 6 и 7, соединенных с задней опорой 8 и поршнем 9. Опоры 2, 3 и 8 соединены плитой 10 в жесткую конструкцию. Звено 1 проходит через полый шток 11 тормозного устройства 12, соединенного жестко с плитой 10. Шток 11 под опорами 2 и.З (на участках от границ а к концам штока) имеет пазы 13, в которых, расположены вкладыши 14.
На концах штока 11 размещены упорные кольца 15 и 16.
Модуль промышленного робота работает следующим образом.
При подаче воздуха (жидкости) в правую полость цилиндра звено 1 па- 5 ремещается вперед, скользя опорными , лысками относительно вкладьаией 14 опор 2 и 3, что исключает поворот звена 1 вокруг собственной оси. При движении звена 1 гайка-упор 4 встречает 10 упо|3ное кольцо 15. После этого звено 1 начинает перемещаться совместно со штоком 11 тормозного устройства 12, осуществляя плавное тоцм ожение.Окончательная остановка (позиционирова- 15 ние) звена 1 и штока 11 осуществляется при упоре кольца 15 в торец опоры 2. При подаче воздуха в левую полость цилиндра звено 1 перемещается назад. На небольшом участке хода зве-2о на 1 назад регулируемая гайка-упор 5, дойдя до кольца 16, обеспечивает совместное перемещение звена 1 и штока 11с плавным торможением. Окончательная Остановка звена 1 и штока 11 осу-25 ществляется при упоре кольца- 16 в торец опоры 3. После этого цикл работы привода повторяется.
Использование заявляемого объекта, по сравнению п известными решениями, Q позволит значительно повысить надежность работы и точность позиционирования.
формула изобретения
1. Модуль промышленного робота, содержащий подвижнрё звено, выполненное в виде основного силового цилиндра, и опоры подвижного звена, отличающийся тем, что, с целью повышения надежнос«гй работы и точности позиционирования, он снабжен тормозным устройством, выполненным в виде дополнительного силового цилиндра с польм штоком, и вкладышами,причем на штоке дополнительного силового цилидра выполнено по меньшей мере два сквозных паза, а на корпусе основного силового цилиндра выполнены продольные лыски, число которых соответствует числу пазов на штоке дополнительного силового цилиндра,при этом подвижное звено размещено в полости штока последнего, а вкладыши закреплены на опорах и расположены в пазах этого штока.
2. Модуль по п. 1,о т л и ч а ющ и и с я тем, что он снабжен регулируемыми упорами, размещенными на корпусе основного силового цилиндра..
Источники информации/ принятые во внимание при экспертизе
1. Авторское свидетельство СССР 611773, кл. В 25 11/00, 1977. (прототип) .,. .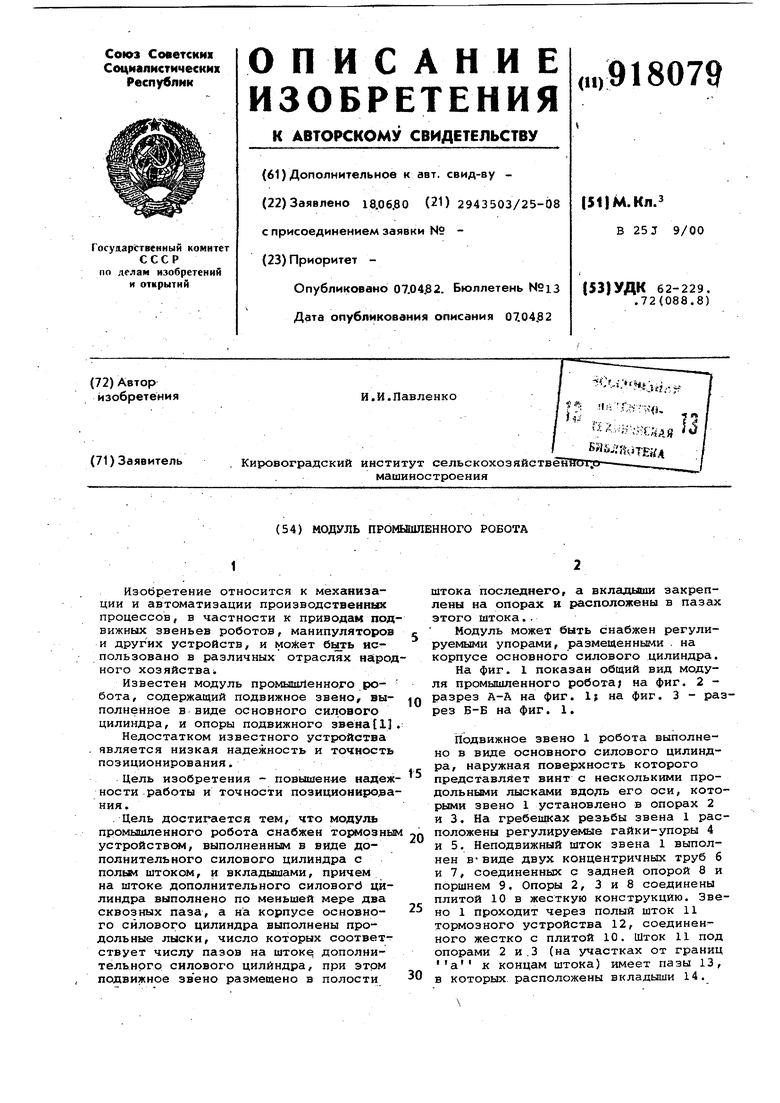
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль промышленного робота | 1986 |
|
SU1341016A1 |
| Модуль промышленного робота | 1980 |
|
SU891426A1 |
| Устройство для позиционирования руки промышленного робота | 1980 |
|
SU906687A1 |
| Модуль шарнира | 1980 |
|
SU980979A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Привод робота | 1980 |
|
SU876417A1 |
| Промышленный робот | 1979 |
|
SU908242A3 |
| Механизм позиционирования робота | 1978 |
|
SU774939A1 |
| Привод исполнительного органа робота | 1982 |
|
SU1122501A1 |
| Зажимное устройство и станок, оборудованный таким устройством | 2020 |
|
RU2759352C1 |
е
-1 ё
