(54) ПРИВОД РОБОТА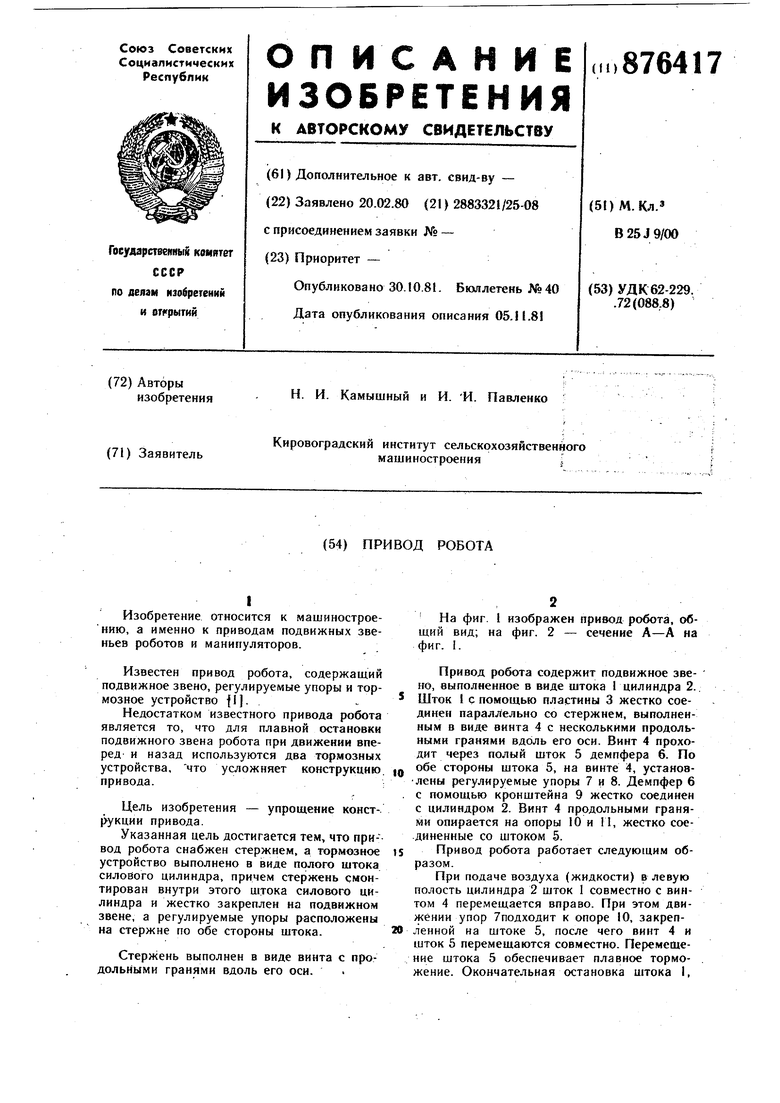
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод промышленного робота | 1980 |
|
SU921849A1 |
| Привод робота | 1979 |
|
SU901675A1 |
| Модуль промышленного робота | 1980 |
|
SU918079A1 |
| Привод исполнительного органа робота | 1982 |
|
SU1122501A1 |
| Модуль промышленного робота | 1980 |
|
SU891426A1 |
| Механизм позиционирования робота | 1978 |
|
SU774939A1 |
| Модуль промышленного робота | 1980 |
|
SU876419A1 |
| Механизм поворота руки промышленного робота | 1982 |
|
SU1060464A1 |
| Промышленный робот | 1978 |
|
SU776912A1 |
| Гидравлический демпфер | 1978 |
|
SU739279A1 |
I
Изобретение относится к машиностроению, а именно к приводам подвижных звеньев роботов и манипуляторов.
Известен привод робота, содержащий подвижное звено, регулируемые упоры и тормозное устройство fl|.
Недостатком известного привода робота является то, что для плавной остановки подвижного звена робота при движении вперед- и назад используются два тормозных устройства, что усложняет конструкцию, привода.;
Цель изобретения - упрощение конст1 укции привода.
Указанная цель достигается тем, что привод робота снабжен стержнем, а тормозное устройство выполнено в виде полого штока силового цилиндра, причем стержень смонтирован внутри этого штока силового цилиндра и жестко закреплен на подвижном звене, а регулируемые упоры расположены на стержне по обе стороны штока.
Стержень выполнен в виде винта с продольными гранями вдоль его оси.
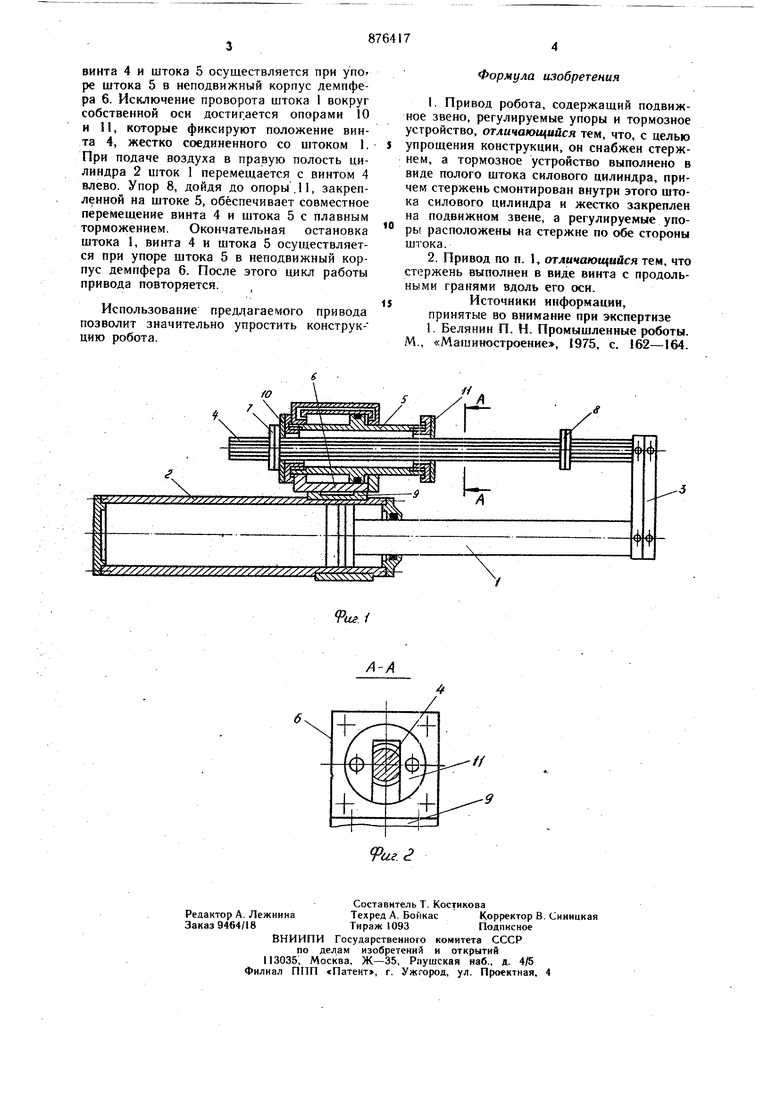
На фиг. I изображен привод робота, общий вид; на фиг. 2 - сечение А-А на
фиг. I.
Привод робота содержит подвижное звено, выполненное в виде штока 1 цилиндра 2.. Шток I с помощью пластины 3 жестко соединен параллельно со стержнем, выполненным в виде винта 4 с несколькими продольными гранями вдоль его оси. Винт 4 проходит через полый шток 5 демпфера 6. По обе стороны штока 5, на винте 4, установ10лены регулируемые упоры 7 и 8. Демпфер 6 с помощью кронштейна 9 жестко соединен с цилиндром 2. Винт 4 продольными гранями опирается на опоры 10 и 11, жестко сое.диненные со штоком 5.
Привод робота работает следующим обISразом.
При подаче воздуха (жидкости) в левую полость цилиндра 2 шток 1 совместно с винтом 4 перемещается вправо. При этом двнжении упор 7ПОДХОДИТ к опоре 10, закрепленной на штоке 5, после чего винт 4 и шток 5 перемещаются совместно. Перемещение штока 5 обеспечивает плавное торможение. Окончательная остановка штока I,
винта 4 и штока 5 осуществляется при упо ре штока 5 в неподвижный корпус демпфера 6. Исключение проворота штока I вокруг собственной оси достигается опорами 10 и И, которые фиксируют положение винта 4, жестко соединенного со штоком 1. При подаче воздуха в правую полость цилиндра 2 шток 1 перемещается с винтом 4 влево. Упор 8, дойдя до опоры.П, закрепленной на щтоке 5, обеспечивает совместное перемещение винта 4 и щтока 5 с плавным торможением. Окончательная остановка штока I, винта 4 и штока 5 осуществляется при упоре штока 5 в неподвижный корпус демпфера 6. После этого цикл работы привода повторяется.
Использование предлагаемого привода позволит значительно упростить конструкцию робота.
Формула изобретения
. Привод робота, содержащий подвижное звено, регулируемые упоры и тормозное устройство, отличающийся тем, что, с целью упрощения конструкции, он снабжен стержнем, а тормозное устройство выполнено в виде полого штока силового цилиндра, причем стержень смонтирован внутри этого штока силового цилиндра и жестко закреплен на подвижном звене, а регулируемые упоры расположены на стержне по dise стороны штока.
принятые во внимание при экспертизе 1. Белянин П. Н. Промышленные роботы. М., «Машиностроение, 1975, с. 62-164.
