(54) МОДУЛЬ ПРОМЫШЛЕННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1983 |
|
SU1079427A1 |
| Рука манипулятора | 1981 |
|
SU988546A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Модуль промышленного робота | 1980 |
|
SU918079A1 |
| Промышленный робот | 1978 |
|
SU874328A1 |
| Модуль промышленного робота | 1975 |
|
SU525541A1 |
| Модуль промышленного робота | 1981 |
|
SU1016154A1 |
| Модуль промышленного робота | 1978 |
|
SU730563A1 |
| Промышленный робот | 1983 |
|
SU1127765A1 |
| Модуль промышленного робота | 1986 |
|
SU1341016A1 |
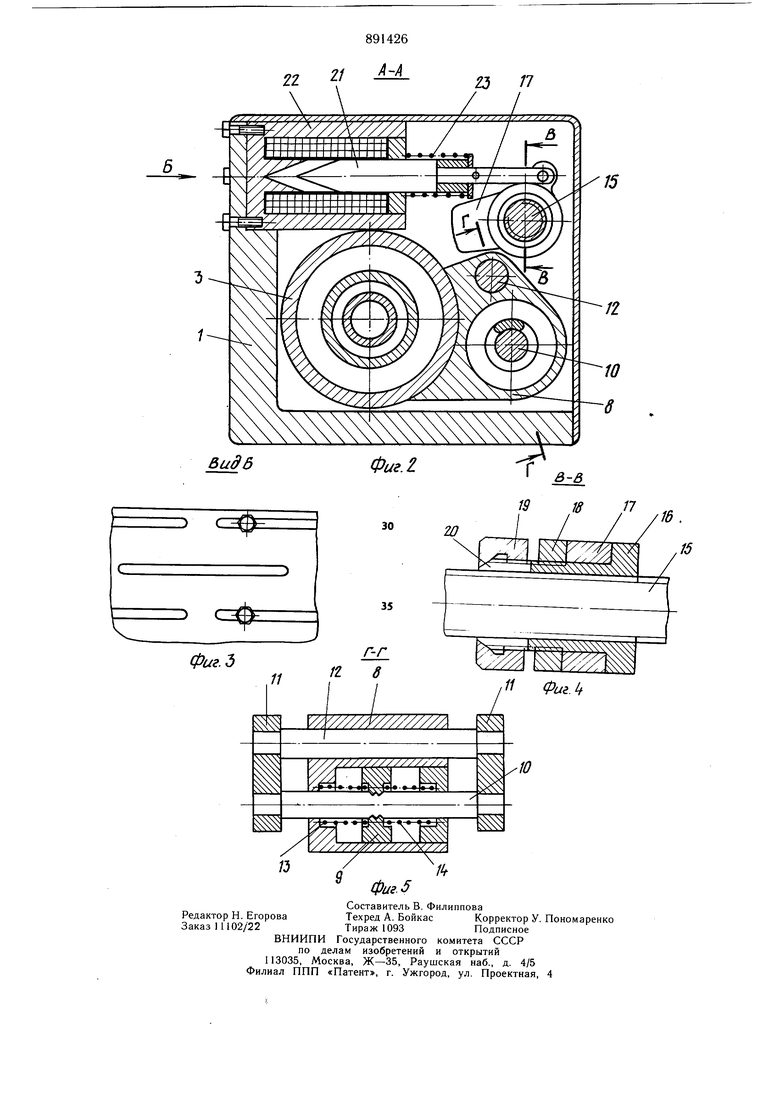
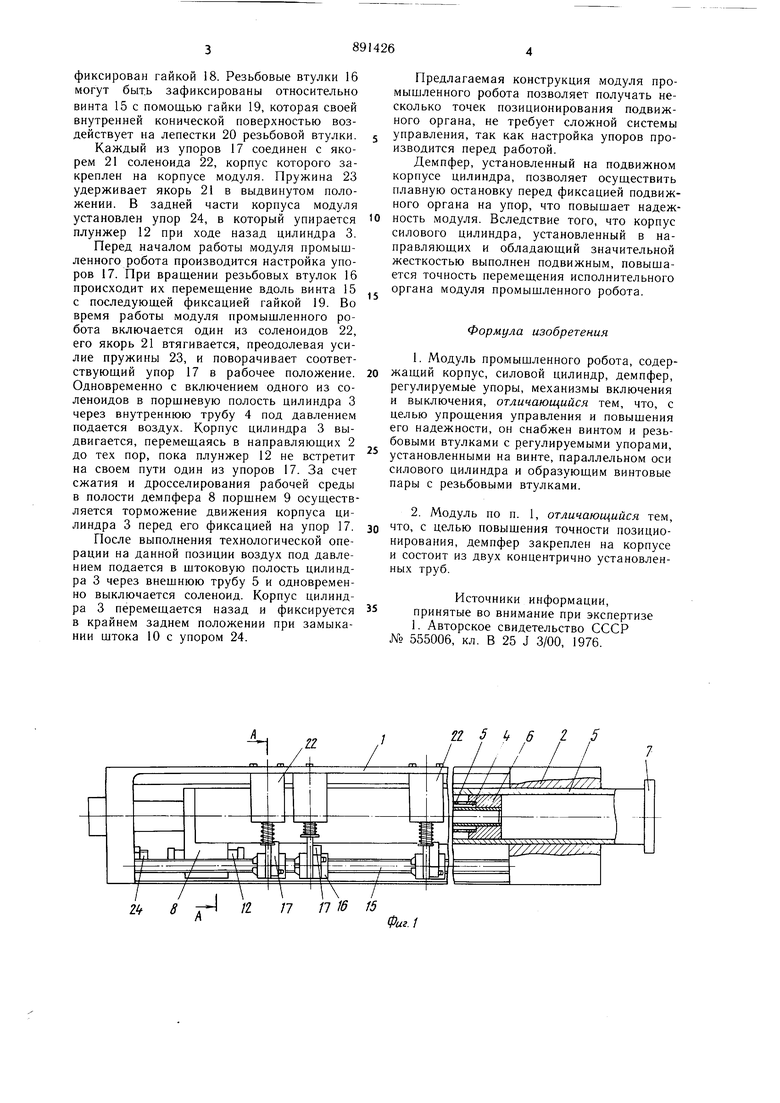
Изобретение относится к машиностроению, в частности к конструкциям промышленных роботов, и может найти применение при создании механизмов поступательного перемеш,ения. Известен модуль промышленного робота, содержащий корпус, силовой цилиндр, демпфер, регулируемые упоры, механизмы включения и выключения 1. Недостатком известного устройства является сложность управления. Цель изобретения - упрощение управления и повышение надежности устройства. Цель достигается тем, что модуль промышленного робота снабжен винтом и резьбовыми втулками с регулируемыми упорами, установленными на винте, параллельном оси силового цилиндра и образующим винтовые пары с резьбовыми втулками, причем, с целью повышения точности позиционирования, демпфер закреплен на корпусе и состоит из двух концентрично установленных труб. На фиг. 1 показано устройство предлагавмого модуля промышленного робота; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 -вид Б на фиг. 2; на фиг. 4 - сечение В-В на фиг. 2; на фиг. 5 - сечение Г-Г на фиг. 2. Предлагаемый модуль промышленного робота состоит из корпуса 1, в направляющих 2 которого установлен корпус силового цилиндра 3. Шток силового цилиндра состоит из внутренней трубы 4 и внешней трубы 5, которые, с одной стороны, соединены с поршнем 6, а с другой - закреплены на корпусе модуля. На внешнем торце цилиндра 3 установлен фланец 7, предназначенный для крепления исполнительных механизмов промышленного робота. На внутреннем торце цилиндра закреплен демпфер, состоящий из корпуса 8, в цилиндрической полости которого установлен поршень 9 со щтоком 10, через планки 11 соединенным с плунжером 12. Пружины 13 и 14, установленные в полости демпфера, стремятся удержать поршень 9 в среднем положении. Параллельно оси силового цилиндра в корпусе модуля закреплен винт 15, на резьбе которого установлены резьбовые втулки 16. Упор 17, находящийся на втулке 16, имеет возможность поворачиваться вокруг оси винта 15, а в осевом направлении зафиксирован гайкой 18. Резьбовые втулки 16 могут быть зафиксированы относительно винта 15 с помощью гайки 19, которая своей внутренней конической поверхностью воздействует на лепестки 20 резьбовой втулки. Каждый из упоров 17 соединен с якорем 21 соленоида 22, корпус которого закреплен на корпусе модуля. Пружина 23 удерживает якорь 21 в выдвинутом положении. В задней части корпуса модуля установлен упор 24, в который упирается плунжер 12 при ходе назад цилиндра 3. Перед началом работы модуля промышленного робота производится настройка упоров 17. При вращении резьбовых втулок 16 происходит их перемещение вдоль винта 15 с последующей фиксацией гайкой 19. Во время работы модуля промыщленного робота включается один из соленоидов 22, его якорь 21 втягивается, преодолевая усилие пружины 23, и поворачивает соответствующий упор 17 в рабочее положение. Одновременно с включением одного из соленоидов в порщневую полость цилиндра 3 через внутреннюю трубу 4 под давлением подается воздух. Корпус цилиндра 3 выдвигается, перемещаясь в направляющих 2 до тех пор, пока плунжер 12 не встретит на своем пути один из упоров 17. За счет сжатия и дросселирования рабочей среды в полости демпфера 8 поршнем 9 осуществляется торможение движения корпуса цилиндра 3 перед его фиксацией на упор 17. После выполнения технологической операции на данной позиции воздух под давлением подается в штоковую полость цилиндра 3 через внешнюю трубу 5 и одновременно выключается соленоид. Корпус цилиндра 3 перемещается назад и фиксируется в крайнем заднем положении при замыкании щтока 10 с упором 24.
,22
П 5 if 6 15 Предлагаемая конструкция модуля промыщленного робота позволяет получать несколько точек позиционирования подвижного органа, не требует сложной системы управления, так как настройка упоров производится перед работой. Демпфер, установленный на подвижном корпусе цилиндра, позволяет осуществить плавную остановку перед фиксацией подвижного органа на упор, что повыщает надежность модуля. Вследствие того, что корпус силового цилиндра, установленный в направляющих и обладающий значительной жесткостью выполнен подвижным, повыщается точность перемещения исполнительного органа модуля промыщленного робота. Формула изобретения . Модуль промыщленного робота, содержащий корпус, силовой цилиндр, демпфер, регулируемые упоры, механизмы включения и выключения, отличающийся тем, что, с целью упрощения управления и повыщения его надежности, он снабжен винтом и резьбовыми втулками с регулируемыми упорами, установленными на винте, параллельном оси силового цилиндра и образующим винтовые пары с резьбовыми втулками. 2. Модуль по п. 1, отличающийся тем, что, с целью повышения точности позиционирования, демпфер закреплен на корпусе и состоит из двух концентрично установленных труб. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 555006, кл. В 25 J 3/00, 1976.
