1
Изобретение относится к информационным устройствам об окружающих условиях эксплуатации транспортных средств и может быть использовано для обеспечения безопасности автоматических транспортных средств, например планетоходов, в процессе перемещения их по пересеченной местности.
Известно устройство, содержащее рычаг с установленными на нем на высоте преодолеваемых препятствий чувствительными элементами и концевые выключатели, контакты которых включены в цепи блока управления транспортным средством 1.
Однако это устройство не обеспечивает полной безопасности транспортного средства, так как не может обнаружить на своем пути впадин .рельефа, а также некоторых выступов, при наезде на них ходовой части транспортного средства, так как чувствительный элемент прикреплен к корпусу транспортного средства таким образом, что поднимается вместе с ним.
Известен сигнализатор наличия препятствий перед транспортным средством, содер-. жащий подвижный упор с приводом, рычаг с установленными на нем на высоте максимально преодолеваемых препятствии чувствительными элементами, механически связанными через рычаг с приводом упора, и концевые выключатели, контакты которых включены в цепи блока управления транспортным средством 2.
Недостатком известного устройства является -большая погрешность определения высоты препятствий, квалифицируемых как опасные, так как расположение чувствительного элемента над грунтом зависит от угла
10 наклона карпуса транспортного средства к поверхности грунта.
Целью изобретения является повышение точности обнаружения препятствий.
Эта цель достигается тем, что сигнализатор снабжен электрически связанным с приводом упора измерителя отрыва рычага от упора, ограничителями хода рычага, электрически связанными с блоком управления транспортным средством, и установленными на рычаге и механически связанными допол20нительным чувствительным элементом и измерителем углов отклонения дополнительного чувствительного элемента, включен 1ым в цепь управления приводом упора.
Кроме того, в цепь управления приводом упора включены контакты концевых выключателей и ограничителей хода рычага.
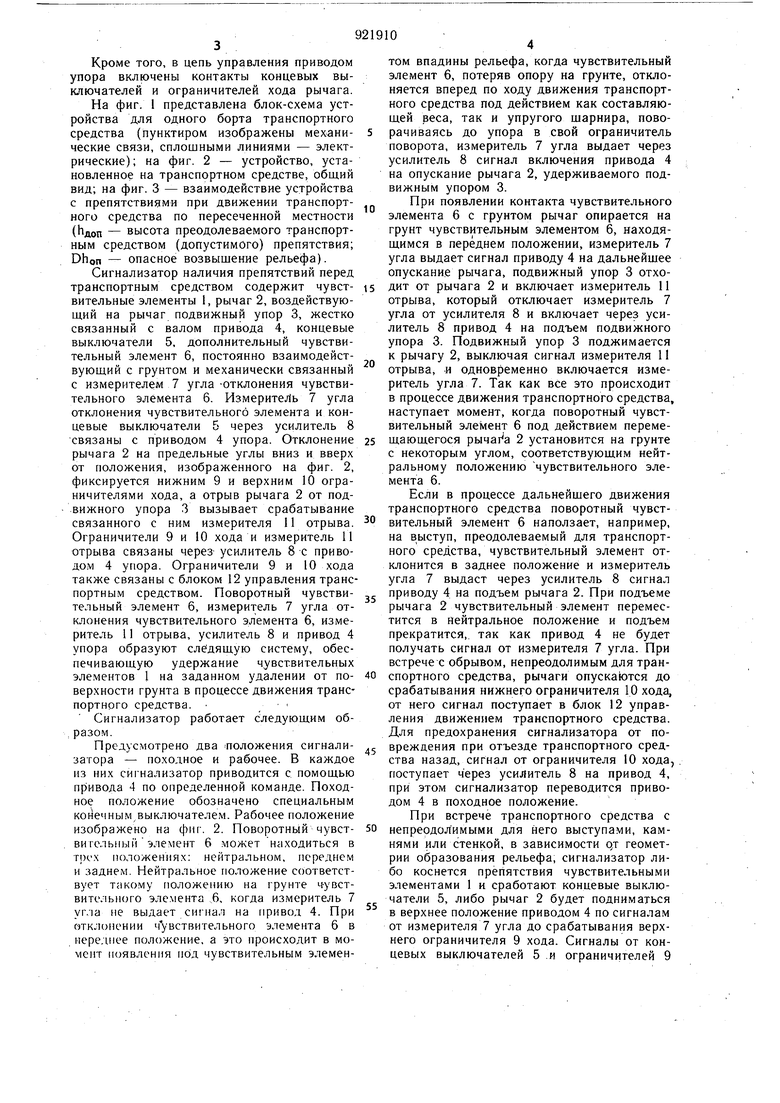
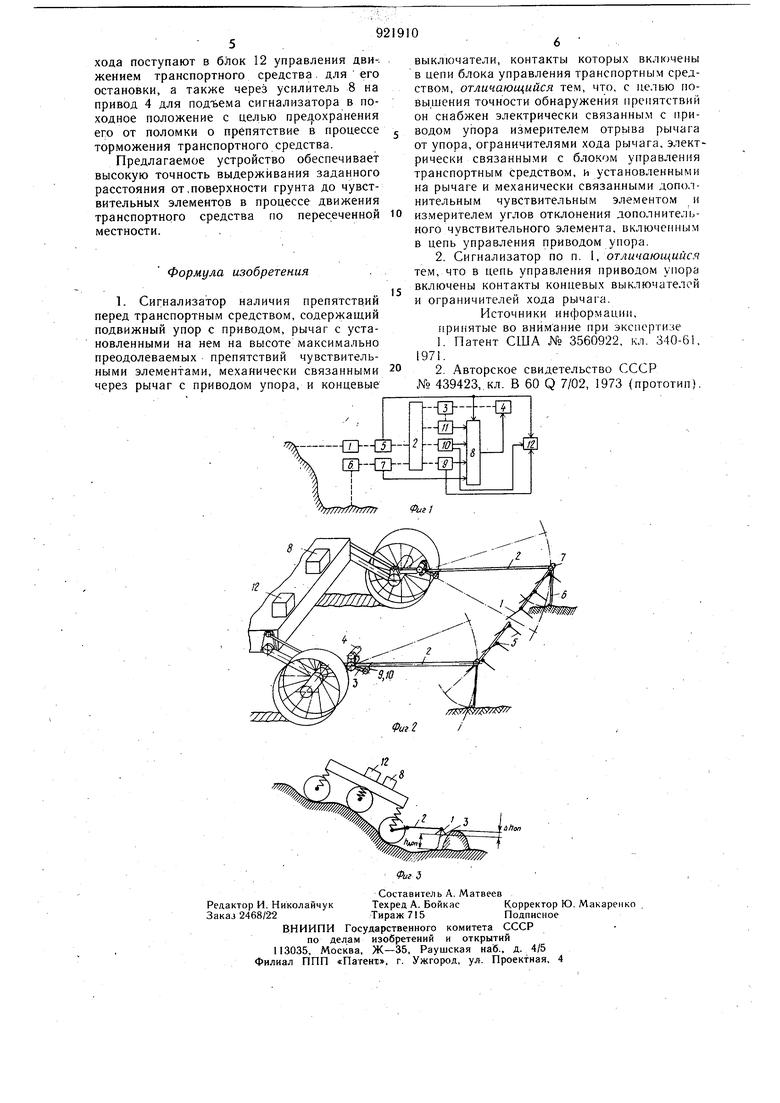
На фиг. 1 представлена блок-схема устройства для одного борта транспортного средства (пунктиром изображены механические связи, сплошными линиями - электрические); на фиг. 2 - устройство, установленное на транспортном средстве, общий вид; на фиг. 3 - взаимодействие устройства с препятствиями при движении транспортного средства по пересеченной местности (Ьдоп - высота преодолеваемого транспортным средством (допустимого) препятствия; Dhon - опасное возвышение рельефа).
Сигнализатор наличия препятствий перед транспортным средством содержит чувствительные элементы 1, рычаг 2, воздействующий на рычаг подвижный упор 3, жестко связанный с валом привода 4, концевые выключатели 5, дополнительный чувствительный элемент 6, постоянно взаимодействующий с грунтом и механически связанный с измерителем 7 угла -отклонения чувствительного элемента 6. Измеритель 7 угла отклонения чувствительного элемента и концевые выключатели 5 через усилитель 8 связаны с приводом 4 упора. Отклонение рычага 2 на предельные углы вниз и вверх от положения, изображенного на фиг. 2, фиксируется нижним 9 и верхним 10 ограничителями хода, а отрыв рычага 2 от подвижного упора 3 вызывает срабатывание связанного с ним измерителя 11 отрыва. Ограничители 9 и 10 хода и измеритель 11 отрыва связаны через усилитель 8 с приводо.ад 4 упора. Ограничители 9 и 10 хода также связаны с блоком 12 управления транспортным средством. Поворотный чувствительный элемент 6, измеритель 7 угла отклонения чувствительного элемента 6, измеритель 11 отрыва, усилитель 8 и привод 4 упора образуют следящую систему, обеспечивающую удержание чувствительных элементов 1 на заданном удалении от поверхности грунта в процессе движения транспортного средства.
Сигнализатор работает следующим об разом.
Предусмотрено два положения сигнализатора - походное и рабочее. В каждое из них сигнализатор приводится с помощью привода 4 по определенной команде. Походное положение обозначено специальным конечны.м выключателем. Рабочее положение изображено на фиг. 2. Поворотный чувствительный элемент 6 может находиться в Т1)(,Х положениях: нейтральном, переднем и заднем. Нейтральное положение соответствует т;1кому положению на грунте ч-увствительного элемента ,6, когда измеритель 7 уг.ча не выдает сигнал на привод 4. При отклонении чувствительного элемента 6 в переднее положение, а это происходит в момент появления пОд чувствительным элеменТОМ впадины рельефа, когда чувствительный элемент 6, потеряв опору на грунте, отклоняется вперед по ходу движения транспортного средства под действием как составляющей веса, так и упругого шарнира, поворачиваясь до упора в свой ограничитель поворота, измеритель 7 угла выдает через усилитель 8 сигнал включения привода 4 на опускание рычага 2, удерживаемого подвижным упором 3.
При появлении контакта чувствительного элемента 6 с грунтом рычаг опирается на грунт чувствительным элементом 6, находящимся в переднем положении, измеритель 7 угла выдает сигнал приводу 4 на дальнейшее опускание рычага, подвижный упор 3 отходит от рычага 2 и включает измеритель 11 отрыва, который отключает измеритель 7 угла от усилителя 8 и включает через усилитель 8 привод 4 на подъем подвижного упора 3. Подвижный упор 3 поджимается к рычагу 2, выключая сигнал измерителя 11 отрыва, и одновременно включается измеритель угла 7. Так как все это происходит в процессе движения транспортного средства, наступает момент, когда поворотный чувствительный элемент 6 под действием перемещающегося рычаНа 2 установится на грунте с некоторым углом, соответствующим нейтральному положению чувствительного элемента 6.
Если в процессе дальнейшего движения транспортного средства поворотный чувствительный элемент 6 наползает, например, на выступ, преодолеваемый для транспортного средства, чувствительный элемент отклонится в заднее положение и измеритель угла 7 выдаст через усилитель 8 сигнал приводу 4 на подъем рычага 2. При подъеме рычага 2 чувствительный элем«нт переместится в нейтральное положение и подъем прекратится,, так как привод 4 не будет получать сигнал от измерителя 7 угла. При встрече с обрывом, непреодолимым для транспортного средства, рычаги опускаются до срабатывания нижнего ограничителя 10 хода, от него сигнал поступает в блок 12 управления движением транспортного средства. Для предохранения сигнализатора от по5 вреждения при отъезде транспортного средства назад, сигнал от ограничителя 10 хода, поступает через усилитель 8 на привод 4, при этом сигнализатор переводится приводом 4 в походное положение.
При встрече транспортного средства с
0 непреодолимыми для него выступами, камнями или стенкой, в зависимости от геометрии образования рельефа, сигнализатор либо коснется препятствия чувствительными элементами 1 и сработают концевые выключатели 5, либо рычаг 2 будет подниматься в верхнее положение приводом 4 по сигналам от измерителя 7 угла до срабатывания верхнего ограничителя 9 хода. Сигналы от концевых выключателей 5 .и ограничителей 9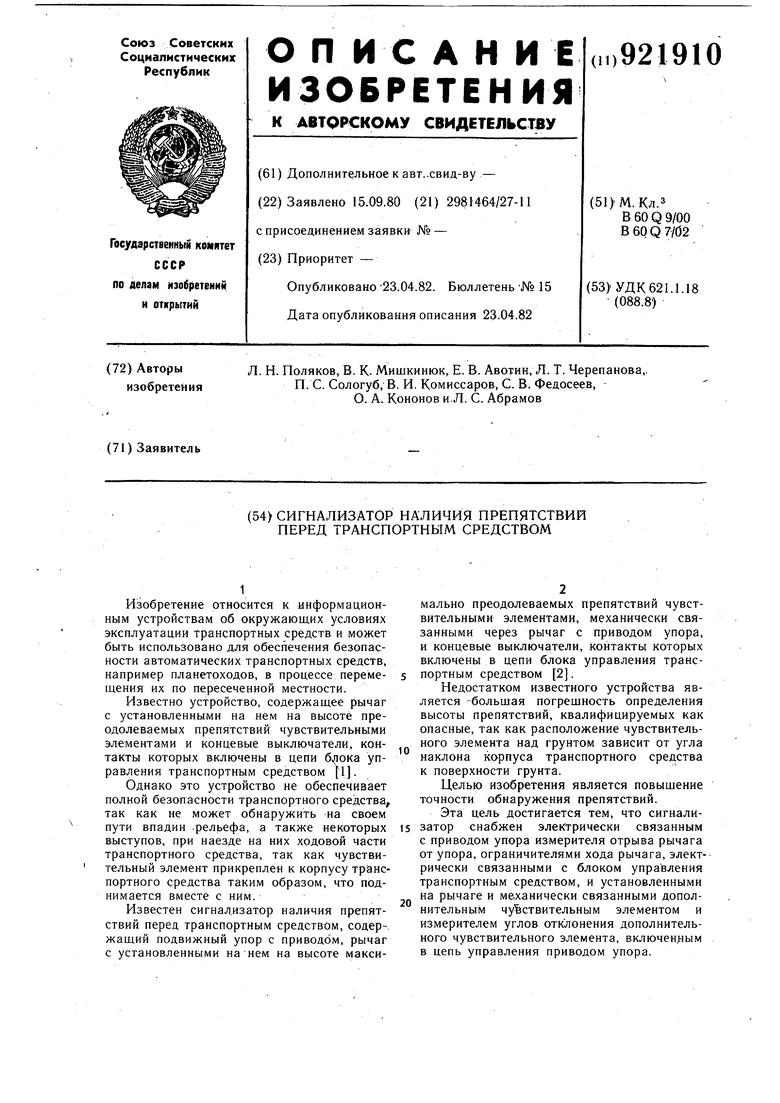
| название | год | авторы | номер документа |
|---|---|---|---|
| Сигнализатор выступающих препятствий перед транспортным средством | 1972 |
|
SU439423A1 |
| Устройство для измерения профиля местности | 1976 |
|
SU661235A1 |
| Устройство для предотвращения столкновения транспортного средства с препятствием | 1981 |
|
SU1034935A1 |
| Устройство для измерения рельефа местности | 1982 |
|
SU1089414A2 |
| Устройство для измерения рельефа местности | 1977 |
|
SU735918A2 |
| СИГНАЛИЗАТОР УРОВНЯ ЖИДКОСТИ | 2005 |
|
RU2292016C1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ ПОВЫШЕННОЙ ОПОРНОЙ И ГЕОМЕТРИЧЕСКОЙ ПРОХОДИМОСТИ | 2019 |
|
RU2705869C1 |
| БАЛАНСИРНАЯ ПОДВЕСКА ЧЕТЫРЁХКОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2666080C1 |
| Устройство для обнаружения бокового сноса транспортного средства | 1982 |
|
SU1071240A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1981 |
|
RU1055199C |
