;
Изобретение относится к инфс мационным системам об окружающих условиях движения и может быть использовано для измерения рельефа местности в процессе движения подвижной платформы.
Из основного авт. св. № 64995О известно устройство для измерения рельефа местности, включающее в себя подвижную платформу с пластичнътми колесами, измеритель-преобразователь, на входы которого подключены выходы датчиков деформации эластичного копеса, горизонта по крену, горизонта по дисрференту и один из выходов датчика хода подвески, другой выход датчика хода подвески связан с входом датчика деформации эластичного колёса, а выход вэыегрителя преобразователя соединен с дат чиком пути через интегратор.
Однако в этом устройстве датчик деформации эластичного колеей измеряет деформацию колеса, обусловленную только нагрузкой, которая передается на колесо.от подвижной платфсфмы через подвеску. Кроме этой нагрузки на колесо еще действует инерционная сила, прилохсейная к его центру тяжести, величина которой зависит от массы и вертикального ускорения колеса. Так как в процессе движения по пересеченной поверхности колесо совершает непрерывные вертикальные колебания, это неизбежно приводит к появлзшЕЮ вертикального инерционноГЧ усилия, величина которого в некотоtoрых ситуациях может оказаться соизмеримой с величиной нагрузки, действующей йа колесо от подвижной платформы. Поэтому измерение рельефа местности с поМсхшыо этого устройства неизбежно бу15дут гцзоизводи ся с погрещностью.
Цель изобретения - повыщение точности измерения рельефа местности.
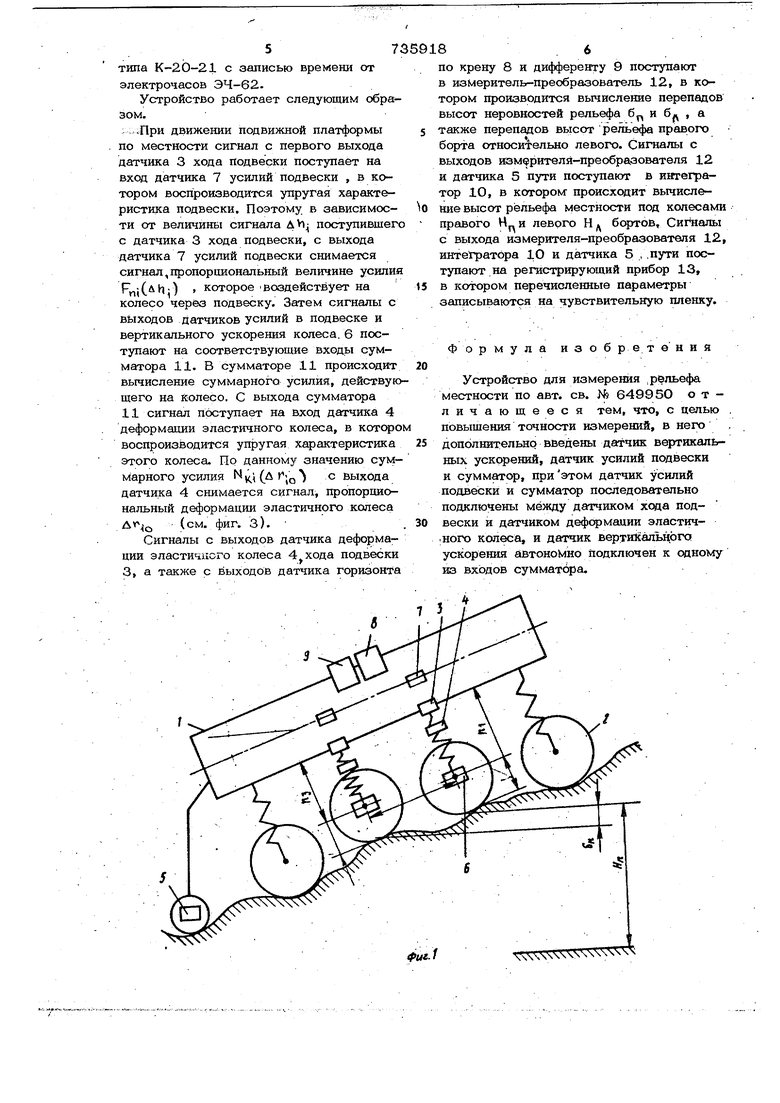
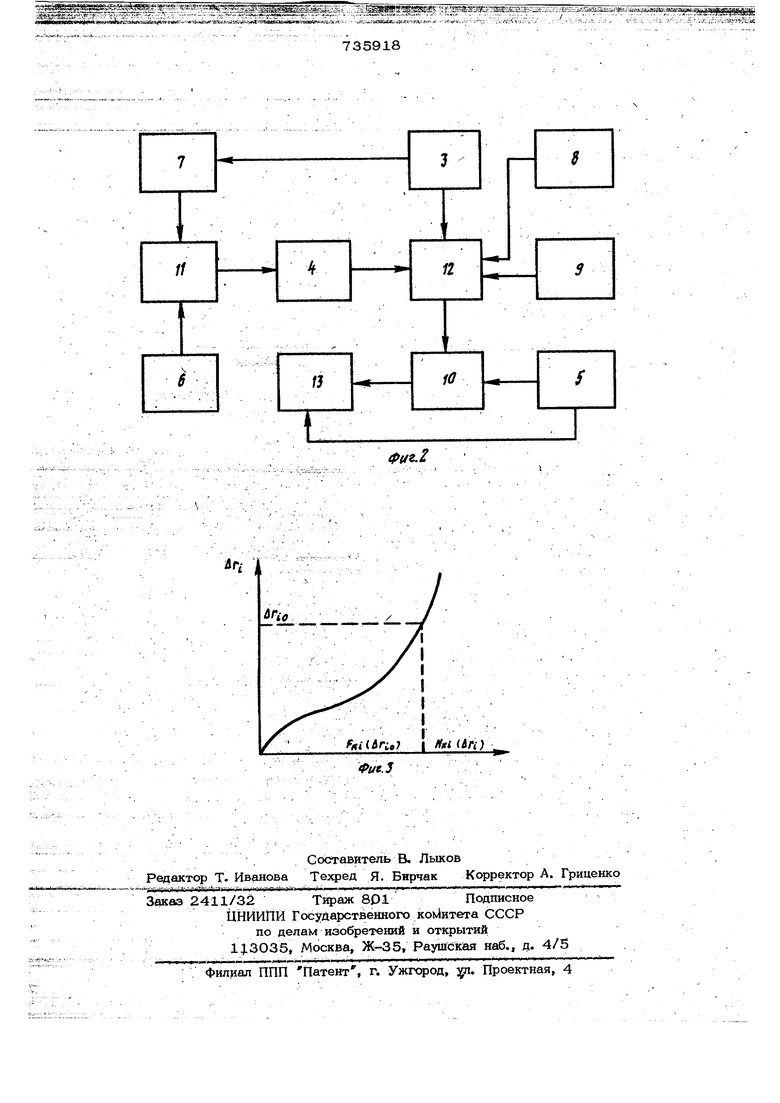
Эта цель достигается тем, что оно допоАШЕтепьно снабжено датчиком вертикальных ускорений, установленным на стушще колеса, датчиком усилия подвески с .сумматором,, при этом выход датчика вертикальных ускорений через сумматор,- а другой выход датчика хода подвески через последовательно соединенны датчик усилия подвески и сумматор соединены с входом датчика деформации эластичного колёса. На фиг. 1 показана подвижная платформа с установленными на ней элементами измерения рельефа местности, общий вид; на фиг. 2 структурная схема устройства для измерения рельефа местности; на фиг. 3 - характеристика упругЬго элемента f -го эластичного колеса Устройство для измерения рельефа местности, установленное на, подвижной платформе 1 с эластичными колесами 2, состоит из датчиков, регистрирукйцих ход подвески, 3, деформацию эластичного колеса 4, прюйденный путь 5, вертикально ускорение колеса 6, усилие подвески 7, датчиков горизонта по крену 8 и дифференту 9, а также интегратора 10, сумматора 11 измерителя-преобразователя 12 и регистрирующего прибора 13. Датчики 3 служат для измерений ход подвески относительно подвижной платформы и устанавливаются на подвесках средних колес многоопорной подвижной платформы, (для уменьшения влияния отрыва колес от грунта) и на всех колеса если подвижная платформа двухосная. В качестве датчиков хода подвесок могут бытьпримененьг, например, стандартные вращающиеся трансформаторы типа 5МВТ . или сельсины типа БС-7. Датчики 4 определяют деформацию эластичного колеса через усилие подвеск и вертикальное ускорение соответствующего колеса. Конструктивно дахчик деформации эластичного колеса может быт выполнен в виде электронного блока нелинёйностей, воспроизводящего упругую характеристику данного колеса. В качестве такого блока нелинейности ожет быть использована, например, стандартная вставка функционального преобразователя (ВФП), входящая в комплект набора блока нелинейности серии НБН-1 Датчик пути 5 служит для измерения пройденного расстояния и может быть выполнен, например, в виде свободно катящегося колеса со счетчиком оборотов. Датчик вертикально1Х) ускорения 6 предназначен для измерения Вертикального ускорения, действующего на колесо в процессе го перемещения по поверхности. В качестве такого датчика может быть использован стандартный датчик линейных ускорений типа МП-68. Датчик 7 усилия подвески служит для, измерения усилия, которое передается от подвижной платформы на колесо через подвеску. Это усилие датчиком 7 определяется по информации, которая в него поступает от датчика 3 хода подвески. В качестве датчика 7, также как и в качестве датчика 4 деформации эластичного колеса, могут быть использованы Эставки функциональных преобразователей входящие в комплект блоков нелинейное- тей серии НБН-1, которые воспроизводят упругую характеристику подвески. Датчики горизонта по крену 8 и дифференту 9 служат для измерения углов наклона подвижной платформы в поперечной и продольной плоскостях. В к1ачестве этих датчиков может быть применен датчик для измерения угловых перемещений типа ДК-6МТ или гироскоп, снабженный маятниковой коррекцией. .Интегратор 10 определяет высоты (координаты) рельефы местности под ко- лесами подвижной платформы правого, а также левого бортов и может быть выполнен в виде катодного повторителя с переменной емкостью. Управление процессом интегрирования в интеграторе осуществляется по сигналам, поступающим от датчика 5 пути. Сумматор 11 предназначен для определения суммарного усилия на колесе, которое складывается Из нагрузки, передаваемой от подвижной платформы через подвески, и инерционной силы, действующих на это колесо. Передаваемая от подвижной платформы нагрузка определяется 6 помощью датчи.ка 7 усилия подвески, а инерционная сила с помощью датчика 6 вертикального ускорения. Сумматор 11 может быть выполнен, например, на операционйом усилителе типа 1УТ402. Измеритель-преобразователь 12 определяет перепады высот неровностей рельефа местности под колесами подвижной платформы в вертикально-продольной и вертикально-поперечной плоскостях в темпе ее движения., Регистрирующий прибор 13 предназначен для регистрации координат профиля под колесами правого и левого бортов, а также перепадов высот рельефа местности между правым и левым бортами. Регистрирующее устройстйо связано с интегратором, измерителем-преобразователем и датчиком пути. В качестве регистрирующего устройства может быть применен осциллограф
типа К-20-21 с записью времени от электрочасов ЭЧ-62.
Устройство работает следующим образом.
;-.При движении подвижной платформы
по местности сигнал с первого выхода датчика 3 хода подвески поступает на вход датчика 7 усилий подвески , в котором воспроизводится упругая характеристика подвески. Поэтому, в зависимоети от величины сигнала AVi поступившего с датчика 3 хода подвески, с выхода датчика 7 усилий подвески снимается сигнал,пропорциональный величине усилия Р„|(лИ-) которое Воздействует на
колесо через подвеску. Затем сигналы с выходов датчиков усилий в подвеске и вертикального ускорения колеса. 6 поступают на соответствующие входы сумматора 11. В сумматоре 11 происходит вычисление суммарного усилия, действующего на колесо, С выхода сумматора 11 сигнал поступает на вход датчика 4 деформации эластичного колеса, в которо воспроизводится упругая характеристика этого колеса. По данному значению суммарного усилия N ji; (д pjQ с выхода датчика 4 снимается сигнал, пропорциональный деформации эластичного колеса (см. фиг. З).
Сигналы с выходов датчика деформации зластичисго колеса подвески 3, а также с выходов датчика горизонта
по крену 8 и дифференту 9 поступают в измеритель-преобразователь 12, в котором прюизврдится вычисление перепадов высот неровностей рельефа б, и б. , а также перепадов высот рельефа правого борта относительно левого. Сигналы с выходов измерителя-преобразователя 12 и датчика 5 пути поступают в интегратор Ю, в котором происходит вычисление высот рельефа местности под колесами правого W и левого Н бсртов. Сигналы с выхода измерителя-преобразователя 12, интегратора 10 и датчика 5 /.пути поступают на регастрирующий прибор 13, в котором перечисленные параметры записываются на чувствительную пленку.
Формула изобретения
Устройство для измерения , рельефа местности по авт. св. № 649950 отличающееся тем, что, с целью повышения точности измерений, в него дополнительно введены датчик вертикальных ускорений, датчик усилий подвески и сумматор, при этом датчик усилий подвески и сумматор последовательно подключены между датчиком хода подвески и датчиком деформации эластич.ного колеса, и датчик вертикального ускорения автономно подключен к одному на входов сумматора.
735918
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения рельефаМЕСТНОСТи | 1979 |
|
SU847035A2 |
| Устройство для измерения рельефа | 1976 |
|
SU649950A1 |
| Устройство для измерения рельефа местности | 1986 |
|
SU1339395A2 |
| Устройство для измерения профиля местности | 1986 |
|
SU1483259A1 |
| Устройство для измерения рельефа местности | 1982 |
|
SU1089414A2 |
| Устройство для предотвращения опрокидывания транспортного средства | 1976 |
|
SU770857A1 |
| Устройство для измерения профиля местности | 1976 |
|
SU661235A1 |
| Способ определения динамического взаимодействия транспортного средства с опорной поверхностью и устройство для его осуществления | 1988 |
|
SU1622794A1 |
| Устройство прогнозирования положения транспортного средства при движении по пересеченной местности | 1980 |
|
SU893595A1 |
| Устройство для предотвращения столкновения автоматического транспортного средства с препятствиями | 1982 |
|
SU1062758A1 |
Лг,- j
ЙЛ
to
.:. . i V
fMi(&rieJ I /(ft (An)
