(54) ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| КРЕПЕЖ | 2008 |
|
RU2381983C1 |
| Захватное устройство для контейнеров | 1976 |
|
SU663655A1 |
| Захватное устройство для контейнеров | 1973 |
|
SU484161A1 |
| Захват-кантователь для колонн | 1982 |
|
SU1071568A1 |
| Грузозахватное устройство | 1983 |
|
SU1122603A1 |
| Захват-кантователь для контейнеров с цапфами | 1984 |
|
SU1221178A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| Захватное устройство для контейнеров | 1990 |
|
SU1791336A1 |
| Захватное устройство для изделий с отверстием | 1984 |
|
SU1162730A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
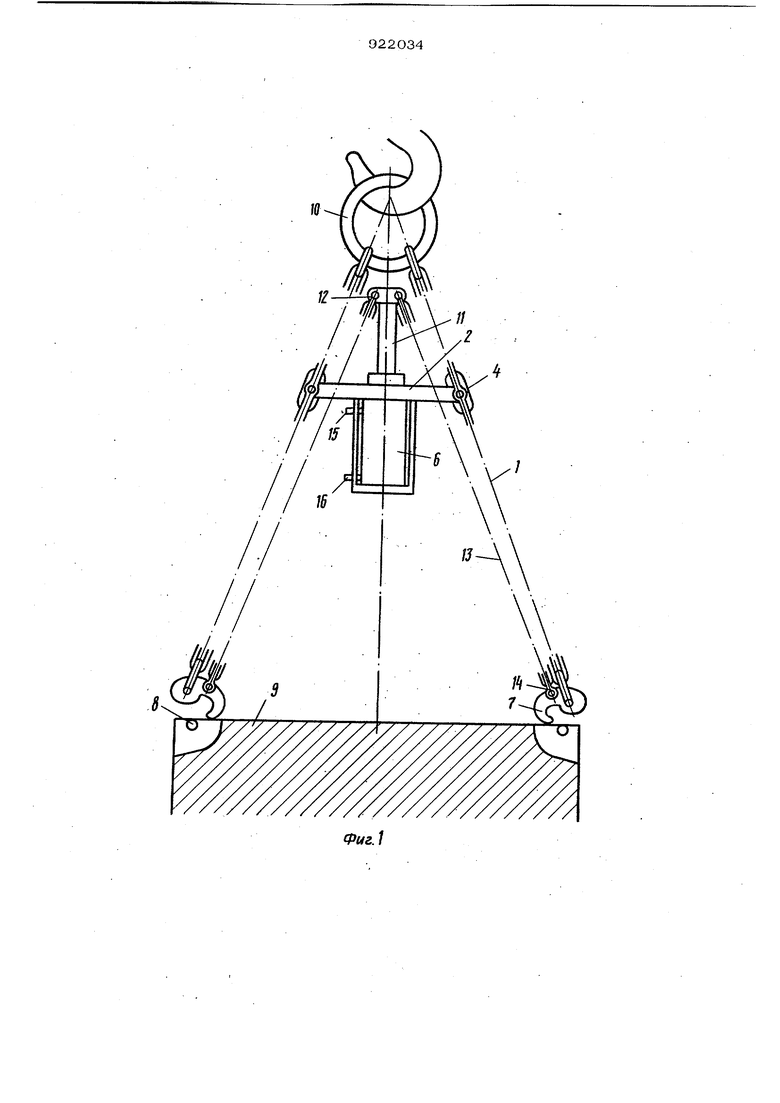
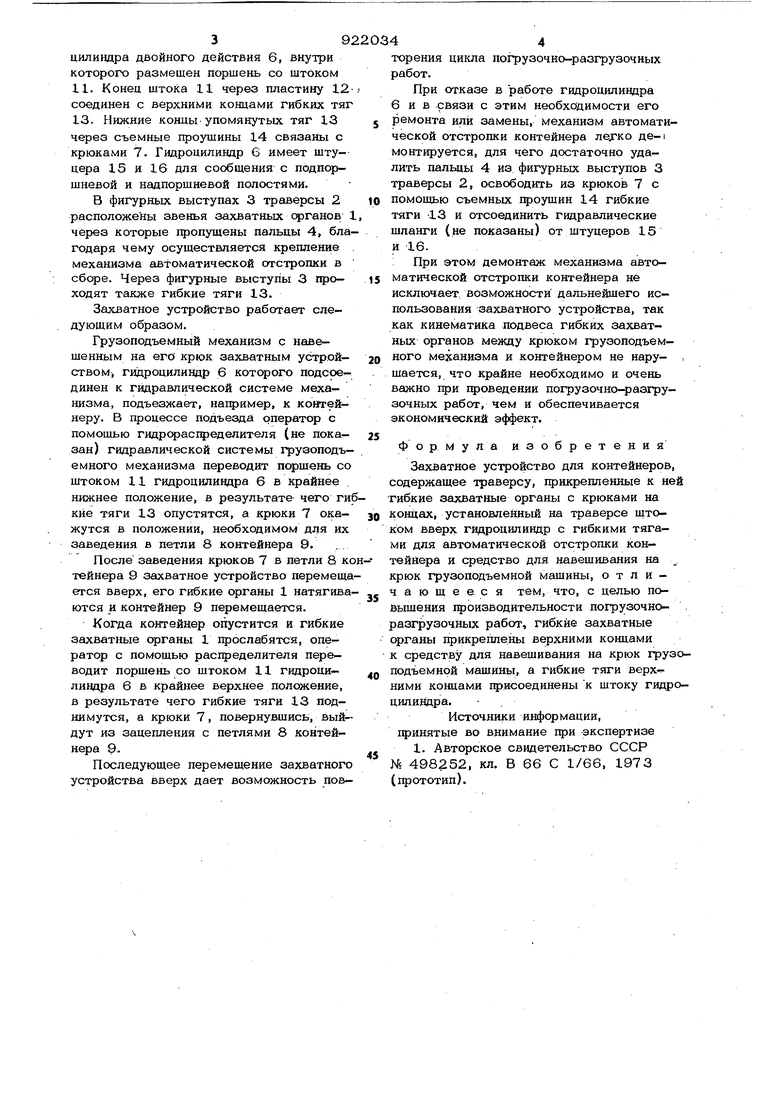
Изобретение относится-к подъемнотранспортной технике в частности к за хватным устройствам для контейнеров. Известно захватное устройство для контейвфов, содержащее траверсу, прикрепленные к ней две пары гибких захватных органов с крюками на концах, установленный на траверсе штоком вверх гидроцилиндр для автоматической отстроп ки контейнера и средство для навёшивания на крюк грузоподъемной машины l Недостатком известного устройства, . является то, что шток подвергается удар ным нагрузкам за счет соприкосновения с верхней стенкой контейнера. Кроме того, в этом устройстве демонтаж неисправного гидроцилиндра исключает возможность дальнейшего использования захватного устройства. Цель изобретения - увеличение производительности погрузочно-фазгрузочных работ за счет исключения простоев при отказе механизма автоматической от- стропки. Указанная цель достигается тем, что гибкие захватные органы прикреплены верхними концами к средству для навешивания на крюк грузоподъемной машины, . а гибкие тяги верхними концами присоединены к штоку гидроциландра. На фиг. 1 изображено предлагаемое захватное устройство; на фиг. 2 - траверса, .вид сверху; на фиг. 3 - узел соединения гибкой тяги с крюком. Захватное устройство имеет гибкие захватные органы 1 с укрепленной на них траверсой 2., имеющей фигурные выступы 3 с расположенными в них пальцами 4, и отверстия 5 для крепления гидроцилиндра 6. Нижние концы гибких, захватных органов 1 соединены с крюками 7, предназначенными для заведения в петли 8 контейнера 9, а верхние - с кольцом 1О, навешиваемым на крюк грузоподъемного механизма. Механизм автоматической отстропки контейнера выполнен в виде вертикаль но укрепленного на траверсе 2 гидроцилиндра двойного действия 6, внутри которого размещен поршень со штоком 11. Конец штока 11 через пластину 12 соединен с верхними концами гибких тяг 13. Нижние концы упомянутых тяг 13 через съемные проушины 14 связаны с крюками 7. Гидроцилиндр G имеет штуцера 15 и 16 для сообшения с подпоршневой и надпоршневой полостями. В фигурных выступах 3 траверсы 2 расположены звенья захватных органов через которые пропущены пальцы 4, бла годаря чему осуществляется крепление механизма автоматической отстропки в сборе. Через фигурные выступы 3 гфоходят также гибкие тяги 13. Захватное устройство работает следующим образом. Грузоподъемный механизм с навешенным на его крюк захватным устрой- CTBOMj гидроцилиндр 6 которого подсоединен к гидравлической системе механизма, подъезжает, например, к контейнеру. В процессе подъезда оператор с помощью гидpqpacIфeдeлитeля (не показан) гидравлической системы грузоподъемного механизма переводит порщень со штоком 11 гидроцилиндра 6 в крайнее нижнее положение, в результате- чего ги кие тяги 13 опустятся, а крюки 7 окажутся в положении, необходимом для их заведения в петли 8 контейнера 9. После заведения крюков 7 в петли 8 к тейнера 9 захватное устройство перемещ ется вверх, его гибкие органы 1 натягива ются и контейнер 9 перемещается. Когда контейнер опустится и гибкие захватные органы 1 прослабятся, оператор с помощью рас1феделителя переводит поршень со штоком 11 гидроцилиндра 6 в крайнее верхнее положение, в результате чего гибкие тяги 13 поднимутся, а крюки 7, повернувшись, выйдут из зацепления с петлями 8 контейнера 9Последующее перемещение захватного устройства вверх дает возможность повторения цикла погрузочно-разгрузочных работ. При отказе в работе гидроцилиндра бив связи с этим необходимости его ремонта или замены, механизм автоматической отстропки контейнера де-i монтируется, для чего достаточно удалить пальцы 4 из фигурных выступов 3 траверсы 2, освободить из крюков 7 с помощью съемных проушин 14 гибкие тяги -13 и отсоединить гидравлические шланги {не показаны) от штуцеров 15 и 16. ; При этом демонтаж механизма автоматической отстропки контейнера не исключает возможности дальнейшего использования захватного устройства, так как кинематика подвеса гибких захватных органов между крюком грузоподъемного механизма и контейнером не нару- , шается, что крайне необходимо и очень важно при гфоведении погрузочно-разгрузочных работ, чем и обеспечивается экономический эффект. формула изобретения Захватное устройство для контейнеров, содержащее траверсу, прикрепленные к ней гибкие захватные органы с крюками на концах, установленный на траверсе щтоком вверх гидроцилиндр с гибкими тягами для автоматической отстропки контейнера и средство для навешивания на крюк грузоподъемной машины, отличающееся тем, что, с целью повышения хфоизводительности погрузочноразгрузочных работ, гибкие захватные органы прикреплены верхними концами к средству для навешивания на крюк грузоподъемной машины, а гибкие тяги верхними концам.и присоединены к штоку гидроцилиндра. Источники информации, хфинятые во внимание при экспертизе 1. Авторское свидетельство СССР № 498252, кл. В 66 С 1/66, 1973 (прототип).
ш
