(54) КРАН-МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран-манипулятор | 1976 |
|
SU614015A1 |
| Кран-манипулятор | 1978 |
|
SU933622A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| Кран-манипулятор | 1984 |
|
SU1252289A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158708C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2001 |
|
RU2199484C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
1
Изобретение относится к подъемнотранспортному машиностройнию, а именно к кранам-манипуляторам для монтажных и погрузочно-разгрузочных работ. .
Известен кран-манипулятор, содержащий колонку с установленным на ней поворотным оголовком с вертикальными и,горизонтальными - направляющими, стрелу из шарнирно сочлененных звеньев, на свободных концах которых смонтированы катки, взаимодействующие с упомянутыми направляющими, грузозахватный орган, рукоять и пульт управления 1.
Недостатком известного крана является недостаточная прочность в связи с выполнением пазов для направляющих на оголовке, что снижает надежность работы устройства.
Цель изобретения - повышение надежности работы крана.
Цель достигается тем, что кран снабжен дополнительным приводом и смонтированными на оголовке двумя разноплечими рычагами, на нижних концах которых щарнирно подвещена одна из частей горизонтальной направляющей, при этом бдин из верхних
концов упомянутых -рычагов соединен с дополнительным приводом, а другой подпружинен..
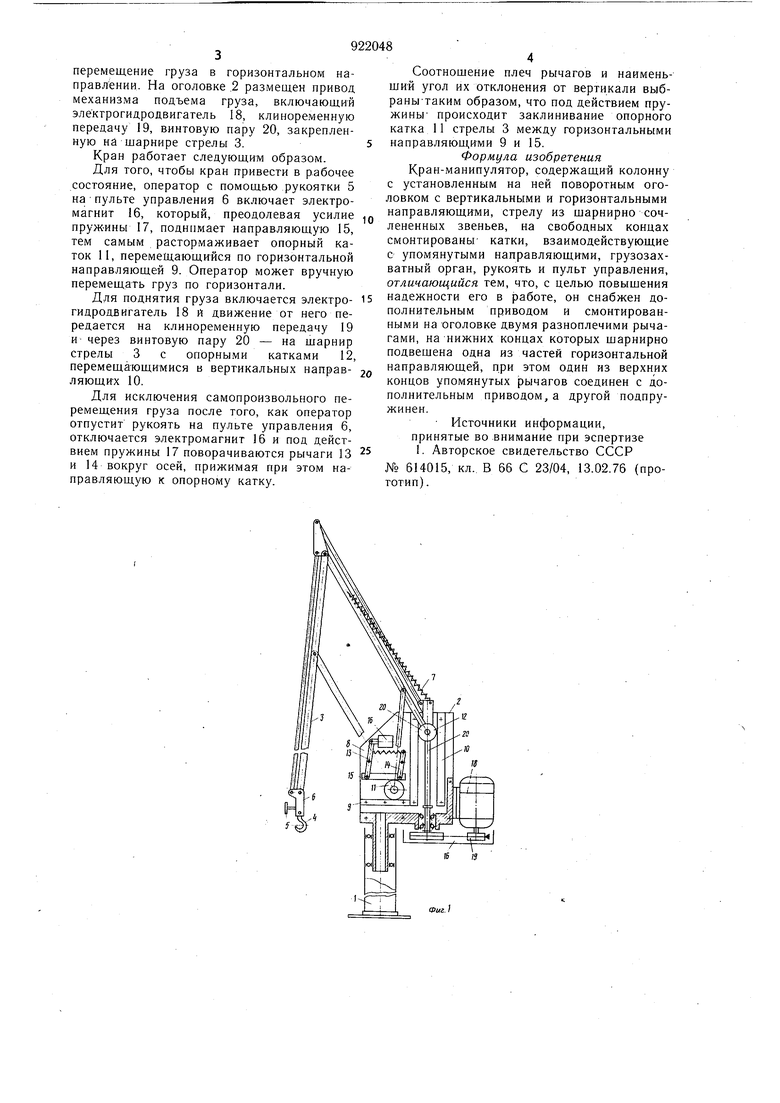
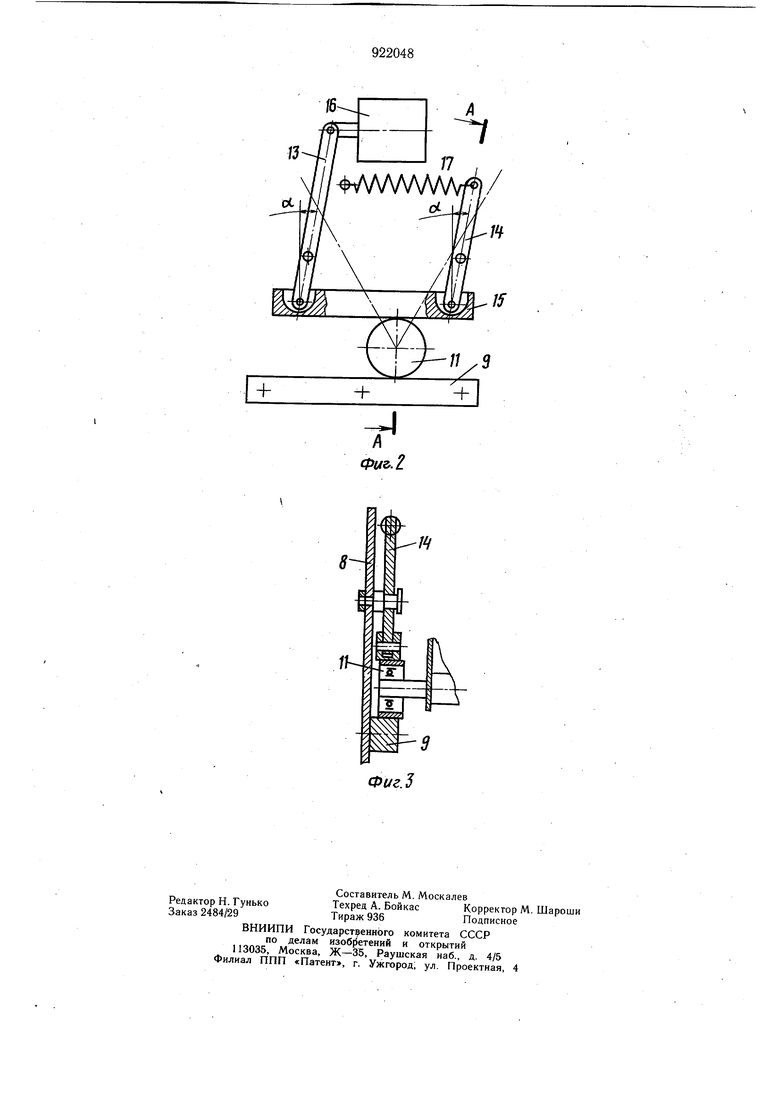
На фиг. 1 -- изображен кран, общий вид; на фиг- 2 - механизм уравновешивания
стрелы; на фиг. 3 - разрез А-А на фиг. 2.
Кран-манипулятор содержит поворотный
на колонне 1 оголовок 2 с закрепленной на
нем шарнирно-сочлененной стрелой 3 с
захватным органом 4, pyкoяtкoй 5 на пульте управления 6. Масса стрелы уравновеще на двумя пружинами 7. Оголовок 2 выполнен из двух боковых щек 8, закрепленный на корпусе, на внутренней поверхности которых расположены две горизонтальные направляющие 9 и вертикальные направ:
ляющие 10, по которым перемешаются опорные катки 11 и 12, установленные-на шарнирах стрелы 3. Параллельно направляющим 9 на рычагах 13 и 14 шарнирно закреплена направляющая 15. Рычаг 13 соединен с
20 электромагнитом 16, рычаг 14 - с пружиной 17. Опорные катки 11 и 12, направляю/ щая 15,рычаги 13 и 14 и электромагнит 16 образуют механиз.м уравновешивания, за счет которого исключается произвольное перемещение груза в горизонтальном направлении. На оголовке 2 размещен привод механизма подъема груза, включающий элекгрогидродвигатель 18, клиноременную передачу 19, винтовую пару 20, закрепленную ни щарнире стрелы 3. Кран работает следующим образом. Для того, чтобы кран привести в рабочее состояние, оператор с помощью рукоятки 5 на пульте управления 6 включает электромагнит 16, который, преодолевая усилие пружины 17, поднимает направляющую 15, тем самым растормаживает опорный каток 11, перемещающийся по горизонтальной направляющей 9. Оператор может вручную перемещать груз по горизонтали. Для поднятия груза включается электрогидродвигатель 18 и движение от него передается на клиноременную передачу 19 и через винтовую пару 20 - на шарнир стрелы 3 с опорными катками 12, перемещающимися в вертикальных направЛЯЮЩИХ 10. Для исключения самопроизвольного перемещения груза после того, как оператор отпустит рукоять на пульте управления 6, отключается электромагнит 16 и под действием пружины 17 поворачиваются рычаги 13 и 14 вокруг осей, прижимая при этом направляющую к опорному катку. Соотнощение плеч рычагов и наименьщий угол их отклонения от вертикали выбранытаким образом, что под действием пружины происходит заклинивание опорного катка 11 стрелы 3 между горизонтальными направляющими 9 и 15. Формула изобретения Кран-манипулятор, содержащий колонну с установленным на ней поворотным оголовком с вертикальными и горизонтальными направляющими, стрелу из щарнирно сочлененных звеньев, на свободных концах смонтированы катки, взаимодействующие с упомянутыми направляющими, грузозахватный орган, рукоять и пульт управления, отличающийся тем, что, с целью повышения 2.°.™... . 5.. полнительным приводом и смонтированными на оголовке двумя разноплечими рычагами, на нижних концах которых шарнирно подвешена одна из частей горизонтальной направляющей, при этом один из верхних концов упомянутых рычагов соединен с дополнительным приводом,а другой подпружинен. Источники информации, принятые во внимание при эспертизе 1. Авторское свидетельство СССР № 614015, кл. В 66 С 23/04, 13.02.76 (прототип).
/3
ю
Фиг.д
