(54) КРАН-МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран-манипулятор | 1980 |
|
SU922048A1 |
| Кран-манипулятор | 1978 |
|
SU933622A1 |
| КРАН-МАНИПУЛЯТОР (ВАРИАНТЫ) | 2013 |
|
RU2547100C1 |
| Переносной кран | 1980 |
|
SU935452A1 |
| Башенный кран | 1988 |
|
SU1595786A1 |
| ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2728851C1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| Кран-манипулятор | 1989 |
|
SU1634624A1 |
| Крановая установка | 1986 |
|
SU1361103A1 |
| Способ продавливания трубопроводов и устройство для его осуществления | 1984 |
|
SU1209778A1 |
1
Изобретение относится к подъемно-тран- спортному машиностроению, а mvieHHo к устройствам, предназначенным для вьтол; нения монтажных и погрузочно-разгрузочных операций.
Известен кран-манипулятор, содержащий колонну, на оголовке которой установлена.. стрела с шарннрно сочлененными звеньями l
Недостатком крана является то, что груз подвешен на.некоторой консоли, отчего нарушается равновесиеун система становится подвижной. Это непроизвольное движение подвешенного груза опасно для опербтора, обслуживающего подъемный Яеханизм,
Целью изобретения является предотвращение раскачивания траислортнруемого ,
Цель достигается тем, что оголовок вь полнен с горизонтальным направляющим , а кран снабжен расположенным на огрловке колонны механизмом уравновешивания состоящим из жестко связанного со звеном стрелы опорного катка, наружного и внутреннего тормозных конусных дисков, причем последний вьтолнен эа ооно целое с опорным катком, Неремешаюшимся в грризонтельном направляющем пазу.
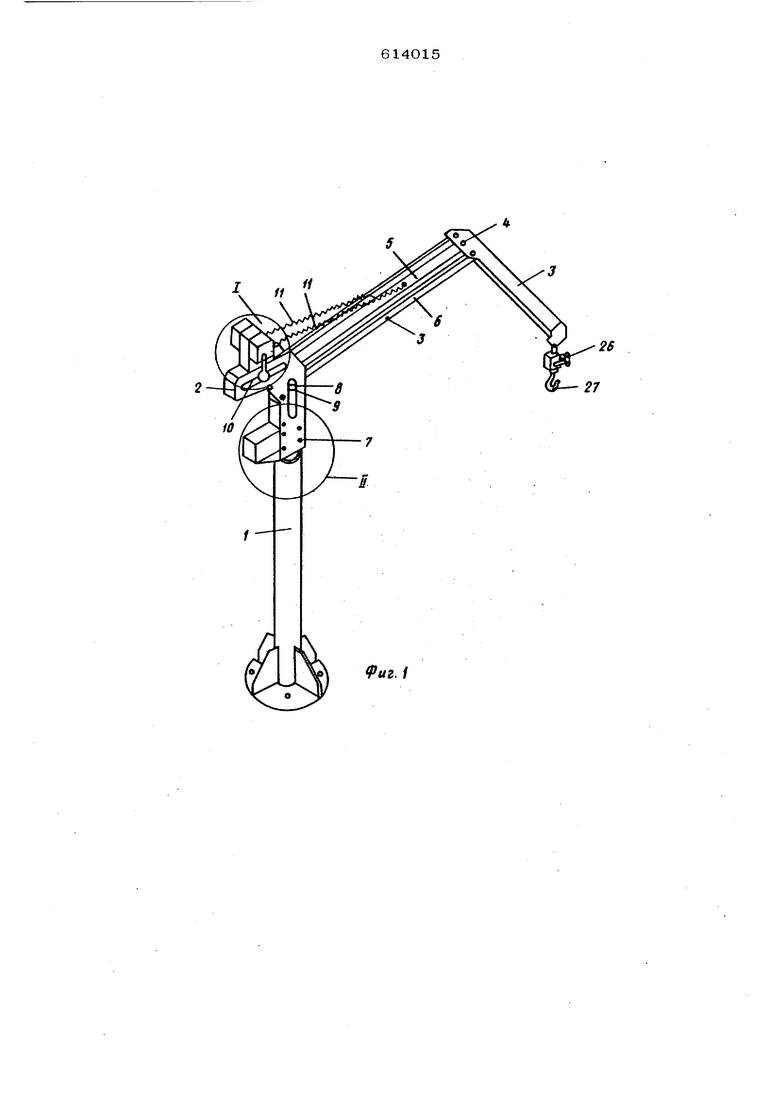
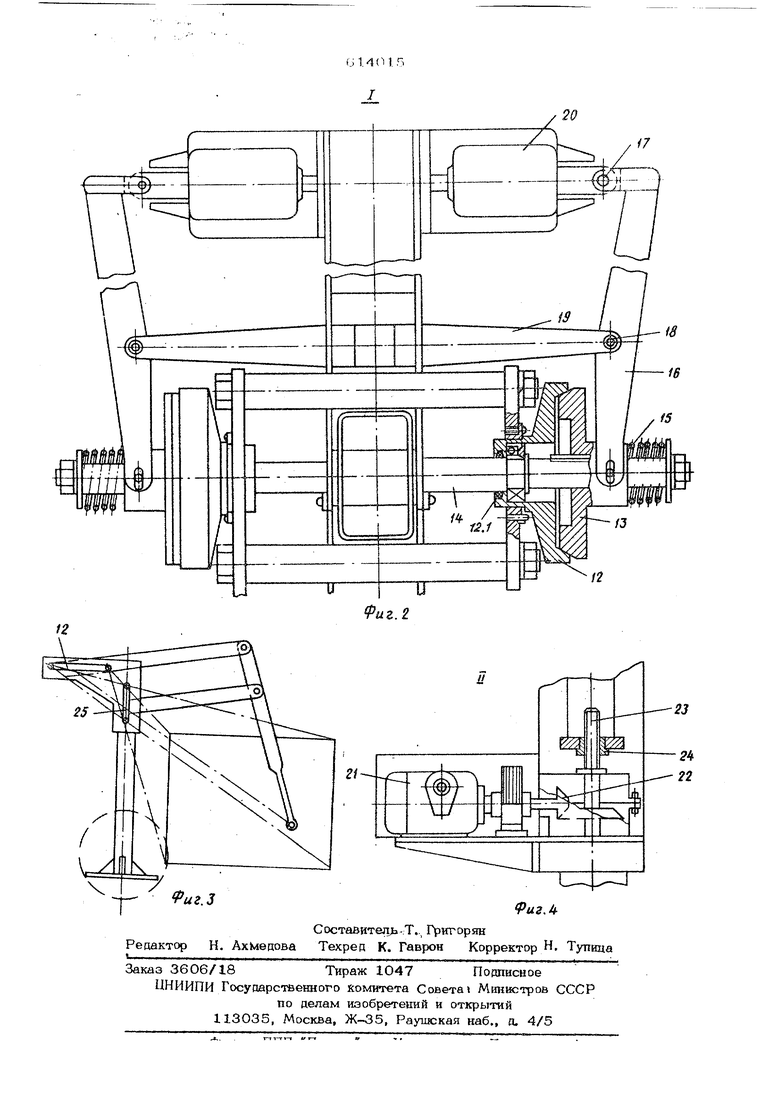
На фиг. 1 изображен кран-манипулятор, общий вид; на фиг. 2 - механизм уравновешивания (узел I фиг. I}; на фт. 3 |сннематическая схема зоны действия крана-ччанипулятора; на фиг. 4 - механизм подъема (узел )1 фиг. ).
Кран-манштулятор состоит из стационарно установленной колонны 1, в верхней части которой расположен оголовок 2 со звеньями стрелы 3, соединенными между собой шарннрамн 4. В свою очередь осшо
из звеньев стрелы 3 состоит из верхнего 5 и нижнего 6 з&еньев.
Оголовок 2 выполнен из двух, соединенных между собой болтами 7, боковых; щек 8, в которых имеются вертикальные
9 и Горизонтальные 10 направляющие пазы.
С целью частичной балансировки массы стрельь звено 5 при помощи пружин 11 соединено с расположенным на оголовке 2 механизмом урбшновешивания, состояшетч)
из внутренних 12 и наружных 13 тормозных конусных дисков, насаженных на ось 14 н поджимаемых пру7кинами 15.
Внутренний конусный диск 12 выполнен за одно целое с опорным катком 12, 1, который жестко связан звеном 5 стрелы и перемешается в горизонталыюм направляющем пазу 10, На наружных конусных дисках 13 закреплены тяги 16, которые соответственно с помошыо шаршфов 17 и 18 соединены с кронштейнами 19 иэлектромагнитами 2О.
Механизм подъема груза (фиг. 4) состоит из электродвигателя 21, пары конических ш терен 22, винта 23 и гайки 24, жестко связанной с нижним эвеном 6 стре-i лы 3, опорные катки 25 которого перемещаются в вертикальных пазах 9,
В нижней части стрелы 3 установлен пульт управления 26 с закрепленным на Hefvi грузозахватным органом 27.
Кран манипулятор работает следующим образом.
Для того чтобы привести кран ч анипуля«. тор в рабочее состояние, оператор с помо-ч шъю рукоятки на пуль/те управления 26
включает механизм уравновешивания, растормаживая звенья стрелы 3. Для поднятия груза включается электродвигатель 21, а движение от него передается на котмеские шестерни 22 и через винтовую пару {винт гайка) 23, 24 на звено 6 стрелы 3 с опорными катками 25, перемещающимися в вер- тикалшых пааак 9.
Для исключения самопроизвольного перемещения груза после Toroj как операто{; убрал руку с пулыга управления 26, начинается действие механизма уравновешивания. Прекращается поступление тока в электромагниты 20, их сердечники отходят, поворачивают тяги 16 вокруг шарниров 17 и 18, прижимая при етом диски 13 к дискам 12 3d счет растяжения пружин 15. В таком положении происходит затормаживание и предотвращается самопроизвольное перемещение груза,
Для того чтобы груз имел всзмшкность свободного перемещения, оператор должен включить электромагнит 2О при помощи рукоятки на путнлге управления 26, при этом сердечник электромагнита втягиваетс поворачивает тяги 16 вокруг шарииров 17 и 18, отодвигая наружные конусные аиски 13 от внутренних конусных дисков 12 за счет сжатия пружин 15. В таком положении катки 12. I могут свобовно вращаться на оси 14, а следовательно, и перемещаться в горизонтально направленных пазах 10.
Формула изобретения
Kpati-манипулятор, содержащий колонну, на оголовке которой установлена стрела с шарнирно сочлененными звеньями, отличающийся тем, что, с целью предотвращения раскачивания транспортируемого груза, оголовок выполнен с горизонтальным направляющим пазом, а кран снабжен расположенным на оголовке олонны механизмом уравновешивания, состоящим ни жестко связанного со звеном стрелы опорного катка, наружного и внутреннего тормсаных конусных дисков, причем последний вьшрлнен за одно целое с опорным катком, перемещающимся в горизонтальном направ ляющем пазу.
Источники информации, принятые во внимание при экспертизе:
I. Авторское свидетельство СССР NO 285653, кл. В 66 С 23/42, 1967.
Фиг.
