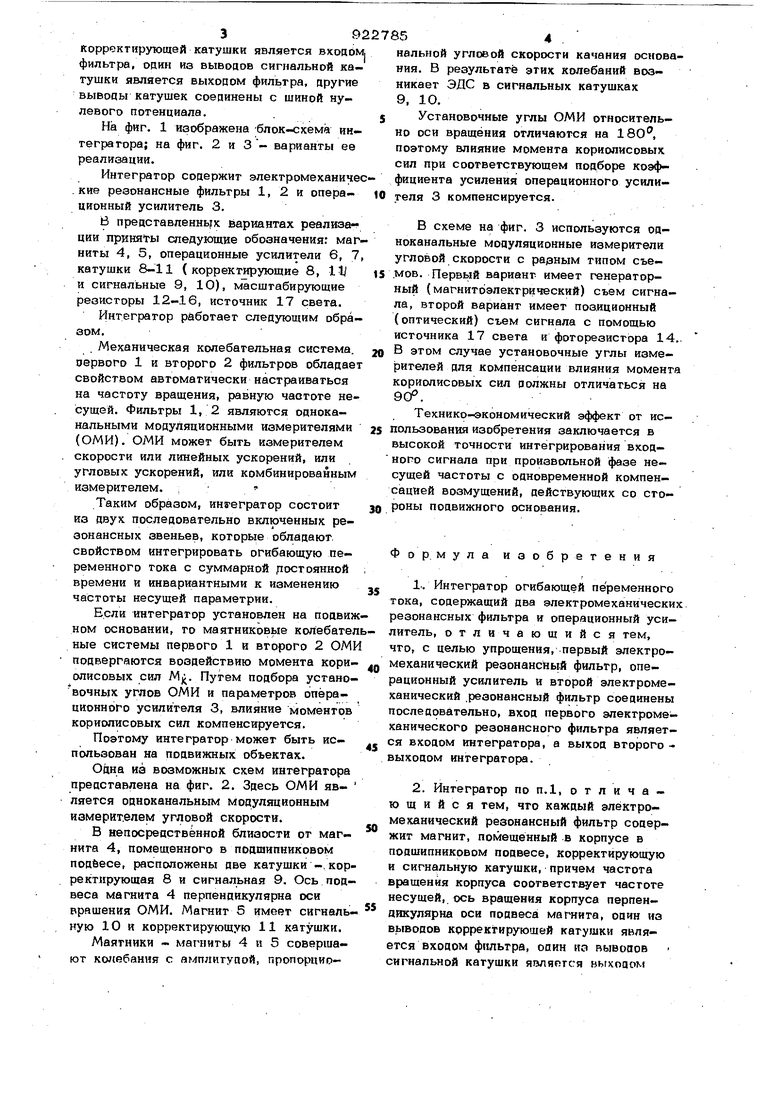
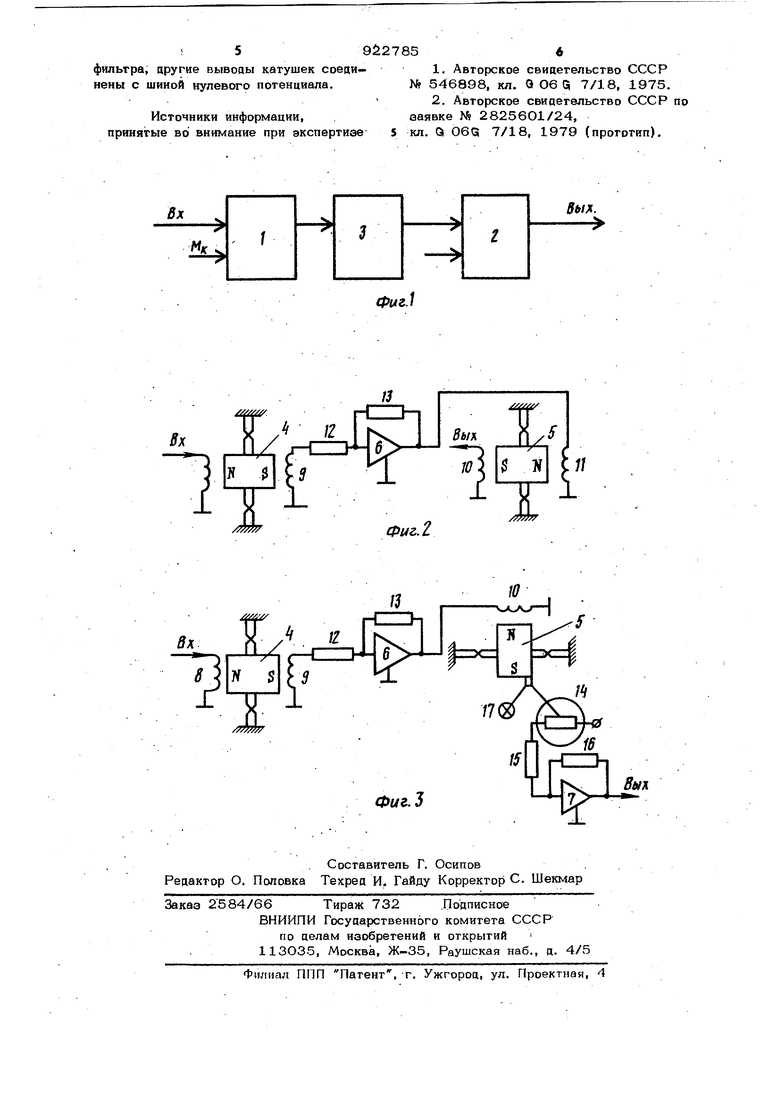
, , . ., :., Иаобрегение огносигся к автоматике и аналоговой вычислительной технике и Может применяться в системах: переменно го трка с амплитуано-фазовой модуляцией сигнала. Известен интегратор огибающей переменного гока, построенный на основе дву интегрирующих фильтров с прерывателям и авух источников опорного напряжения, йцвинутых по фазе на четверть периода несущей один относительно другого Г1 . Недостатком этого интегратора является наличие погрешностей интегрирования, обусловленных неидеальной работой «прерывателей. Наиболее близким техническим решением является интегратор огибающей переменного тока, содержащий два электромеханических резонансных фильтра, выполненных на базе одноканальных модуля ционных измерителей (ОМИ), охваченных отрицательной обратной связью через операционные усилители, причем выходы фильтров подключены к входам сумматО ра 23 . . , Недостатком известного .интегратора является сложность схемы. Цепь изобретения - упрощение. Цель достигается тем, что в интеграторе огибающей переменного тока, содержащем два электромеханических резонансных фильтра и операционный усилитель, первый электромеханический резонансный фильтр, операционный усилитель и второй электромеханический резонансный фильтр ;соёдинены последовательно, вход пергвого электромеханического резонансного фильтра является входом интегратора, а .выход второго - 5 Ь1ходом интегратора. А также тем, что каждый электромеханический резонансный фильтр содержит магнит, помещенный в корпусе в подшипниковом подвесе, корректирующую и сигнальную катушки, причем частота вращения корпуса соответствует частоте несущей, ось вращения корпуса перпендикулярна оси подвеса магнита, один из выводов корректирующей катушки является входом фильтра, одни из выводов сигнальной кагушки является выходом фильтра, другие выводы катушек соединены с шиной нулевого потенциала,. На фиг, 1 изображена блок-схема интегратора; на фиг, 2 и 3 - варианты ее реализации. Интегратор содержит электромеханиче . кие резонансные фильтры 1, 2 и операционный усилитель 3. В представленньух вариантах реализации приняты следующие обозначения: маг ниты 4, 5, операционные усилители 6, 7 катушки 8-11 (корректирующие 8, II/ и сигнальные 9, 10), масштабирующие резисторы 12-16, источник 17 света. Интегратор работает следующим образом, . Механическая колебательная система, оервого 1 и второго 2 фильтров обладает свойством автоматически настраиваться на частоту вращения, равную частоте несущей. Фильтры 1, 2 являются одноканальными модуляционными измерителями (ОМИ), ОМИ может быть измерителем скорости или линейных ускорений, или угловых ускорений, или комбинированным измерителем. Таким образом, интегратор состоит из двух последовательно включенных резонансных звеньев, которые обладают свойством интегрировать огибающую переменного тока с суммарной достоянной времени и инвариантными к изменению частоты несущей параметрии. Если интегратор установлен на подвиж ном основании, то маятниковые колебател ные системы первого 1 и второго 2 ОМИ подвергаются воздействию момента кориолисовых сил Mj. Путем подбора устано вочных углов ОМИ и параметров операционного усилителя 3, влияние моментов кориолисовых сил компенсируется. Поэтому интегратор-может быть использован на подвижных объектах. Одна на возможных схем интегратора представлена на фиг. 2, Здесь ОМИ является одноканальным модуляционным иамерит.елем угловой скорости. В непосредственной близости от магнита 4, помещенного в подшипниковом подбесе, расположены две катушки -, корректирующая 8 и сигнальная 9. Ось подвеса магнита 4 перпендикулярна оси ррашения ОМИ, Магнит 5 имеет сигнальную 10 и корректирующую 11 катущки. Маятники - магниты 4 и 5 совершают колебания с амплитудой, пропорциональной угловой скорости качания основания. В результате этих колебаний возникает ЭДС в сигнальных катушках 9, 10. Установочные углы ОМИ относительно оси вращения отличаются на 180, поэтому влияние момента кориолисовых сил при соответствующем подборе коэффициента усиления операционного усилителя 3 компенсируется. В схеме на фиг. 3 используются одноканальные модуляционные измерители угловой скорости с разным типом съе.мов. Первь1й вариант имеет генераторный (магнитоэлектрический) съем сигнала, второй вариант имеет позиционный (оптический) съем сигнала с помощью источника 17 света и фоторезистора 14.. В этом случае установочные углы измерителей для компенсации влияния момента кориолисовых сил должны отличаться на 9СР. Технико-экономический эффект от использования изобретения заключается в высокой точности интегрирования входного сигнала при произвольной фазе несущей частоты с одновременной компенсацией возмущений, действующих со стороны подвижного основания. Фор. мула изобретения 1,. Интегратор огибающей переменного тока, содержащий два электромеханических резонансных фильтра и операционный усилитель, отличающийся тем, что, с целью упрощения, первый электромеханический резонансный фильтр, операционный усилитель и второй электромеханический .резонансный фильтр соединены последовательно, вход первого электромеханического резонансного фильтра является входом интегратора, а выход второго выходом интегратора. 2. Интегратор поп.1, отличающийся тем, что каждый электромеханический резонансный фильтр содержит магнит, помещённый в корпуса в подшипниковом подвесе, корректирующую и сигнальную катушки, причем частота вращения корпуса соответствует частоте несущей, ось вращения корпуса перпендикулярна оси подвеса магнита, один из выводов корректирующей катушки является входом фильтра, один из выводов сигнальной катушки япляпгся выходом
фильтра, другие выводы катушек соединены с шиной нулевого потенциала.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 546898, кл. Q Об Q 7/18, 1975.
2.Авторское свидетельство СССР по ааявке № 28256О1/24,
кл. Q 06(3 7/18, 1979 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для интегрированияОгибАющЕй пЕРЕМЕННОгО TOKA | 1979 |
|
SU840945A1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ С ТРЕХКРАТНОЙ МОДУЛЯЦИЕЙ ПОЛЕЗНОГО СИГНАЛА НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА С ИНДУКЦИОННЫМ ИЗМЕРИТЕЛЕМ МОДУЛЯЦИИ | 2008 |
|
RU2389031C1 |
| Следящая система | 1981 |
|
SU962844A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ МОДУЛЯТОР РАЗНОСТИ ДЛИН ПЛЕЧ ИНТЕРФЕРОМЕТРА | 2003 |
|
RU2261464C1 |
| БЕЗОБОГРЕВНОЙ ТЕРМОИНВАРИАНТНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПОПЛАВКОВЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2013 |
|
RU2548377C1 |
| ДЕМПФЕР ДЛЯ ЭЛЕКТРОМЕХАНИЧЕСКИХ УСТРОЙСТВ ПЕРЕМЕННОГО ТОКА | 1998 |
|
RU2193122C2 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2010 |
|
RU2485444C2 |
| Устройство для определения технического состояния подшипников качения и скольжения | 2017 |
|
RU2686861C1 |
| СПОСОБ ПОДСТРОЙКИ РЕЗОНАНСНОЙ ЧАСТОТЫ ПОДВЕСА ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА С ГЛУБОКОЙ ОБРАТНОЙ СВЯЗЬЮ ПО СКОРОСТИ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОЙ МАССЫ ПО ОСИ ВТОРИЧНЫХ КОЛЕБАНИЙ И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2316731C1 |
| ИЗМЕРИТЕЛЬ ПРОСТРАНСТВЕННЫХ ВИБРАЦИЙ | 2010 |
|
RU2454644C1 |
