(5) СЛЕДЯЩАЯ СИСТЕМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ЗАЗОРОМ В КИНЕМАТИЧЕСКОЙ ПЕРЕДАЧЕ (ВАРИАНТЫ) | 2022 |
|
RU2783736C1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| Система автоматического сопровождения телескопа | 1989 |
|
SU1725181A1 |
| Устройство для ограничения динамических нагрузок копающих механизмов экскаватора | 1990 |
|
SU1740571A1 |
| Частотно-регулируемый электропривод | 1982 |
|
SU1023606A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2000 |
|
RU2189105C2 |
1
Изобретение относится к следящим системам и может быть использовано, в частности для регулирования скороети в подъемно-транспортных промышленных установках.
Известна следящая система, содержащая последовательно соединенные задатчик, первый элемент сравнения, первое пропорциональное звено, сумматор, электродвигатель и редуктор, выход которого через датчик регулируемой координаты соединен с вторым входом первого элемента сравнения, первый вход которого через последовательно соединенное нелинейное корректирующее звено и первый функциональный преобразователь соединен с входом второгр функционального преобразователя и первым входом второго элемента сравнения, второй вход ко- торого через датчик скорости подключен к выходу электродвигателя, выход через второе пропорциональное звено соединен с вторым входом сумматора,
первый вход третьего элемента сравнения соединен с выходом второго функционального преобразователя, второй вход через датчик тока подключен к второму выходу электродвигателя, а выход через третье пропорциональное звено подключен к третьему входу сумматора ГП.
Известна также следящая система, содержащая последовательно соединен10ные элемент задания, первый и второй нелинейный элементы с ограничением, первый и второй интеграторы, первый, второй и третий регуляторы, усилитель мощности и исполнительный двигатель,
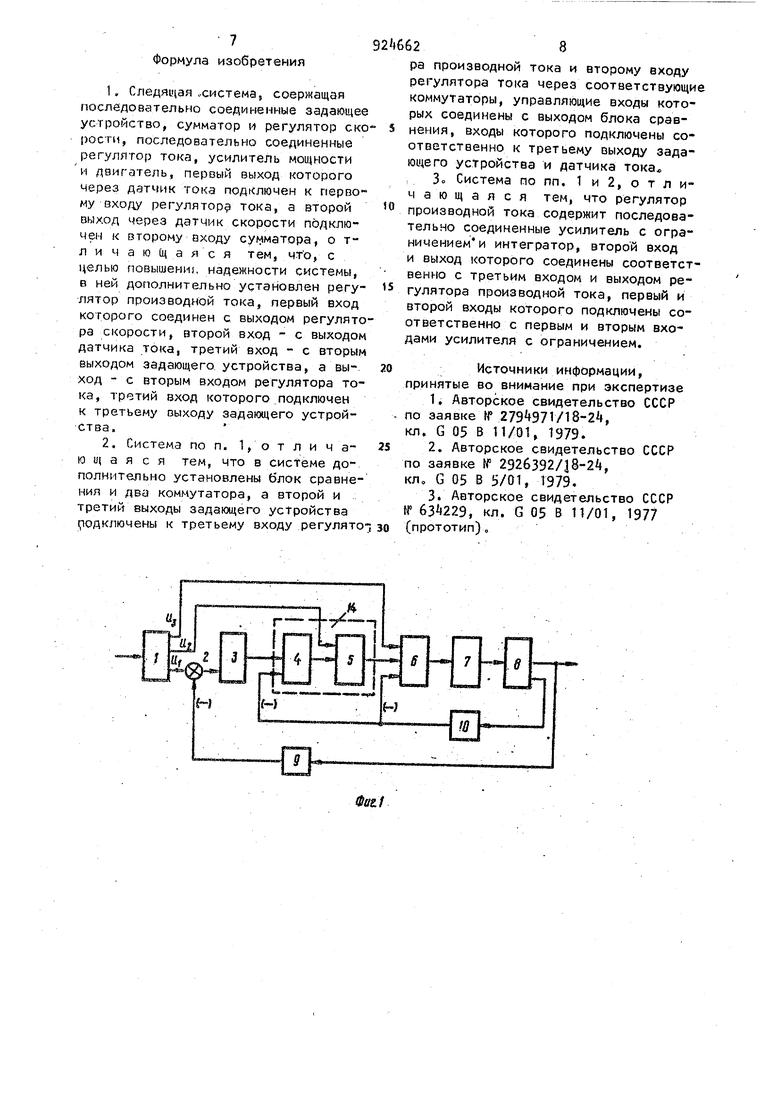
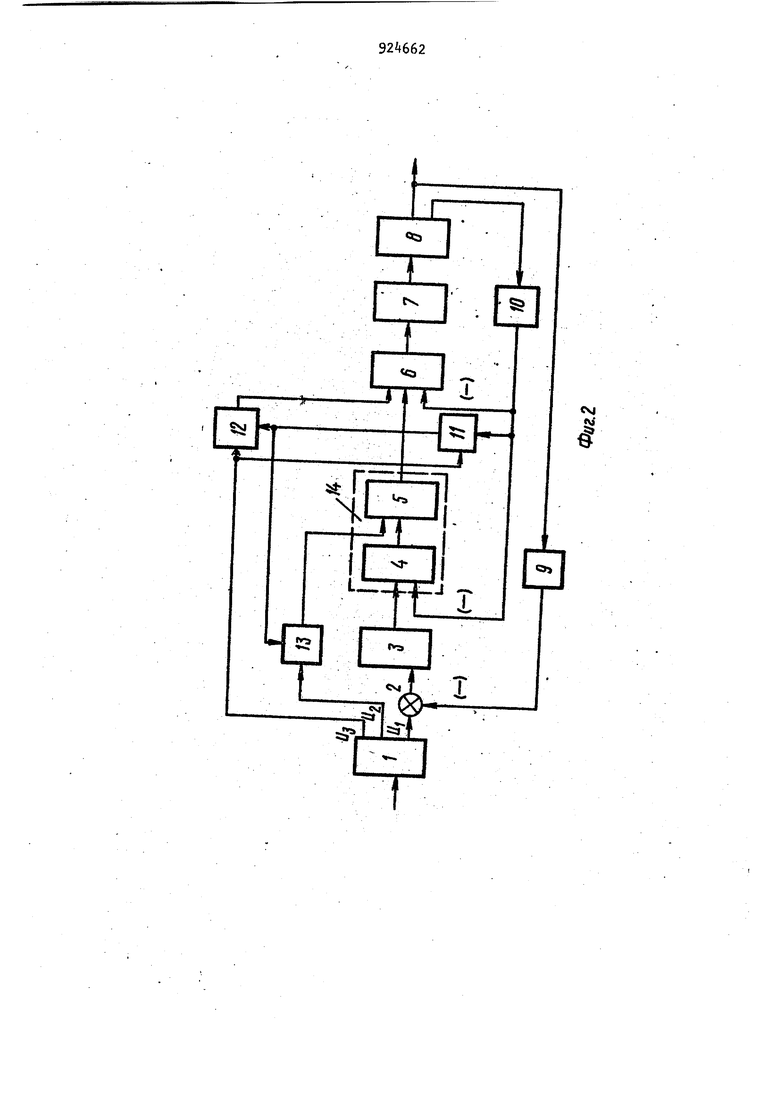
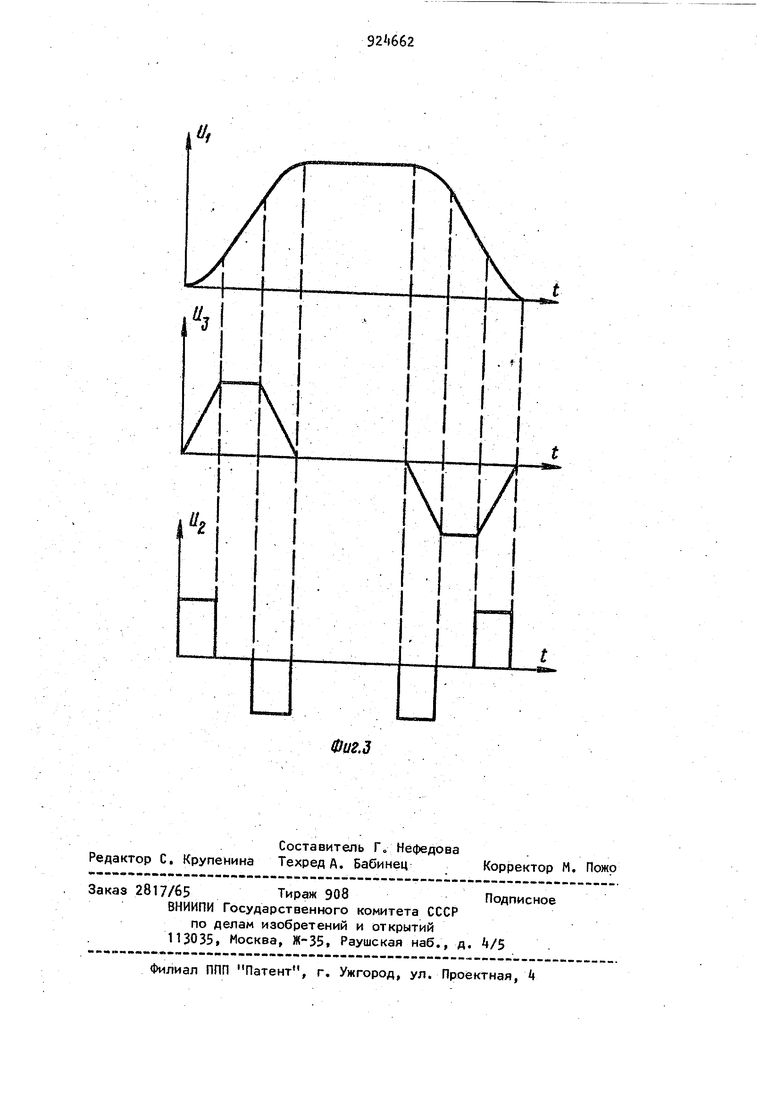
5 выход которого через датчики регулируемой координаты, скорости и тока подключен к вторым входам соответственно, первого, второго и третьего регулятора, выход первого интеграто20ра подключен к второму входу второго нелинейного элемента с ограничением и через первый усилитель к третьему входу первого регулятора. четвертый вход которого через второй усилитель подключен к вьгходу второго нелинейного элемента с ограничением, выход второго интегратбра соединен с вторым входом первого нелинейного элемента с orpjHHMeHMeM. Причем элемент .задания, первый и второй нелинейные элементы с ограничением, первый и второй интеграторы и первый и второй усилители функционально входят в состав задающего устройства следящей системы L23. ИзЕ5естные системы обладают значительнымидинамическими ошибками потому, что в них каждый из регуляторов формирует воздействие на последу кхций регулятор из разности между заданным и действительным значениями выходной координаты внешнего контура регулирования. , Наиболее близкой по технической сущности к предлагаемой является сле дящая система, содержащая последовательно соединенные задатчик, первый сумматор, регулятор скорости, второй .сумматор, регулятор тока, тиристорны преобразователь иэлектродвигатель, первый выход которого через датчик тока соединен с вторым входом второг сумматора, а через датчик производно тока - с третьим входом второго сумматора и вторым входом первого сумматора, третий и четвертый входы которого подключены к второму выходу электродвигателя через соответственно датчик скорости и датчик ускоре.ния 33. Основным недостатком известной системы является необходимость применения дифференцирующих звеньев для получения сигналов ускорения и производной тока, что cyu.iecTBeHHo снижает надежность системы и усложняет настройку ее функциональных блоков. Цель изобретения - повышение наде ности системы. Поставленная цель достигается тем что в системе, содержащей последовательно соединенные задающее устройство, сумматор и регулятор скорости, последовательно соединенные регулято тока, усилитель мощности и двигатель первый выход которого через датчик тока подключен к первому входу регулятора тока,а второй выход через датчик скорости подключен к второму ВХОДУ сумматора, дополнительно установлен регулятор производной тока. первый вход которого соединен с выходом регулятора скорости, второй вход - с выходом датчика тока, третий вход - с вторым выходом задающб го устройства, а выход - с вторым входом регулятора тока, третий вход которого подключен к третьему выходу задащего устройства, В системе дополнительно установлены блок сравнения и два коммутатоa, а второй и третий выходы задащего устройства подключены к третьму входу регулятора производной тоа и второму входу регулятора тока ерез соответствующие коммутаторы, правляющие входы которых соединены выходом блока сравнения, входы коорого подключены к третьему выходу адаюсцего устройства и датчика тока. Регулятор производной тока содержит последовательно соединенные усилитель с ограничением и интегратор, второй вход и выход которого соединены соответственно с третьим входом и выходом регулятора производной тока, первый и второй входы которого подключены соответственно с первым и вторым входами усилителя с ограничением. На фиг, 1 представлена структурная схема системы, согласно п. 1 формулы; на фиг. 2 - то же, согласно п. 2; на фиг. 3 эпюры напряжений на выходах задающего устройства. Схема системы содержит задающее устройство 1, сумматор 2, регулятор 3 скорости, усилитель 4 с ограничением, интегратор 5 регулятор 6 тока, усилитель 7 мощности, двигатель 8, датчик 9 скорости, датчик 10 тока, блок 11 сравнения, коммутаторы 12 и 13, регулятор И производной тока, И, И| и Hj - напряжение на первом, втором и третьем выходах задающего устройства, В предлагаемой системе может быть применено задающее устройство, входящее в состав известной следящей системы 21 и содержащее элемент задания, первый и второй нелинейные элементы с ограничением, первый и второй интеграторы и первый и второй усилители. Система работает следующим образом.; При формировании на выходе задающего элемента, входящего в состав задающего устройства 1, ступенчато5го сигнала, пропорционал.ьного максимальной заданной скорости, на выходах задающего устройства 1 формируются напряжения И, И« И и, изменяющиеся во времени по законам, изоб раженным на фиг, Зо На первом выходе формируется напряжение Иу, пропор циональное заданной скорости, на вто ром - И, пропорциональное ограничению второй производной скорости, а на третьем - И, пропорциональное ог раничению ускорения. Выходное напряжение с первого выхода задающего устройства 1 подается на первый вход сумматора 2, на второй вход которого подается напряжение с выхода датчика 9 скорости Сигнал рассогласования, сформированный в сумматоре 2, подает ся на вход регулятора 3 скорости. Выходной сигнал регулятора 3 скорости подаётся на первый вход усилителя 4 с ограничением, на второй вход которого подается напряжение с выхода датчика 10 тока Выходной сигнал усилителя 4 с ограничением подается на первый вход интегратора 5, на вто рой вход которого подается напряжение 1 с второго входа задающего устройства 1. Выходное напряжение датчика 10 то ка поступает на первый вход регулятора 6 тока, на второй вход которого подается напряжение с выхода интегра тора 5 а на третий вход - напряжение И с третьего выхода задающего устройства 1. Выходной сигнал регуля тора 6 тока усиливается по мощности в усилителе 7 мощности и поступает на вход двигателя 8, вал которого на чинает отрабатывать поступающий на вход двигателя 8 сигнал управления. Таким образом, в предлагаемой системе на вход каждого регулятора подается разность заданного и текущего значений регулируемой координаты данного контура регулирования, а также выходной сигнал предыдущего регулятора, зависящий от точности воспроизведения заданного закона изменения регулируемой координаты предыдущего контура регулирования о Наличие в системе регулятора Vt производной тока приводит к тому, что при подаче задающих воздействий. . с выходов задающего устройства 1 на выходе интегратора 5 появляется напряжение одинаковой полярности с напряжением Из , подаваемым на третий 62 ВХОД регулятора 6 тока с выхода задающего устройства 1. В результате суммарное входное напряжение регулятора 6 тока оказывается больше требуемого. Следовательно, текущее значение тока двигателя 8 превышает заданное и на выходе усилителя Ц с ограничением появляется напряжение отрицательной полярности по отношению к напряжению И2. заданного значения ограничения второй производной скорости и дальнейшее увеличение напряжения на выходе интегратора 5 прекращается, ЕСЛИ при этом текущее и заданное значение скорости не равны, то на первый вход усилителя с ограничением будет поступать напряжение полярности, увеличивающей (или уменьшающей) выходное напряжение интеграто ра 5. Таким образом, предлагаемая систе|ма при соответствующем выборе пара|метров регуляторов 3, И и 6 может |работать в режиме, при котором изме-нение текущей скорости будет опережать изменение задания, что дает возможность повысить быстродействие системы и точность воспроизведения Заданной диаграммы изменения скорости. Блок 11 сравнения сравнивает напряжения на третьем выходе задающего устройства 1 и на выходе датчика 10 тока и формирует команды коммутаторам 12 и 13 на отключение напряжений И от входов регуляторов 1 и 6 в том случае, если при активной нагрузке напряжения на его входах окажутся одинаковой полярности. Этим исключается возможность появления больших токов в моменты включения и выключения системы. При реактивной нагрузке применение коммутаторов не требуется. Указанные отличительные особенное- и позволяют повысить быстродействие точность воспроизведения заданной иаграммы изменения скорости при знаопеременных нагрузках на валу двигаеля без применения дифференцирующих веньев, используя серийно выпускамую аппаратуру. Кроме того, достижеие трапецеидальной диаграммы изменеия ускорения позволяет получить опимальные по динамическим нагрузкам а валу двигателя режимы работы сисемы. Указанные обстоятельства позвояют на порядок повысить надежность и олговечность электромеханического обоудования, входящего в состав системы. Формула изобретения 1,Следящая „система, соержащая последовательно соединенные задающее устройство, сумматор м регулятор ско рости, последовательно соединенные регулятор тока, усилитель мощности и двигатель, первый выход которого Через датчик тока под1 лючен к первому входу регулятору тока, а второй выход через датчик скорости подключен к второму входу сумматора, о тл и ч а ю ц а я с я тем, что, с целью повышени, надежности системы, в ней дополнительно установлен регулятор производной тока, первый вход которого соединен с выходом регулято ра скорости, второй вход - с выходом датчика тока, третий вход - с вторым выходом задающего устройства, а выход - с вторым входом регулятора тока, третий вход которого подключен к третьему выходу задаиэщего устройства, 2.Система по п. 1, о т л и ч аю щ а я с я тем, что в cиcteмe дополнительно установлены блок сравнения и два коммутатора, а второй и третий выходы задающего устройства подключены к третьему входу регулято 2 ра производной тока и второму входу регулятора тока через соответствующие коммутаторы, управляющие входы которых соединены с выходом блока сравнения, входы которого подключены соответственно к третьему выходу задающего устройства и датчика тока, 3 Система по пп. 1 и 2, о т л ичающаяся тем, что регулятор производной тока содержит последовательно соединенные усилитель с ограничением и интегратор, второй вход и выход которого соединены соответственно с третьим входом и выходом регулятора производной тока, первый и второй входы которого подключены соответственно с первым и вторым входами усилителя с ограничением. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР по заявке tf 279 971/18-2, кл. G 05 В 11/01, 1979. 2.Авторское свидетельство СССР по заявке № 2926392/38-24, кл G 05 В 5/01, 1979. 3.Авторское свидетельство СССР If 634229, кл. G 05 В И/01, 1977 (прототип).
cvj
Фцг.з
