Изобретение относится к робототехнике и может быть использовано дл создания роботов, осуществляющих сбо ку деталей типа вал-отверстие. Известно устройство для управлени сборочным роботом, содержащее сумматор, шаговый двигатель, коммутатор, редуктор и дешифратор, которое не обеспечивает сборку деталей типа вал отверстие til Наиболее близким по технической сущности к предлагаемому является устройство, содержшцее пульт управле ния, первый элемент ИЛИ, первый реверсивный счетчик и по каждой коорди нате X, Y, Z исполнительный механизм первый и второй элементы И, выходы которых подключены ко входу коммутатора, выходом соединенного со входом шагового двигателя, причем выходы . первого и второго элементов И координат X и У подключены ко входам первого элемента ИЛИ, а выход генератора соединен с первыми входами первого и второго элементов И координат X ,. У Z Г21. Недостатком известного устройства является также невозможность применения его для сборки деталей типа валотверстие. Цель изобретения - расширение функциональных возможностей устройства. Цель достигается тем, что устройство содержит элемент НЕ, второй элемент ИЛИ, второй реверсивный счетчик, элемент задержки, с третьего по двенадцатый элементы И, пять триггеров, два дешифратора и по каждой координате X, Y, 2 датчик момента, через который вал шагового двигателя связан с исполнительным механизмом, выход первого элемента ИЛИ соединен с первыми входами третьего и четвертого элементов И, выходы которых подключены соответственно ко входу и выходу первого триггера, соединенного выходом через последовательно подключенные первый реверсивный счетчик, первый дешифратор и пятый элемент И со входом второго триггера, пер-.ый выход которого подключен к первым входам шестого и седьмого элементов И, а второй выход - к первым входам восьмого и девятого элементов И, выходы которых соединены соответственно с выходом шестого элемента И и вторыми входами третьего элемента И и первого реверсивного счетчика, и с выходом седьмого элемента И, и втогнлм входом четвертого элемента И, и третьим входом. первого реверсивного счетчика, выход второго элемента ИЛИ подключен через элемент задержки ко второму входу пятого элемента И и непосредственно ко входу третьего триггера, первый выход которого подсоединен ко вторым входам шестого и девятого элементов И, третьему входу пятого элемента И, а.также вторым входом вторых
элементов И координат X и Y , выход первого дешифратора соединен с первым входом четвёртого триггера, подключенного выходом к первому входу десятого элемента И, второй вход которого соединен с первым выходом пулта управления, а выход - через элемент НЕ с первыми входами одиннадцатого и двенадцатого элементов И и непосредственно со вторым входом первого элемента И координаты Z, первы выход пятого триггера подключен ко второму входу одиннадцатого элемента И, выходом соединенного с третьими входами первого и второго элементов И координаты X, а второй выхой пятого триггера подключен ко второму входу двенадцатого элемента И, выходом соединенного с третьими входами первго и второго элементов и координаты Y, второй выход пульта управления подключен к первому и второму входам второго ревеЕ сивного счетчика, выход которого через второй дешифратор соединен со входом пульта управления, третий выход которого подключен ко второму входу второго элемента И координаты Z , выход первого элемента И координаты Z соединен .с третьим и четвертым входами второго реверсивного счетчика, выходы датчиков момента координат X и Y подключены ко входам второго элемента ИЛИ, а выход датчика момента координаты Z - ко второму входу четвертого триггера и входу пятого триггера.
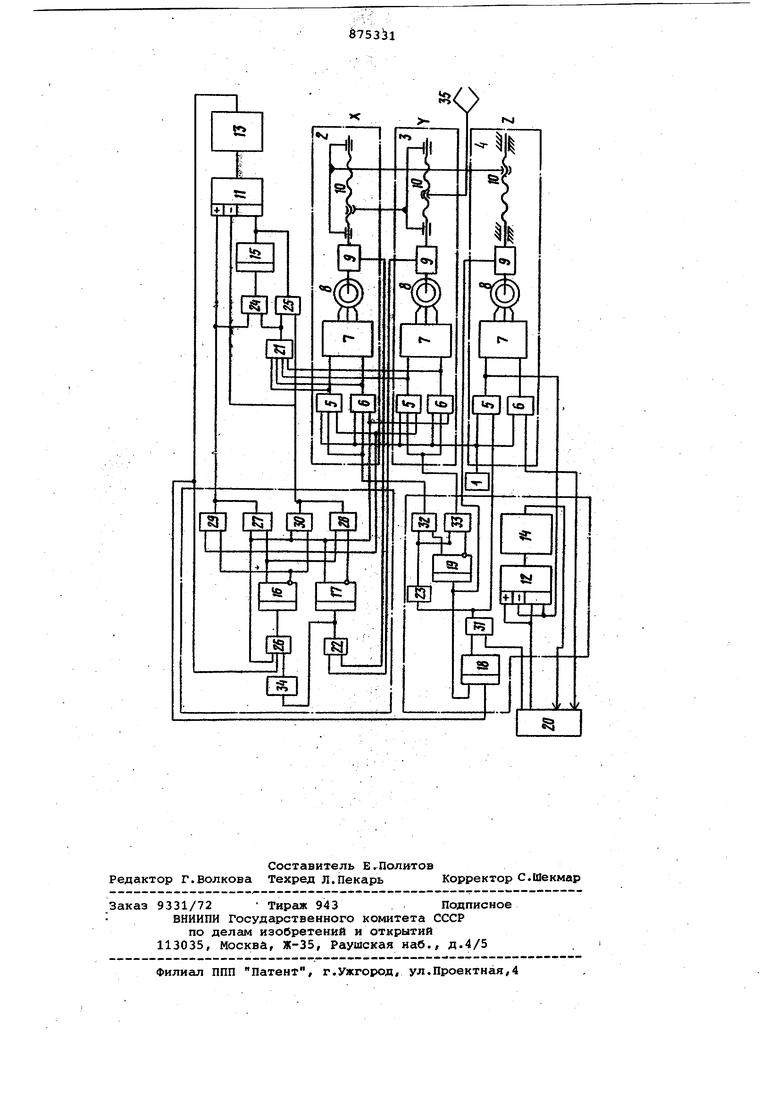
На чертеже представлена функциональная схема предлагаемого устройства.
Устройство содержит генератор 1, координаты X ,Y ,Z ,2, 3, 4, COOT-, ветственно, первые элементы И 5, вторые элементы и б, коммутаторы 7, шаговый двигатель 8, датчики 9 момента исполнительные механизмы 10, первый и второй реверсивные счетчики 11 и 12 соответственно, первый и второй дешифраторы 13 и 14 соответственно, первый, второй, третий, четвертый и пятый триггеры 15,16,17,18 и 19 соответственно, пульт 20 управления, первый и второй элементы ИЛИ 21 и 22 соответственно, элемент НЕ 23, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый и двенадцатый элементы И 24,25,26,27,28,29,30,31,32 и 33 соответственно, элемент 34 задержки, схват 35 исполнительного органа робота .
Устройство работает следующим образом.
По первому выходу пульта 20 управления перемещения Z на реверсивный счетчик 12 подается число импульсов, соответствующее величине гарантированного для сборки перемещения по Z, после чего деталь (вал), расположенная в схвате 35 робота, свободно перемещается в отверстия под действием силы тяжести. При подаче сигнала по второму выходу пульта 20 на прямом выходе десятого элемента И 3, появляется сигнал, поступающий на второй вход первого элемента И -5 координаты Z4. В результате импульсы с генератора 1 проходя через элемент И 5, коммутатор 7 на шаговый двигатель8 перемещающий подвижную деталь, -например вал, расположенную в схвате 35 робота вниз по оси Z. При контакте деталей, что обусловлено несовпадением одной или двух горизонтальных осей, на выходе датчика 9 момента координаты Z 4 формируется сигнал. Так как дальнейшее перемещение невозможно ввиду контакта деталей, то происходит закручивание торсиона датчика 9 момента.
.Положим, что контакт деталей произошел в правой полуплоскости, расположения осей X , Y. Сигнал с выхода датчика 9 момента координаты Z 4 поступает на вход четвертого триггера 18, изменяя его состояние, и через десятый элемент И 31, прекращая подачу импульсов с генератора 1 на вход привода координаты Z 4. В результате на оба входа одиннгодцатого элемента И 32 подаются сигналы и он дает разрешение на работу привода координаты X 2.
Импульсы с генератора 1 через первый элемент И 5, так как второй и третий триггеры 16 и 17, находятся в нулевом состоянии подаются на коммутатор 7, приводя в движение шаговый двигатель 8, который через механизм 10 перемещает схват 35 робота с деталью (валом) в определенном направлении, например вперед. Триггер 17 определяет направление движения приводов: его нулевому состоянию соответствует движение йперед, а единичному - назад. Одновременно с этим импульсы через элемент И 24, так как есть разрешение с элемента И 29, и триггер 15 со счетным входом с коэффициентом деления два, поступают на с 1етный вход счетчика 11. Так как перемещение вправо невозможно ввиду контакта деталей, то происходит закручивание торсиона датчика 9 момента координаты X, который фиксирует останов, формируя при этом сигйал на выходе. Этот сигнал через второй элемент ИЛИ 22 изменяет состояние триггера 17 направления. В результате импульсы с генератора 1 подаются через элемент И 6 на шину назад коммутатора 7, и начинается движение н зад. На выходе дешифратора 13 сигнал имеет место только при числе в счет чике 11 равном нулю. Так как на сче чик 11 подавался каждый второй импульс/ то после срабатывания датчика 9 момента после первого импульса число в счетчике 11 будет равно нулю Сигнал с выхода дешифратора 13 подается на вход пятого элемента И 26 на другие входы которого подаются сигналы с выхода элемента 34 задерж ки и триггера 17, что приводит к ср батыванию триггера 16 управления сч том счетчика 11. При движении назад импульсы с генератора 1 поступанл й счетчик 11 через элемент И 24,так ка имеется сигнал на выходе элемента И 27, с коэффициентом деления два. Далее, при движении назад происходит счет каждого второго импульса, При полном перемещении и контакте сопрягаемых деталей датчик 9 момента координаты X выдает сигнал. В результате перемещения по оси X число в счетчике 11 равно половине от-, клонения осей сопрягаемых деталей. Действительно, полное перемещение по движной детали из одного крайнего по ложения в другое равно двойному отклонению осей(а в счетчик 11 подавался каждый второй импульс. После останова; по сигналу с датчика 9 момента координаты X через элемент ИЛИ срабатывает триггер 17 направлений. Происходит реверс двигателя 8, так как импульсы с генератора 1 на коммутатор 7 подаются через элемент И 5 Счетчик 11 начинает при этом работат в режиме вычитания, так как сигнйл на него подается с прямого.выхода триггера 16 и инверсного вьахода триг гера 17 через элемент И 30. Причем происходит вычитание каждого импульса, поступающего на вход счетчика 11 уже через элемент И 6 координаты Z. Таким образом, при перемещении на половину пути между крайними точками контакта деталей, т.е. совмещении осей у деталей, число в счетчике 11 будет равно нулю, и появится сигнал на выходе дешифратора 13, дакяций команду на работу привода координаты Z. Рассмотрим второй возможный случйй взаимного расположения деталей после опускания ваша приводом по оси 2. Вал располагается в левой полуплоскости. При подаче сигнала на вход координаты X 2 1шпульсы с генератора 1 через элемент И 5 координаты X (схема в исходном состоя-, нии) подаются на вход коммутатора 7, в результате двигатель 8 перемещает схват 35 вправо. Счетчик 11 работаjST на сложение, так как управлязющий ригнал на шину сложения подается с инверсных выходов триггеров 16 и 17 через элемент и 29. На счетный вход счетчика 11 с генератора 1 пода- ется каждый второй импульс. При полном перемещении вправо и контакте деталей появится сигнал на выходе датчика момента 9, изменяющий состо.яние триггера 17. В результате произойдет реверс двигателя 8, так как импульсы с генератора 1 на вход КОМмутатора 7 подаются теперь через элемент И 6 координаты Y. -Число в счетчике 11 равно половине пройденного пути. Далее схема работает описанным выше образом. Из счетчика 11 происходит вычитание каждого импульса. ПЬсле обнуления счетчика 11, что указывает на совмещение осей Y, на выходе дешифратора 13 формируется сигнал, дающий команду на работу привода координаты Y. Далее дается перемещение привода координаты 2. При появлении сигнала с дешифратора 13 срабатывает триггер 18, в результате на его прямом выходе появляется сигнал, и элемент И 31 открывает элемент И 5 координаты 4, пропуская тем самым импульсы с генератора 1 на двигатель 8 координаты. Происходит перемещение детали (вала) вниз до контакта фасок coпpягae влx деталей. При контакте деталей срабатывает датчик 9 момента с координаты 7.. В результате срабатывают триггер 18,отключающий через элементы 31 и 5 координаты Z, выход генеЕ атора 1 от входа координаты Z 4 и триггер 19,включающий через элементы И 33, И 5 координаты Z 3 привод оси Y. После совмещения оси X на выходе дешифратора 13 формируется сигнал, изменяющий состояние триггера 18 и тем самым через элементы и 31,и 5,подключая выход генератора 1 к входу двигателя 8 координаты Z. При перемещении координаты Z 4 детали (вала) расположенной в схвате 35, счетчик 12 работает в режиме вычитания. При перемещении на величину, гарантированную для сборки (внесенное число импульсов в счетчик 12) на выходе дешифратора 14 формируется сигнал, указывающий на окончание процесса сборки (конец), и разжатие схвата 35, после чего сборка происходит в результате перемещения вала в отверютии под действием силы тяжести. Применение предлагаемого устройства позволит осуществлять сборку деталей типа вал-отверстие в результате контроля переменного и не связанного с точкой отсчета системы координат робота перемещения, фиксации, останова при контакте сопрягаемых деталей независимо от величины координатного перемещения и соответствующим управлением этими операциями Формула изобретения Устройство для управления сборочным роботом, содержащее пульт управления, первый элемент ИЛИ, первый реверсивный счетчик и по каждой координате X,Y, Z исполнительный механизм, первый и второй элементы И, вы ходы которых подключены ко входу ком мутатора, выходом соединенного со входом шагового двигателя, причем вы ходы первого и второго элементов И координат X и У подключены ко входам первогоэлемента ИЛИ, а выход генератора соединен с первыми входами первого и второго элементов И коорди нат X,Y,Z,отличающееся тем, что, с целью расширения функциональных возможностей устройства, он содержит элемент НЕ, второй элемент ИЛИт второй реверсивный счетчик, эле мент задержки, с третьего по двенадц тый элементы И, пять триггеров, два дешифратора и по .каждой координате X Y,Z датчик момента, через который ва шагового двигателя связан с исполнительным механизмом, выход.первого элемента ИЛИ соединен с первыми входами третьего и четвертого элементов И, выходы которых подключены соответ ственно ко входу и выходу первого триггера, соединенного выходом через последовательно подключенные первый реверсивный счетчик, перёый дешифратор- и пятый элемент И со входом второго триггера, первый выход которого подключен к первым входам шестого и седьмогоэлементов И, а второй выход к первым входам восьмого и девятого элементов И, выходы которых соединены соответственно с выходом шес того элемента И и вторыми входами третьего элемента И, и первого ревер сивного счетчика, и с выходом седьмого элемента И, и вторым входом четвертого элемента И, и третьим вхо дом первого реверсивного счетчика, выход второго элемента ИЛИ подключен через элемент задержки ко-второму входу пятого элемента И и непосредственно ко входу третьего триггера, первый выход которого подсоединен ко вторым входам шестого и девятого элементов И, третьему входу пятого элемента И, а также вторым входом вторых элементов И координат X и Y, выход первого дешифратора соединен с первым входом четвертого триггера, подключенного выходом к первому входу десятого элемента И, второй вход которого соединен с первым выходом пульта управления, а выход через элемент НЕ с первыми входами одиннадцатого и двенадцатого элементов И и непосредственно со вторым входом первого элемента И координаты Z, первый выход пятого триггера подключен ко второму входу одиннадцатого элемента И, выходом соединенного с третьими входами первого и второго элементов И координаты X, а второй выход пятого триггера подключен ко второму входу двенадцатого элемента И, выходом соединенного с третьими входами первого и второго элементов И координаты Y, второй выход пульта управления подключен к первому и второму входам второго реверсивного счетчика, выход которого через второй дешифратор соединен со входом пульта управления, третий выход которого подключен ко второму входу второго элемента И координаты Z выход первого элемента И координаты Z соединен с третьим и четвёртым входами второго реверсивного счетчика, выходы датчиков момента координат X и Y подключены ко входам второго элемента ИЛИ, а выход датчика момента координаты Z - ко второму входу четвертого триггера и входу пятого триггера. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 228761, кл.С 05 В 19/40, 1967. 2.Авторское свидетельство СССР № 444162, кл.С 05 В 19/40, 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство управления укладчиком листового стекла | 1988 |
|
SU1551664A1 |
| Устройство для управления сборочным роботом | 1981 |
|
SU989534A1 |
| Устройство для управления сборочным роботом | 1980 |
|
SU1075233A1 |
| Устройство для управления адаптивным роботом | 1985 |
|
SU1305028A1 |
| Устройство для программного управления позиционного типа | 1983 |
|
SU1158976A1 |
| Система управления гибким производственным комплексом | 1987 |
|
SU1513417A1 |
| Устройство для программного управления захватом автооператора | 1982 |
|
SU1233103A1 |
| Устройство для управления адаптивным роботом | 1981 |
|
SU1004972A1 |
| Устройство для управления электроприводом робота | 1982 |
|
SU1092462A1 |