Изобретение относится к электротехнике и может быть использовано в устройствах автоматизации сборочных операций, например, для перемещения рабочего органа установки, в частности светового проектора, указывающего место установки элементов монтажа.
Цель изобретения - расширение эксплуатационных возможностей.
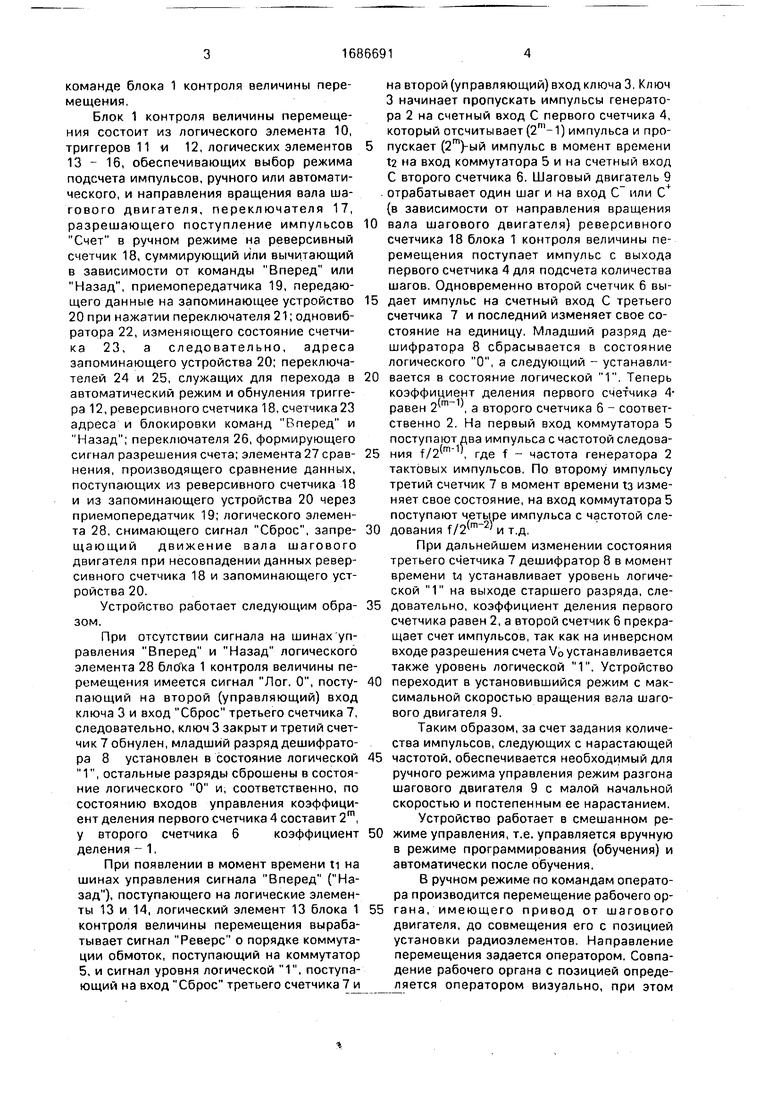
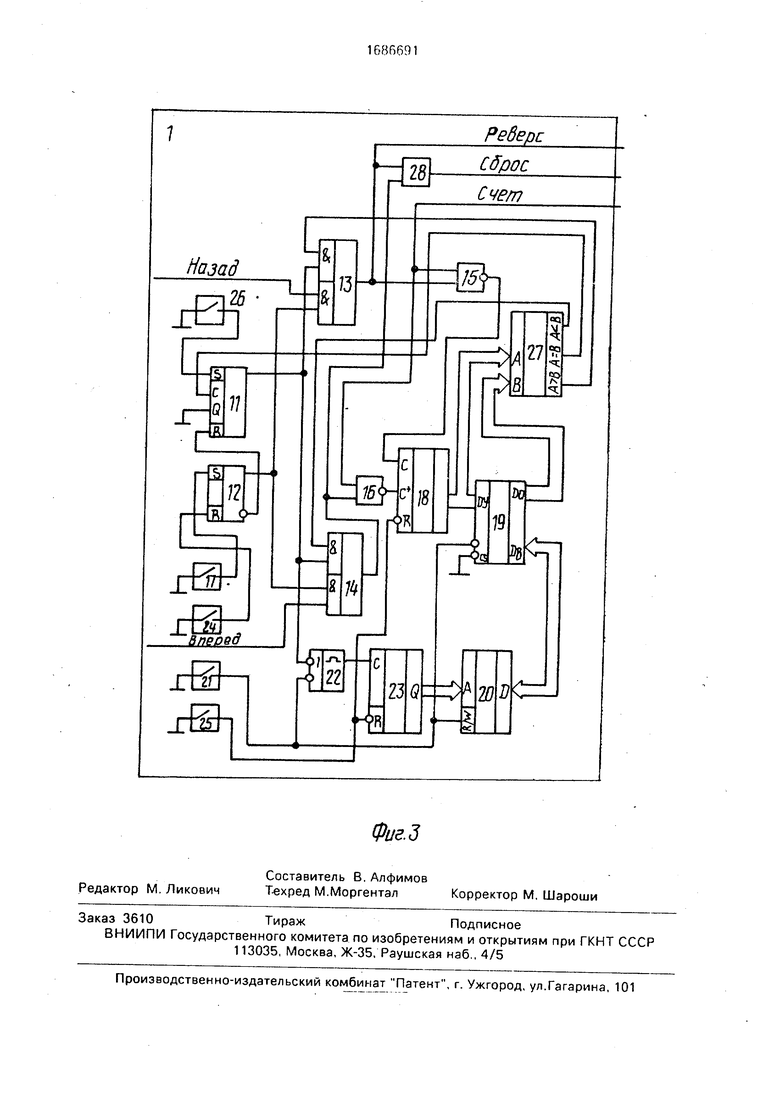
На фиг. 1 представлена схема устройства для управления шаговым двигателем; на фиг. 2 - диаграммы сигналов на основных элементах; на фиг. 3 - структурная схема блока контроля величины перемещения.
Устройство для управления шаговым двигателем состоит из блока 1 контроля величины перемещения, генератора 2 тактовых импульсов, выход которого подключен к первому входу ключа 3, выход последнего подключен к счетному входу С первого счетчика 4, выход которого подключен к входу коммутатора 5, выполненного по одной из известных схем, например по схеме четырехтактного реверсивного распределителя импульсов, и одновременно к входу Счет блока 1 и к счетному входу С второго счетчика 6, выход которого подключен к счетному входу С третьего счетчика 7, вход R Сброс последнего объединен с вторым (управляющим) входом ключа 3 и подключен к выходу блока 1 контроля величины перемещения, выходы третьего счетчика 7 через дешифратор 8 подключены к входам управления первого и второго счетчиков. Коммутатор 5 соединен с обмотками двигателя 9.
Коэффициент пересчета импульсов определяется состоянием входов управления VL. Vm первого счетчика 4, а второй счетчик 6, аналогичный счетчику 4, предназначен для подсчета количества импульсов в пачке и выдачи импульсов на третий счетчик 7, управляющий через дешифратор 8 состоянием информационных входов первого счетчика 4 и второго счетчика 6. Ключ 3 служит для прекращения прохождения импульсов при остановке двигателя 9 шагового по
Qs
00
о о ю
команде блока 1 контроля величины перемещения.
Блок 1 контроля величины перемещения состоит из логического элемента 10, триггеров 11 vi 12, логических элементов 13 - 16, обеспечивающих выбор режима подсчета импульсов, ручного или автоматического, и направления вращения вала шагового двигателя, переключателя 17, разрешающего поступление импульсов Счет в ручном режиме на реверсивный счетчик 18, суммирующий или вычитающий в зависимости от команды Вперед или Назад, приемопередатчика 19, передающего данные на запоминающее устройство 20 при нажатии переключателя 21; одновиб- ратора 22, изменяющего состояние счетчика 23, а следовательно, адреса запоминающего устройства 20; переключателей 24 и 25, служащих для перехода в автоматический режим и обнуления триггера 12, реверсивного счетчика 18, счетчика 23 адреса и блокировки команд Вперед и Назад ; переключателя 26, формирующего сигнал разрешения счета; элемента 27 сравнения, производящего сравнение данных, поступающих из реверсивного счетчика 18 и из запоминающего устройства 20 через приемопередатчик 19; логического элемента 28, снимающего сигнал Сброс, запрещающий движение вала шагового двигателя при несовпадении данных реверсивного счетчика 18 и запоминающего устройства 20.
Устройство работает следующим образом.
При отсутствии сигнала на шинах управления Вперед и Назад логического элемента 28 бло Ха 1 контроля величины перемещения имеется сигнал Лог. О, поступающий на второй (управляющий) вход ключа 3 и вход Сброс третьего счетчика 7, следовательно, ключ 3 закрыт и третий счетчик 7 обнулен, младший разряд дешифратора 8 установлен в состояние логической 1, остальные разряды сброшены в состояние логического О и, соответственно, по состоянию входов управления коэффициент деления первого счетчика 4 составит 2т, у второго счетчика 6 коэффициент деления - 1.
При появлении в момент времени ti на шинах управления сигнала Вперед (Назад), поступающего на логические элементы 13 и 14, логический элемент 13 блока 1 контроля величины перемещения вырабатывает сигнал Реверс о порядке коммутации обмоток, поступающий на коммутатор 5, и сигнал уровня логической 1. поступающий на вход Сброс третьего счетчика 7 и
на второй (управляющий) вход ключа 3. Ключ 3 начинает пропускать импульсы генератора 2 на счетный вход С первого счетчика 4, который отсчитывает (2П|-1) импульса и про- пускает (2т)-ый импульс в момент времени t2 на вход коммутатора 5 и на счетный вход С второго счетчика 6. Шаговый двигатель 9 . отрабатывает один шаг и на вход С или С (в зависимости от направления вращения 0 вала шагового двигателя) реверсивного счетчика 18 блока 1 контроля величины перемещения поступает импульс с выхода первого счетчика 4 для подсчета количества шагов. Одновременно второй счетчик 6 вы- 5 дает импульс на счетный вход С третьего счетчика 7 и последний изменяет свое состояние на единицу. Младший разряд дешифратора 8 сбрасывается в состояние логического О, а следующий - устанавли- 0 вается в состояние логической 1. Теперь коэффициент деления первого счетчика 4- равен , а второго счетчика 6 - соответственно 2. На первый вход коммутатора 5 поступают два импульса с частотой следоза- 5 ния , где f - частота генератора 2 тактовых импульсов. По второму импульсу третий счетчик 7 в момент времени t3 изменяет свое состояние, на вход коммутатора 5 поступают четыре импульса с частотой сле- 0 дования f/2() и т.д.
При дальнейшем изменении состояния третьего счетчика 7 дешифратор 8 в момент времени t4 устанавливает уровень логической 1 на выходе старшего разряда, сле- 5 довательно, коэффициент деления первого счетчика равен 2, а второй счетчик 6 прекращает счет импульсов, так как на инверсном входе разрешения счета V0 устанавливается также уровень логической 1. Устройство 0 переходит в установившийся режим с максимальной скоростью вращения вала шагового двигателя 9.
Таким образом, за счет задания количества импульсов, следующих с нарастающей 5 частотой, обеспечивается необходимый для ручного режима управления режим разгона шагового двигателя 9 с малой начальной скоростью и постепенным ее нарастанием. Устройство работает в смешанном ре- 0 жиме управления, т.е. управляется вручную в режиме программирования (обучения) и автоматически после обучения.
В ручном режиме по командам оператора производится перемещение рабочего ор- 5 гана, имеющего привод от шагового двигателя, до совмещения его с позицией установки радиоэлементов. Направление перемещения задается оператором. Совпадение рабочего органа с позицией опреде- ляется оператором визуально, при этом
производится снятие команды и происходит останов шагового двигателя Так как перемещение рабочего органа производится на большие расстояния, то для сокращения времени программирования необходимо перемещение с максимально допустимой скоростью. При этом оператору невозможно остановить рабочий орган точно на позиции из-за инерционности между принятием решения оператором и прекращением подача команды на перемещение.
Несовпадение рабочего органа с позицией достигает 1-3 мм, требуемая точность позиционирования - 0,5 мм. Дня устранения несовпадения необходимо перемещение рабочего органа на малые расстояния 1-3 мм и на малой скорости причем, чем меньше требуемое перемещение, тем меньше должна быть скорость.
Возврат в исходное положение в ручном режиме осуществляется после программирования устройства, Для программирования устройства нажимается переключатель 17, триггер 12 устанавливается в единичное состояние, разрешая прохождение команд Вперед (Назад) через логические элементы 13 и 14, командами Вперед (Назад рабочий орган устанавливается в исходное положение.
При нажатии переключателя 25 происходит сброс счетчика 23 и через логический элемент 10 сброс счетчика 18. После нажатия переключателя 21 происходит запоминание координат исходного положения в запоминающем устройстве 20, содержимое счетчика 23 увеличивается на 1
По командам Вперед (Назад) рабочий орган выводится на первую позицию установки радиоэлемента После нажатия переключателя 21 происходит запоминание координаты первой позиции и т.д. По окончании запоминания всех позиций нажимают переключатель 24. При этом триггер 12 сбрасывается, запрещая прохождение команд Вперед (Назад) через логические элементы 13 и 14 и прохождение лог. О с переключателя 25 через логический элемент 10. При нажатии переключателя 25 происходит сброс счетчика 23 и на элементы сравнения 27 поступают со счетчика 18 координаты положения рабочего органа на последней записанной позиции, а с запоминающего устройства 20 - координаты исход- ного положения. После нажатия переключателя 26 триггер 11 устанавливается в состояние логической 1 и рабочий
орган перемещается в исходное положение следующим образом.
Элемент 27 сравнения вырабатывает сигнал рассогласования, поступающий че5 рез логический элемент 13 на линию Реверс и через логический элемент 28 на линию Сброс, и начинается движение шагового двигчтеля в исходное положение. По линии Счет через логический эпемент 15
0 на вход С счетчика 18 поступают импульсы, уменьшающие содержимое счетчика. При возвращении рэбоче1О органа в исходное положение счетчик обнуляется, элемент 27 сравне; гя гырабагысает сигкач А-В.
5 триггер 11 сбрасывается и движение прекращается При поспедэвательком нажатии переключавекя 26 в автоматическом режиме) рабочий орган- перемещается на позиции, координаты котооых ЗРПИСЭНЫ Б
0 запоминающем устройстве 20
Формула изобретения Устройство для управления шаговым двигателем, содержащее блок контроля ее5 личины перемещения с шинами управления Вперед и Назад, генератор тактовых импульсов, ключ, коммутатор, имеющий выходные клеммы для подсоединения к двигателю, причем выход генераторл чод0 ключей к первому входу ключа, второй вход которого подключен к первому выходу блока контроля величины перемещения, отличающееся тем, что, с целью расширения эксплуатационных возможностей снабже5 но т ремя сче гчиками и дешифратором, име ющими каждый по m разрядов причем выход ключа подключен к счетному входу первого счетчика, выход которого подключен к входу коммутатора и одновременно к
0 входу Счет контроля величины перемещения и к сметному входу вт орого счетчика, выход которого подключен к счетному входу третьего счетчика, вход Сброс последнего обьединен с вторым входом ключа,
5 выходы третьего счетчика чрпез дешифратор подключены к информац 5 -иным входам первого и второго счетчиков фичем выход n-го разряда дешифратора подключен к (гл п+1)-му разряду входа управления первого
0 счетчика и к п-му разряду информационного входа второго счетчика, кроме того, старший разряд выхода дешифратора подключен к входу разрешения счета второго счетчика, а второй выход блока контроля
5 величины перемещения соединен с входом направления коммутатора
MML-U LLJ..L-i
, л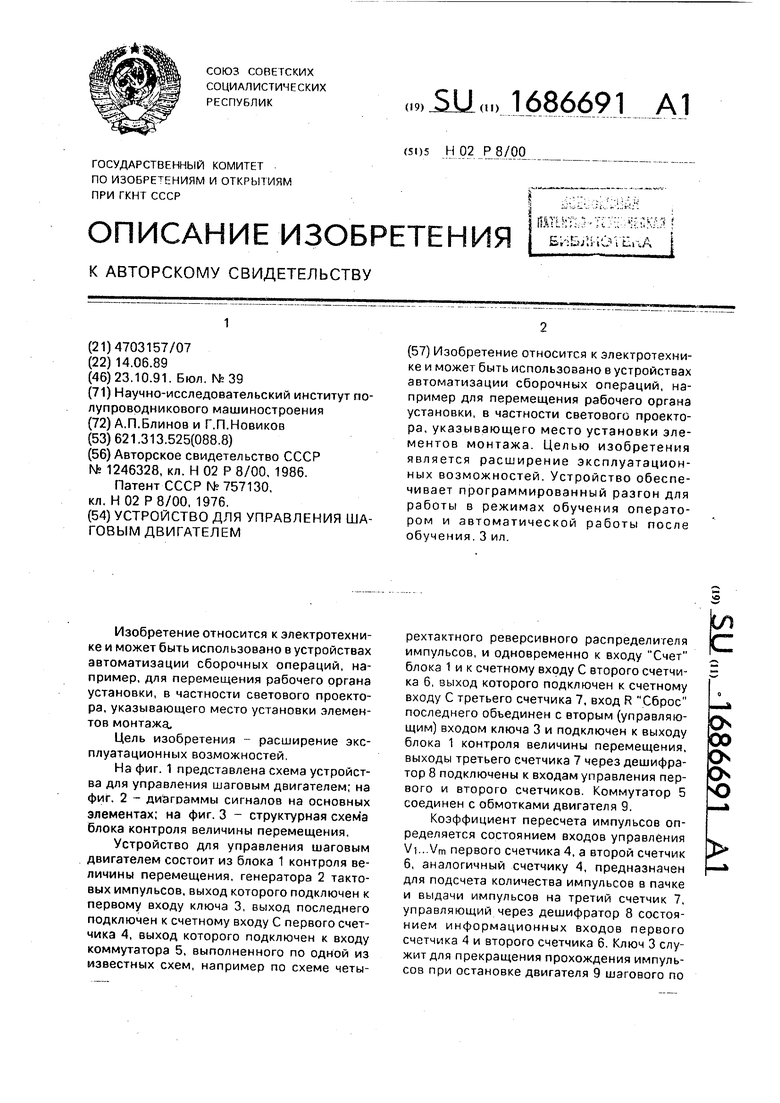
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым двигателем | 1982 |
|
SU1046893A1 |
| Устройство для контроля печатных плат | 1986 |
|
SU1472929A1 |
| Рыборазделочная машина | 1973 |
|
SU506368A1 |
| Устройство для программного управления | 1978 |
|
SU744464A1 |
| Устройство для программного управления намоточным станком | 1989 |
|
SU1725184A1 |
| Система управления приводным пневматическим молотом | 1986 |
|
SU1353561A1 |
| Устройство для программного управления намоточным станком | 1990 |
|
SU1784942A1 |
| Способ старт-стопного управления шаговым двигателем | 1986 |
|
SU1363417A1 |
| Устройство управления электрофицированной дождевальной машиной | 1988 |
|
SU1547783A1 |
| Устройство для управления группой шаговых электродвигателей | 1981 |
|
SU1073871A2 |
Изобретение относится к электротехнике и может быть использовано в устройствах автоматизации сборочных операций, например для перемещения рабочего органа установки, в частности светового проектора, указывающего место установки элементов монтажа. Целью изобретения является расширение эксплуатационных возможностей. Устройство обеспечивает программированный разгон для работы в режимах обучения оператором и автоматической работы после обучения. 3 ил.
г
1Г
. } и
гг c-jг
лф
paa,-.-J/ ft .-г
i,cj i/J ,1-1 ;ч/ Ssy - ---iV
,a-4
xj f в
расой pzddug
U.
Ib991i9l
| Устройство для управления шаговым двигателем | 1984 |
|
SU1246328A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент СССР №757130, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
