I
Изобретение относится к автоматически управляемым транспортным средствам и мо жет найти применение при передвижении железнодорожных вагонов при их загрузке различными грузами, а также для установки вагонов на весы или в вагоноопрокидыватель.
Известно устройство автоматического управления маневровой тележкой,содержащее задатчик типа вагонов и блок управления, одни из выходов которого подключены к приводам механизмов перемещения тележки и сцепления ее с вагоном 1.
Недостатком известного устройства является невысокая его точность из-за отсутствия непосредственного измерения пути, пройденного маневровой тележкой, и ненадежности срабатывания отдельных его элементов (фотореле, педальных конечныхвыключателей),
Целью изобретения является- йовышение точности управления.
Цель достигается тем, что устройство, содержащее вышеуказанные признаки, снабжено измерителем пройденного пути с подключенными к его выходу счетчиками прямого и обратного направлений, подключенными к их выходам одними входами блоками совпадения, подключе шыми к их другим входам задатчиками пути, и блоками памяти, входы одного из которых подключены к задатчику типа вагоиов, а выходы к задатчику пути и одному из входов другого блока памяти, другие входы кото10рого соединены с выходами блоков совпадения j а выходы - со входами задатчиков пути, при этом выходы блоков совпадения подключены ко входам блока управления, другие выходы которого соединеISны со входами сброса счеггчиков.
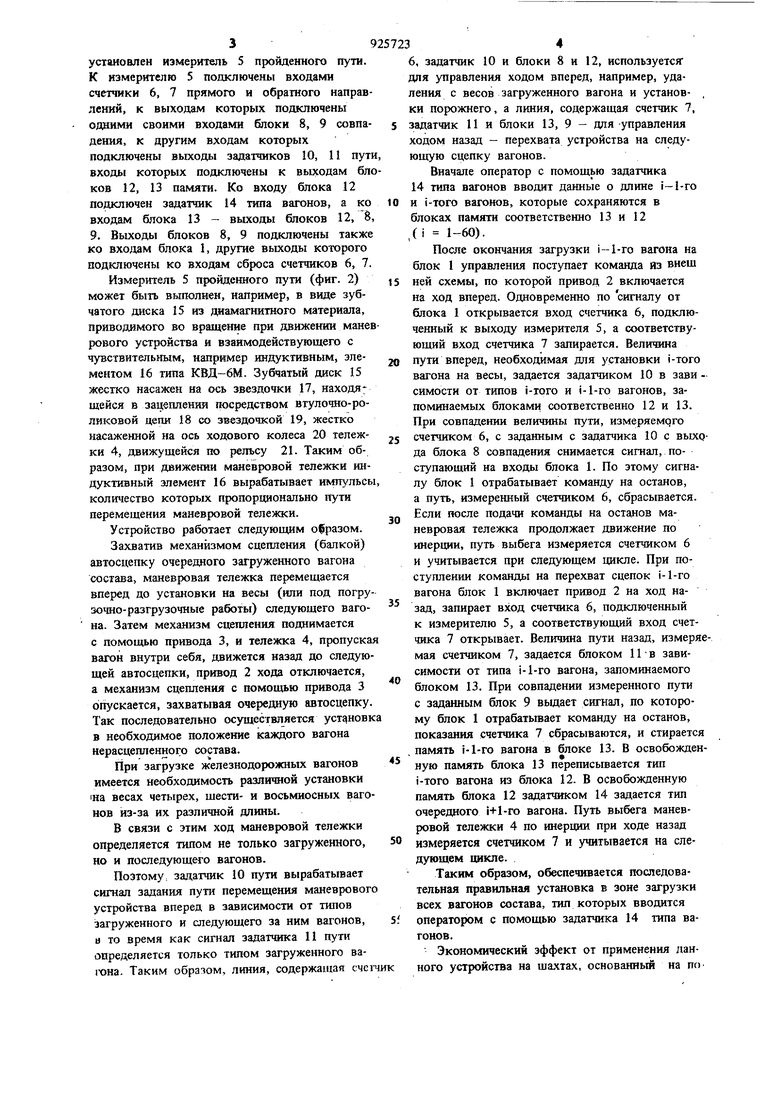
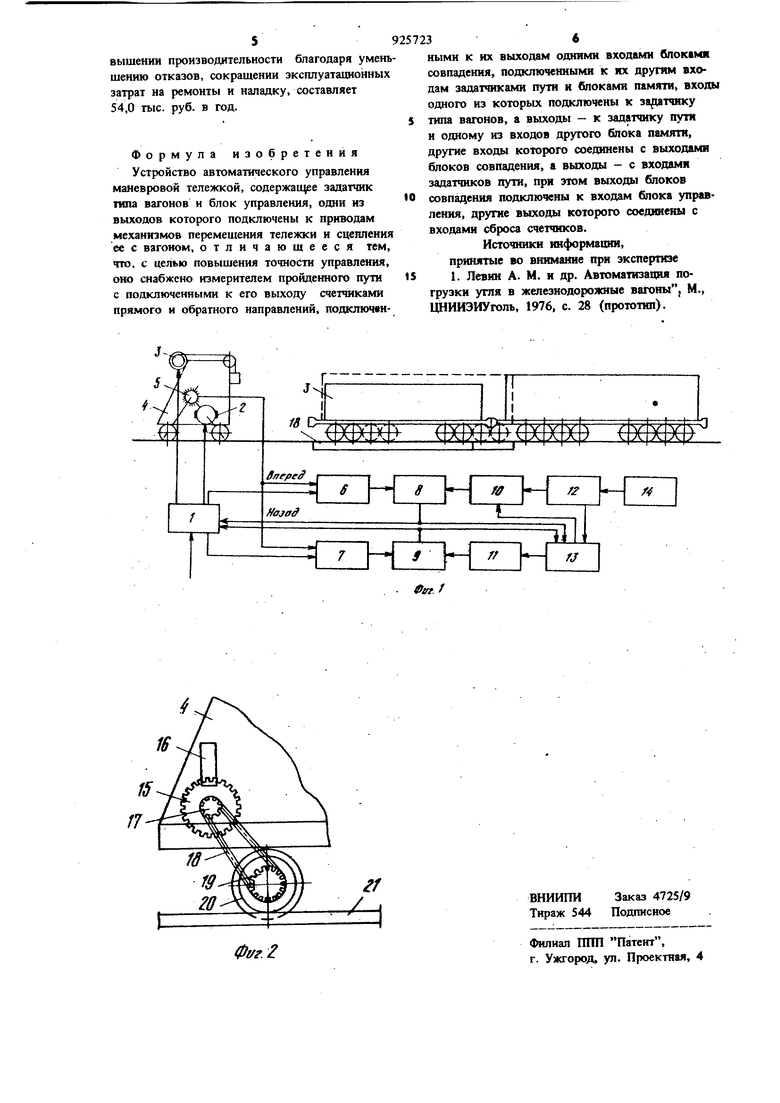
На фиг. 1 изображена функщюнальная схема устройства; на фиг, 2 представлена конструк1щя измерителя пройденного пути.
Устройство (фиг. 1) содержит блок 1
20 управления, подключенный одними своими . выходами к приводам 2 механизма перемещения и 3 сдепленйя с вагоном, размещенными на тележке 4, на. которой также установлен измеритель 5 пройденного пути. К измерителю 5 подключены входами счетчики 6, 7 прямого и обратного направлений, к выходам которых подключены одними своими входами блоки 8, 9 совпадения, к другим входам которых подключены выходы задатчиков 10, 11 пут входы которых подключены к вькодам бл ков 12, 13 памяти. Ко входу блока 12 подключен задатчик 14 типа вагонов, а ко входам блока 13 - выходы блоков 12, S 9. Выходы блоков 8, 9 подключены также ко BXOJWM блока 1, другие выходы которого подключены ко входам сброса счетчиков 6, 7. Измеритель 5 прюйденного пути (фиг. 2) может быть выполнен, например, в виде зубчатого диска 15 из даамагнитного материала, приводимого во вращение при движении манев рового устройства и взаимодействующего с чувствительным, например индуктивным, элементом 16 типа КВД-6М. Зубчатый диск 15 жестко насажен на ось звездочки 17, находя; щейся в зацеплений посредством втулочно-роликовой цепи 18 со звездочкой 19, жестко насаженной на ось ходового колеса 20 тележки 4, движущейся по рельсу 21. Таким образом, при движении маневровой тележки индуктивный элемент 16 вырабатывает импульсы количество которых пропорционально пути перемещения маневровой тележки. Устройство работает следующим образом. Захватив механизмом сцепления (балкой) автосцепку очередного загруженного вагона состава, маневровая тележка перемещается вперед до установки на весы (или под погрузочно-разгрузочные работы) следующего вагона. Затем механизм сцепления поднимается с помощью привода 3, и тележка 4, пропуская вагон внутри себя, движется назад до следующей автосцепки, привод 2 хода отключается, а механизм сцепления с помощью привода 3 опускается, захватывая очередную автосцепку. Так последовательно осуществляется установк в необходимое положение каждого вагона нерасцепленного состава. При загрузке железнодорожных вагонов имеется необходимость различной установки |на весах четырех, щести- и восьмиосных вагонов из-за их различной длины. В связи с этим ход маневровой тележки определяется типом не только загруженного, но и последующего вагонов. Позтому, задатчик 10 пути вырабатывает сигнал задания пути перемещения маневрового устройства вперед в зависимости от типов загруженного и следующего за ним вагонов, и то время как сигнал задатчика И пути определяется только типом загруженного вагона. Таким образом, линия, содержащая сче1-ч 6, задатчик 10 и блоки 8 и 12, используется для управления ходом вперед, например, удаления с весов загруженного вагона и установки порожнего, а линия, содержащая счетчик 7, задатчик 11 и блоки 13, 9 - для управления ходом назад - перехвата устройства на следующую сцепку вагонов. Вначале оператор с помощью задатчика 14 типа вагонов вводит данные о длине i-1-го и (-того вагонов, которые сохраняются в блоках памяти соответственно 13 и 12 (i 1-60). После окончания загрузки i-1-го вагона на блок 1 управления поступает команда из внеш ней схемы, по которой привод 2 включается на ход вперед. Одновременно по сигналу от блока 1 открывается вход счетчика б, подключенный к выходу измерителя 5, а соответствующий вход счетчика 7 запирается. Величина пути вперед, необходимая для установки i-того вагона на весы, задается задатчиком 10 в зави симости от типов i-Toro и i-1-го вагонов, запоминаемых блоками соответственно 12 и 13. При совпадении величины пути, измеряемого счетчиком 6, с заданным с задатчика 10 с выхода блока 8 совпадения снимается сигнал, поступающий на входы блока 1. По этому сигналу блок 1 отрабатывает команду на останов, а путь, измеренный счетчиком 6, сбрасывается. Если после подачи команды на останов маневровая тележка продолжает движение по инерции, путь выбега измеряется счетчиком 6 и учитывается при следующем цикле. При поступлении команды на перехват сцепок i-1-го вагона блок 1 включает привод 2 на ход назад, запирает вход счетчика 6, подключенный к измерителю 5, а соответствующий вход счетчика 7 открывает. Величина пути назад, измеряемая счетчиком 7, задается блоком Ив зависимости от типа i-1-го вагона, запоминаемого блоком 13. При совпадении измеренного пути с заданным блок 9 вьщает сигнал, по которому блок 1 отрабатывает команду на останов, показания счетчика 7 сбрасываются, и стирается память i-1-го вагона в блоке 13. В освобожденную память блока 13 переписывается тип 1-того вагона из блока 12. В освобожденную память блока 12 задатчиком 14 задается тип очередного i+1-го вагона. Путь выбега маневровой тележки 4 по инерции при ходе назад измеряется счетчиком 7 и учитывается на следующем цикле. Таким образом, обеспечивается последовательная правильная установка в зоне загрузки всех вагонов состава, тип которых вводится оператором с помощью задатчика 14 типа вагонов. Экономический эффект от применення данного устрюйства на шахтах, основанный на повышенни производительности благодаря умень шению отказов, сокращении эксплуатационных затрат на ремонты и наладку, составляет 54,0 тыс. руб. в год. Формула изобретения Устройство автоматического управления маневровой тележкой, содержание задатчик типа вагонов и блок управления, одни из выходов которого подключены к приводам механизмов перемещения тележки и сцепления ее с вагоном, отличающееся тем, что, с целью повыщения точности управления, оно снабжено измерителем пройденного пути с подключенными к его выходу счегшками прямого н обратного направлений, подключенными к их выходам одними входами блоками совпадения, подключенными к нх другим входам задатчиками пути и блоками памяти, входы одного из которых подключены к за тчику типа вагонов, а выходы - к задатчику пути и одному из входов другого блока памяти, другие входы которого соединены с выходами блоков совпадения, а выходы - с входами задатчиков пути, при этом выходы блоков совпадения подключены к входам блока управления, другие выходы которого сосдкиены с входами сброса счетчиков. Источники информации, принятые во внимание при экспертизе 1. Левин А. М. и др. Автоматизация по грузки угля в железнодорожные вагоны, М., ЦНИИЭИУголь, 1976, с. 28 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ МАНЕВРОВОГО ЛОКОМОТИВА | 2005 |
|
RU2284275C1 |
| Устройство для управления погрузкой сыпучих материалов из бункеров в движущийся состав | 1977 |
|
SU691371A1 |
| Устройство для управления маневровыми маршрутами с локомотива | 1983 |
|
SU1168460A1 |
| Устройство для определения положения вагона на платформе весов и управления маневровым механизмом | 1976 |
|
SU657269A1 |
| ПУТЕОЧИСТИТЕЛЬНАЯ МАШИНА | 1997 |
|
RU2143029C1 |
| Устройство для автоматическойпОгРузКи СыпучиХ гРузОВ ВдВижущиЕСя ТРАНСпОРТНыЕ СРЕдСТВА | 1978 |
|
SU806579A1 |
| Система передачи ответственной информации о маршрутах приема/отправления и кодах АЛС | 2018 |
|
RU2701274C1 |
| Способ управления технологическим процессом железнодорожной станции | 2020 |
|
RU2738779C1 |
| Устройство управления электрифицированной дождевальной машиной | 1990 |
|
SU1745158A1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ПОДВИЖНОГО СОСТАВА ИЛИ ЛОКОМОТИВА С ПРИБЫВАЮЩИМ ИЛИ ОТПРАВЛЯЮЩИМСЯ СО СТАНЦИИ ПОЕЗДОМ | 2004 |
|
RU2288856C2 |
