со
ISD
1137
Изобретение относится к машиностроению, в частности к средствам гидроавтоматики, и может быть использовано в механизмах дискретного перемещения .
Целью изобретения является повышение надежности и увеличение быстродействия привода.
На чертеже представлена конструктивная схема привода.
Гидравлический цифровой привод содержит источник 1 питания, много- позиционный гидроцилиндр 2 с последовательно расположенными в нем с образованием рабочих 3-5 и возвратной 6 полостей поршнями 7-9 с ходами S, 2S и 4S, демпфирующее устройство, имеющее дешифратор 10 с входными 11- 18 и выходными 19 каналами, обратньш клапан 20 и тормозной гидроцилиндр 21, в котором расположен поршень 22 с односторонним штоком 23 с образованием поршневой 24 и штоковой 25 полостей. Вдоль образующей (не показана) гвдроцилиндра 21 равномерно с шагом S, равным ходу младшего разряда, выполнены внутренние кольцевые расточки 26-33, а ширина последних равна ширине поршня 22 тормозного гид- роцилиндра 21. Расточки 26-33 соответственно подключены к входным каналам 11-18, дешифратора 10. Шток 23 тормозного гидроцилиндра 21 жестко связан со штоком 34 многопозиционного гидроцилиндра 2, а эффективная площадь поршня 9 со стороны возвратной полости 6 выполнена больше эффективной площади 22 тормозного гидро- цилиндра 21, при этом поршневая 24 и штоковая 25 полости соответственно подключены к источнику 1 питания через обратный клапан 20 и непосредст-: венно, а выходной канал 19 дешифратора 10 - к возвратной полости 6. Кроме того, дешифратор содержит подпружиненные золотники 35-37.
Гидравлический цифровой привод работает следующим образом.
В положении, представленном на чертеже, управляющие сигналы поданы в рабочую полость 4 и на золотник 36. При этом поршень 8 и золотник 36 занимают крайние правые по чертежу поло
5
5
122
При отработке, например, комбина- ции управляющих сигналов 101 сначала эта комбинация подается на золотники 35 и 37, а затем отключается сигнал с золотника 36. При таком положении золотников 35-37 дешифратора 10 полость 25 через кольцевую расточку 31, входной 16 и выходной 19 каналы соединена с возвратной полостью 6. После переключения золотников 35- 37 подается эта же комбинация управляющих сигналов 101 на многопозиционный гидроцилиндр 2. Рабочая жидкость поступает в полости 3 и 5, а полость 4 сообщается со сливом. Вследствие того, что суммарная эффективная площадь поршней 7 и 9 со стороны полостей 3 и 5 и поршня 22 со стороны по-
0 лости 24 больше суммарной эффективной площади поршней 9 и 22 со стороны соответствуюшд1Х полостей 6 и 25, поршни 7-9 двигаются вправо по чертежу, а шток 34 перемещается на величину 3S. Так как полость 24 не соединена с выходным каналом 19, от исходного положения шток 34 может переместиться только вправо, что исключает его движение в противоположную сторону. Вместе со штоком 34 перемещается поршень 22, который в конце хода перекрывает кольцевую расточку 31, вследствие чего давление в полости 6 растет, а скорость пере-
5 мещения штока 34 уменьшается пропорционально степени перекрытия кольцевой расточки 31.
При переключении, например, комбинации управляющих сигналов 101 на
0 комбинацию 010 сначала переключаются золотники 35-37 дешифратора 10. Золотник 36 занимает крайнее правое по чертежу положение, а золотники 35 и 37 левое положение. Полость 24 через
45 кольцевую расточку 28, входной 13 и выходной 19 каналы соединяются с полостью 6. После переключения золотников 35-37 подается эта же комбинация управляющих сигналов 010 на многопосл зиционный гидроцилиндр 2. Рабочая жидкость подается в полость 4, а полости 3 и 5 сообщены со сливом. При этом шток 34 перемещается влево от предыдущего исходного положения на
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический цифровой привод | 1986 |
|
SU1418513A1 |
| Пневмогидравлический цифровой привод | 1980 |
|
SU943445A1 |
| Устройство для уплотнения балласта железнодорожного пути | 1989 |
|
SU1710637A1 |
| Устройство для управления секцией гидрофицированной крепи | 1989 |
|
SU1705589A1 |
| Пневмогидравлический цифровой привод | 1980 |
|
SU926382A1 |
| УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ | 2005 |
|
RU2291299C1 |
| Погрузочно-транспортная машина | 1990 |
|
SU1767197A1 |
| РЕВЕРСИВНЫЙ ГИДРОПРИВОД | 2008 |
|
RU2376502C1 |
| Гидропанель управления реверсом привода ползуна | 1977 |
|
SU742630A1 |
| Гидроимпульсный привод вибропресса | 1989 |
|
SU1697969A1 |
Изобретение м.б. использовано в механизмах дискретного перемещения. Цель изобретения - повьпвение надежности и увеличение быстродействия привода. Для этого тормозной гидро- цидиндр выполнен с односторонним штоком 23. Шаг расположения кольцевых расточек равен ходу младшего разряда, а ширина расточек - ширине поршня 22 тормозного гидроцилиндра 21. Поршневая и штоковая полости 24 и 25 последнего соответственно подключены к источнику питания через обратный клапан, Входной канал дешифратора 10 подключен к возвратной полости 6. Шток 23 цилиндра 21 жестко связан с штоком 34 многопозиционного гидроцилиндра 2. Такая конструкция привода обеспечивает быстрый подвод и надежное демпфирование в конце перемещения штока 34, и позволяет исключить незапрограммированное движение в начале перемещения штока 34. 1 ил. л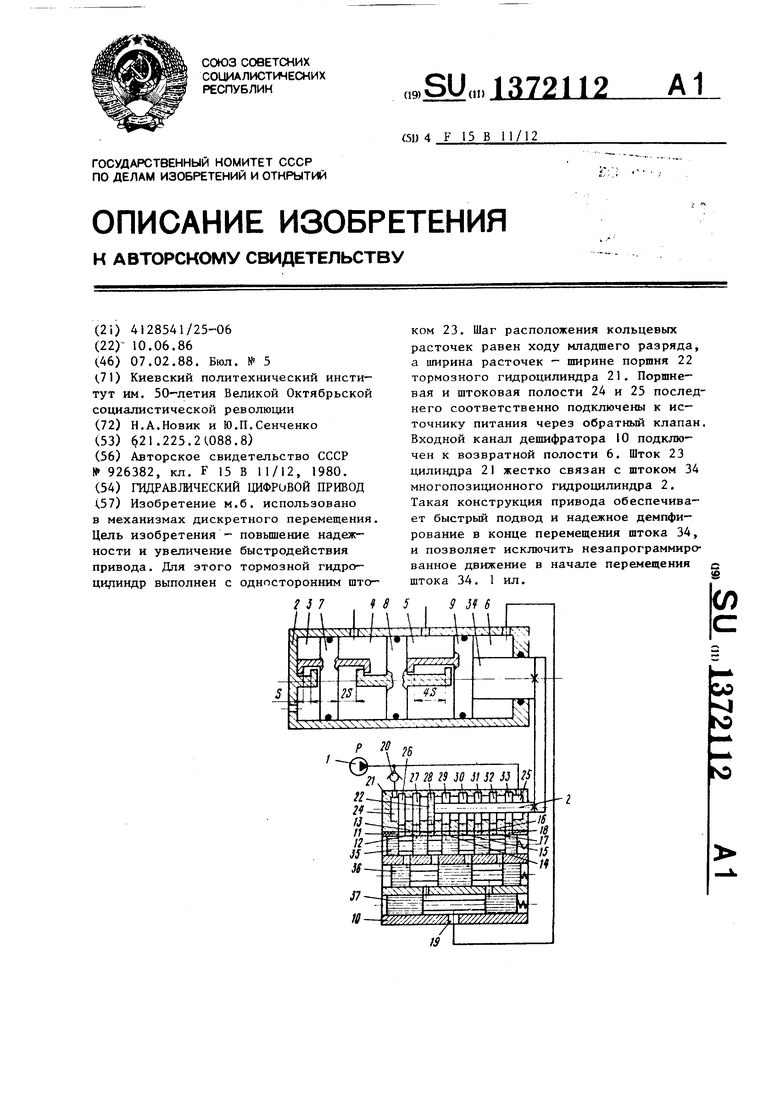
жения, а поршень 22 тормозного гидро- 55 величину, равную 3S. Вследствие того,
цилиндра 21 перекрывает кольцевую расточку 28, что в двоичном коде соответствует отработанной комбинации управляющих сигналов 100.
что эффективная площадь поршня 9 со стороны полости 6 больше эффективной площади поршня 11 и выход жидкости из полости 6 закрыт обратным клапаном
что эффективная площадь поршня 9 со стороны полости 6 больше эффективной площади поршня 11 и выход жидкости из полости 6 закрыт обратным клапаном
31
20, то от исходного положения шток 34 может перемещаться только влево, что исключает возможность появления незапрограммированного движения. При подходе штока 34 в заданную позицию перекрывается кольцевая расточка 28. Давление в полости 24 увеличивается, а давление в полости 6 уменьшается. При этом скорость перемещения штока 34 уменьшается пропорционально степени перекрытия кольцевой расточки 28.
Аналогично привод работает и при отработке других комбинаций управляющих сигналов.
Таким образом, в предложенном приводе исключается незапрограммирован- ное движение в начале перемещения штока 34, обеспечиваются быстрый подвод и надежное демпфирование в конце его перемещения за счет изменения давления как в полости 6, так и в полостях 24 и 25, что позволяет повысить надежность и увеличить быстродействие привода.
Формула изобретения
Гидравлический цифровой привод, содержащий источник питания, много- позиционный гидроцилиндр с последова- тельно расположенными в нем с образо12
ванием рабочих и возвратной полостей поршнями и штоком, демпфирующее устройство, включающее дешифратор с входными и выходным каналами, обратный клапан и тормозной гидроцилиндр, снабженный внутренними кольцевыми расточками, равномерно расположенны ми вдоль его образующей и подключен- ньми к входным каналам дешифратора, при этом шток тормозного гидроцилиндра жестко связан со штоком многопо- зиционного гидроцилиндра, а эффективная площадь поршня многопозиционного гидроТ илиндра со стороны возвратной полости выполнена больше эффективной площади поршня тормозного гидроцилиндра, отличающийся тем, что, с целью повьш1ения надежности и увеличения быстродействия, тормозной гидроцилиндр выполнен с односторонним штоком, шаг расположения кольцевых расточек равен ходу младшего разряда, а ширина расточек - ширине поршня тормозного гидроцилиндра, при этом поршневая и штоковые полости последнего соответственно подключены к источнику питания через обратный клапан и непосредственно, а входной канал дешифратора - к возвратной полости.
| Пневмогидравлический цифровой привод | 1980 |
|
SU926382A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
