(54) НАВЕСНОЕ ОБОРУДОВАНИЕ САМОХОДНОГО ШАССИ
ДЛЯ ЗАХВАТА, ШТАБЕЛИРОВАНИЯ И ТРАНСПОРТИРОВАНИЯ .ДЛИННОМЕРНЫХ ГРУЗОВ
I
Изобретение относится .к песней промышпенности и представляет собой навесное оборудование самоходного шасси, предназначенное для захвата, штабелирования и транспортирования длинномерных грузов.
Известно навесное оборудование самоходного шасси для захвата, штабелирования и транспортирования длинномерных грузов, содержащее раму, на которой установлены шарнирно соединенные между собой и поворотные посредством гидроцилиндров стрела и рукоять с подвешенным грузозахватным органом, и фиксирующее грузозахватный орган относительно стрелы устройство ij.
Однако известное устройство имеет сложное конструктивное исполнение.
Цель изобретения - упрощение конструкции.
Поставленная цетш достигается тем, что фиксирующее устройство выполнено в виде смонтированного на грузозахватном органе кронштейна и балки, закрепленной на раме нихш линии, соединяющей ось поворота стрелы с точкой подвеса грузозахватного органа.
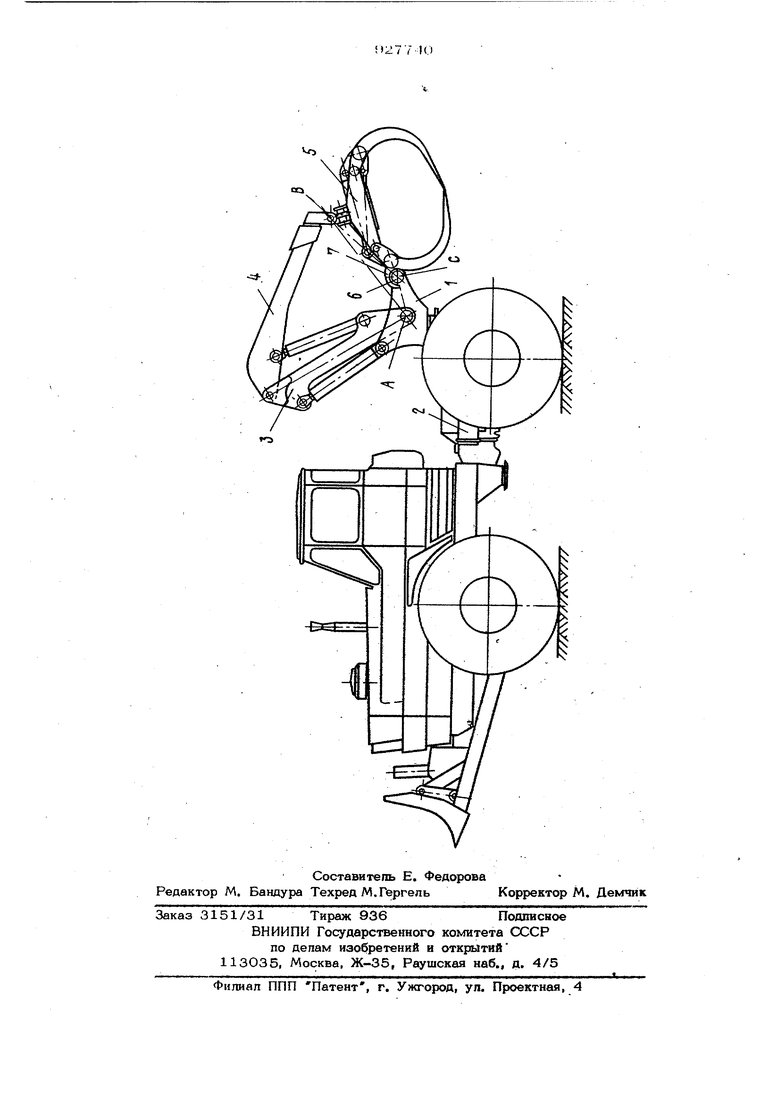
На чертеже показано самоходное шасси с навесным оборудованием, общий вид.
Навесное оборудование включает неподвижную или поворотную раму 1, установленную на раме 2 самоходного шасси. На раме 1 установлена стрела 3 с рукоятью 4 и с грузозахватным органом 5. В транспортном положении грузозахватный орган 5 с размещенным в нем грузом фиксируется -относительно рамы 2 при помощи устройства, включающего балку 6 и кронштейн 7. Балка 6 смонтирована на раме 1, а кронштейн 7 - на грузозахватном органе 5.
На чертеже буквой А обозначена ось поворота стрелы 3; буквой В - точка подвеса грузозахватного органа; буквой С - ось балки 6.
Устройство работает спедуюшим образом .,
Грузозахватный орган 5 посредством стрелы и рукояти устанавливается в транспортное положение. Дпя этого движением стрепы 3 при определенном положении рукояти 4 захват 5 .подводится к балке 6, Затем движением рукояти захват 5 опускается, при этом челюсть захвата перемещается по балке 6 до упора в кронштейн 7, После чего гидроцилиндр стрюпы и рукояти запирается, и транспортное средство готово к передвижению. Причем ось бапки 6 в точке С расположена ниже линии, соединяющей точки А и В. При транспортировании под действием силы тяжести от масс захвата, груза и рукояти навесное оборудование стремится повернуться вокруг точки А. В то же время зафиксированный относительно рамы 1 захват образует вторую ось вращения навесного оборудования в точке С. Для того, чтобы навесное оборудование провернулось вокруг точки А,. необходимо чтобы величина АВ равнялась сумме АС+СВ, но поскольку расстояние АС-ЮВ больше АВ, то про исходит постоянное поджатие челюсти к балке 6 и исключается возможность поворота навесного оборудования вокруг точки А. Тем самым обеспечивается надежная фиксация грузозахватного органа относительно рамы, и создается одномассовая система машина-груз, в результате чего уменьшаются динамические воздействия на базовую машину от навесного оборудования и груза.
В данном устройстве обеспечивается простота конструкции с одновременным
автоматическим поджатием груза в грузозахватном органе, так как в результате воздействия реакции от балки на челюсть грузозахватного органа последняя стремится ловернуться вокруг своей оси вращения в сторону груза и. за счет синхронизирующей тяги, имеющейся в захвате, противоположная челюсть также стремится переместиться в сторону груза.
Формула изобретения
Навесное оборудование самоходного щасси для захвата, штабелирования и транспортирования длинномерных грузов, содержащее рам, на которой установлены шарнирно соединенные между собой и поворотные посредством гидроцилиндров стрела и рукоять с подвешенным грузозахватным органом, и фиксирующее грузозахватный орган относительно стрелы устройство, отличающееся тем, что, с целью упрощения конструкции, фиксирующее устройство выполнено в виде смонтированного на грузозахватном органе кронштейна и балки, закрепленной на раме ниже линии, соединяющей ось поворота стрелы с точкой подвеса грузозахватного органа.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельства СССР № 5О4694, кл. А O1G 23/dS, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство для погрузки и перевозки длинномерных грузов | 1983 |
|
SU1131704A1 |
| Погрузчик | 1989 |
|
SU1687571A1 |
| НАВЕСНОЙ САМОПОГРУЗЧИК К САМОХОДНОМУ ШАССИ | 1966 |
|
SU185264A1 |
| Погрузчик | 1976 |
|
SU767014A1 |
| Транспортное средство для перевозки длинномерных грузов | 1982 |
|
SU1024320A1 |
| Погрузчик для лесоматериалов | 1977 |
|
SU679519A1 |
| Устройство для выполнения земляных работ | 1985 |
|
SU1328436A1 |
| Агрегат для погрузки, транспортировкии РАзгРузКи длиННОМЕРНыХ гРузОВ | 1979 |
|
SU835946A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С УСТРОЙСТВАМИ САМОЗАГРУЗКИ И САМОРАЗГРУЗКИ | 1990 |
|
RU2031016C1 |