Изобретение относится k системам автоматического регулирования технологических параметров, например давления, расхода и уровнях в условиях ждущего режимами может быть использовано в химической, нефтяной, газовой, пищевой и других отраслях промышленности. Известен аналоговый регулятор, вы полняющий пропорционально-интегрально-дифференциальный (ПИД) закон регулирования, состоящий из последовательно соединенных первичного преобр зователя, измерительного блока с задатчиком, ПИД регулятора и исполнительного устройства. Известный регул тор используется в системах автомати ческого регулирования технологически параметров, задание на котором в период нормального технологического ре жима (период ожидания) устанавливается больше или меньше, чем величи на технологического параметра, например противоположный регулятор рас хода центробежного компрессора или регулятор давления пара (газа) сбросом в атмосферу tl , 1 звестен регулятор, содержащий первичный преобразователь и задатчик, выходы которых соединены соответственно через первый и второй входы сумматора с ПИД-регулятором, выход которого соединен с входом исполнительного механизма 23. Недостатком известных устройств является низкое быстродействие Цель изобретения - повышение быстродействия устройства. Поставленная цель достигается тем, что в регулятор введены последовательно соединенные второй задатчик и логический блок, второй вход которого соединены с выходом ПИД-регулятора, а выход - с третьим входом сумматора « На чертеже представлена блок-схема устройства.
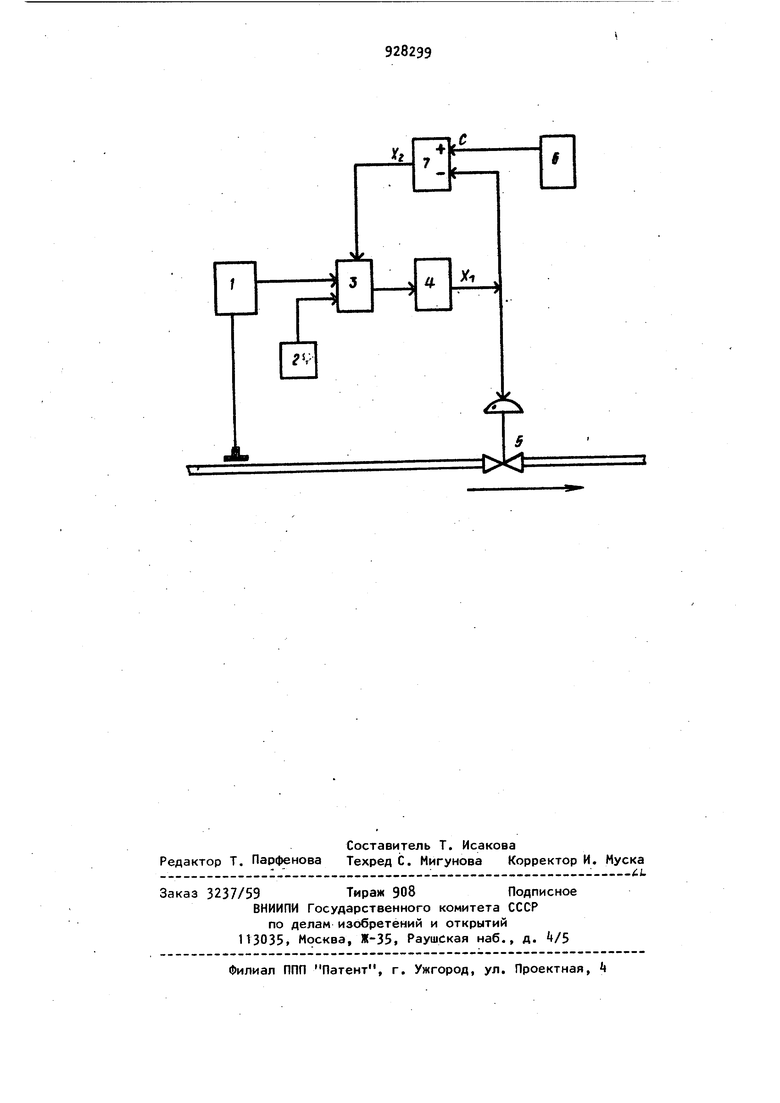
Схема включает в себя первичный преобразователь (датчик) 1, первый задатчик 2, сумматор 3, ПИД-регулятор k, исполнительный орган 5, второй задатчик 6 и логический блок 7.
Устройство работает следующим образом.
Задание от задатчика 2 поступает на вход сумматора 2. В сумматоре 3 сигнал задания алгебраически складывается с сигналом параметра от первичного преобразователя 1 и сигналом Хп QT логического блока 7. Выходной сигнал из сумматора 3 поступает на ПИДрегулятор 4, его выходной сигнал поступает в логический блок 7 и на исполнительный орган 5,который открывается или закрывается.
Значение выходного сигнала логического блока 7 равно
Го-х
при с х
1
Ь при с
где X - значение выходного сигнала с
ПИД-регулятора k, с - постоянная.
Исполнительный орган 5 настраивается таким образом, чтобы ход был равен
при X с
У
.к() при X с
В нормальном ждущем режиме задание от задатчика 2 устанавливают, например, больше величины параметра,поступающего от первичного-преобразователя 1 на величину лх с. За счет обратной связи, выполненной на логическом блоке 7 и задатчике 6, выходной сигнал х устанавливается таким, что
с - х , т.е. х с- д X .
При таком режиме исполнительный орга находится в крайнем положении (, при х,;с), а регулятор k поддерживает на своем входе нулевой сигнал.
При увел -чении величины параметра, поступающего от первичного преобразователя 1 величина хя уменьшается, а величина увеличивается. При достижении параметром величины задания, поступающего от задатчика 6, величина х уменьшается до нуля, а . При дальнейшем увеличении параметра регулятора k отрабатывает по ПИД-закону выходной сигнал х, который изменяет положение исполнительного механизма 5 выход Xrt при этом остается равным нулю.
Таким образом, в ждущем режиме регулятор k охвачен обратной связью, а в период регулирования с помощью исполнительного органа 5 обратная связь равна нулю, т.е. исключается.
Предлагаемое изобретение позволяет повысить быстродействие устройства и предотвратить нежелаемое изменение регулируемого параметра.
Формула изобретения
Регулятор с переменной структурой, содержащий последовательно соединенные первичный преобразователь, сумматор, пропорционально-интегрально-дифференциальный (ПИД)-регулятор, исполнительный орган, а также первый задатчик, выход которого соединен с вторым входом сумматора, отличающийс я тем, что, с целью повышения быстродействия устройства, он содержит последовательно соединенные второй задатчик и логический блок, второй вход которого соединен с выходом ПИДрегулятора, а выход - с третьим входом сумматора.
Источники информации, принятые во внимание при экспертизе
1. Эрриот П. Регулирование производственных процессов. М., Энергия,
1967.
2.Электрическая унифицированная система приборов автоматического ре гулирования Каскад. Каталог, т.З, вып. 1, ЦНИИТЭМприборостроения, (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Программный регулятор температуры | 1978 |
|
SU796810A1 |
| Программный регулятор температуры | 1988 |
|
SU1594500A1 |
| Система автоматического управления газотурбинной установкой | 1988 |
|
SU1539356A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| АДАПТИВНЫЙ ИНТЕЛЛЕКТУАЛЬНЫЙ ЛОГИЧЕСКИЙ РЕГУЛЯТОР, РАБОТАЮЩИЙ В УСЛОВИЯХ НЕЧЕТКО ЗАДАННОЙ ИНФОРМАЦИИ | 2014 |
|
RU2579987C2 |
| Пневматический регулятор с переменной структурой | 1978 |
|
SU718834A1 |
| СПОСОБ УПРАВЛЕНИЯ ВИНТОВЫМ МЕХАНИЗМОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013798C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| Адаптивная система управления судовыми силовыми установками | 1981 |
|
SU981935A1 |