(5) СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU972646A1 |
| Реверсивный вентильный электродвигатель | 1985 |
|
SU1297186A1 |
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| Моментный вентильный электродвигатель | 1981 |
|
SU995218A1 |
| Бесконтактный регулируемый электропривод | 1982 |
|
SU1075344A1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1046864A1 |
| Следящая система | 1981 |
|
SU999014A1 |
| Устройство для измерения среднеквадратичной ошибки следящей системы с дистанционной передачей на синусно-косинусных вращающихся трансформаторах | 1980 |
|
SU938174A1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1582292A1 |
I
Изобретение относится к автоматическому регулированию и может быть использовано в радиотехнике и приборостроении.
Известна следящая система, содержащая датчик, приемник, два разделительных фильтра, два фазочувствительных усилителя - П1эеобразователя и моментный двигатель .
Недостатком известной системы является низкая надежность, обусловленная применением разделительных фильтров.
Наиболее близким по технической сущности к предлагаемой является следящая система, содержащая последовательно соединенные датчик, приемник, синусно-косинусный вращающийся трансформатор, выходы которого подключены к первым входам соответственно первого и второго фазочувствительных усилителей, вторые входы которых подключены к выходу источника опорного напряжения, а выходы - к.соответствующим входам моментного двигателя, вал которого механически связан с валом приемника 2 3
Недостатком системы является ее низкая надежность из-за наличия в ее составе синусно-косинусного вращающегося трансформатора.
Цель изобретения - повышение надежности системы.
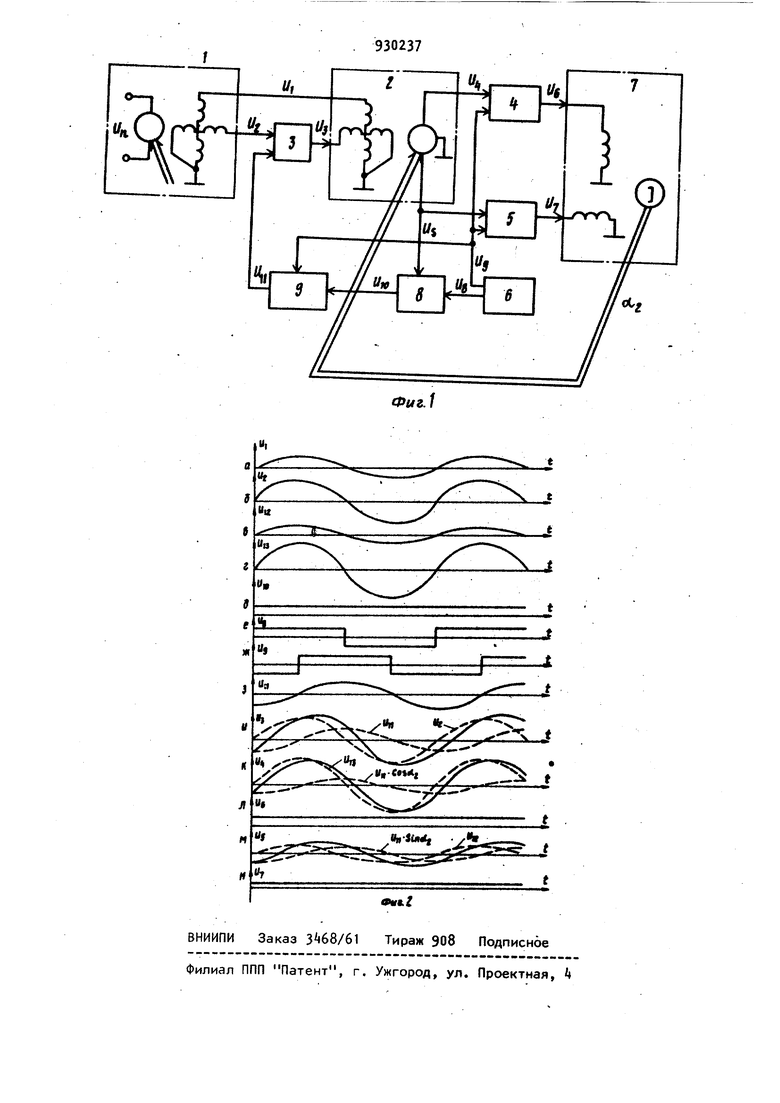
Поставленная цель достигается тем, что в следящей системе, содержащей датчик, первый вы)од которого соединен с первым входом приемника, первый и второй фазочувствительные усилители, первые входы которых подключены к первому выходу источника опорного напряжения, а выходы которых подключены соответственно к.первому и второму входам моментного двигателя, вал которого механически соединен с валом приемника, установлены сумматор и последовательно соединенные третий фазочувствительный усилитель и модулятор, второй вход 3 которого соединен с первым выходом источника опорного напряжения, а выход - с первым входом сумматора, второй вход которого соединен с вто рым входом датчика, а выход - с вто рым входом приемника, первый выход которого подключен к второму входу первого фазочувствительного усилителя, а второй выход - к вторым вхо дам второго и третьего фазочувствительных усилителей, первый вход третьего фазочувствительного усилителя подключен к второму выходу источника опорного напряжения. На фиг. 1 представлена функци- . ональная схема системы; на фиг. 2 временные диаграммы, поясняющие при цип работы системы . Следящаясистема включает датчик 1, приемник 2, сумматор 3, первый и второй фазочувствительные усилители 4 и 5, источник 6 опорного напряжения, моментный двигатель 7, третий фазочувствительный усилит18ль 8, модулятор 9. Кроме того,на схеме обозначены н пряжения и. и и на первом и втором выходах датчика 1 , напряжение U. на выходе сумматора 3, напряжения и и и на первом и втором В1{ ходах приемника 2, напряжения Ux и U7 на выходах усилителей 4 и 5, напряжения Ug и Up на первом и втором выходах источника 6 опорного напряжения, напряжение выходе усили теля 8, напряжение U на выходе модулятора 9, напряжения U. ЛЪ на роторных обмотках приемника 2, угол oil поворота ротора приемника 2 угол at., поворота ротора датчика 1, напряжение U, питания датчика 1 . Система работает следующим образ Если в исходном состоянии углы п ворота роторов датчика 1 M/i/ и при емника 2 joti/равны между собой и составляют, например, 20 , то при повороте ротора датчика 1 на угол о1/1 ЗО на его статорных обмотках возникают напряжения U Uy,s:not (фиг.2а) и и Uy,co.so(. (фиг.2б), где и, - напряжение питания датчика 1. При этом напряжения на роторных обмотках приемника 2 равны U. (фиг.2в) и U-гг cos d, (фиг.2г), где рассогласования следящей системы (для данного случая oL l(f). Напряжение поступает на вход третьег 4 усилителя 8. Опорное напряжение Ug для усилителя 8 поступает с второго выхода источника 6 (фиг. 2е). Усилитель 8 выпрямляет напряжение U и усиливает его. Напряжение Ц с выхода усилителя 8 (фиг. 2д) поступает на модулятор 8, который формирует синусоидальное напряжение ., (фиг.2з). Причем напряжение U сдвинуто по фазе относительно напряжения U-ta. э 90 . Это обеспечивается тем, что опорное напряжение Up для модулятора 9 (фиг. 2ж) сдвинуто по фазе относительно напряжения и0(фиг. 2е) на 90 . Напряжение и, поступает на второй ВХОД сумматора 3, где суммируется с напряжением Ug. Напряжение 1)3 (фиг. 2и) с выхода сумматора 3 поступает на второй вход приемника 2. ,,В .результате на выходе приемника 2 формируются два напряжения Ug- и и4.(фиг. 2к,м). Напряжение ид. представляет собой сумму напряжений и, (L и и со&зб. Аналогично имеем Ug- U + Ц sino. Но напряжения . ifi одной стороны, и ,напряжения U sin о и U coso,, с другой стороны, сдвинуты друг относительно друга на 90 с помощью усилителя 8, модулятора 9 и источника 6. Поэтому с помощью усилителей А и 5 удается выделить из напряжений U и Ug- только напряжения Ц sino и (S cosd/i, Для этого на усилитель , на второй вход которого поступает напряжение U, подается опорное напряжение U , по фазесовпадающее с напряжением U cosctg. Напряжение «е U блокируется в усилителе 4 и «а его выход не проходит. Таким образом, напряжение U на выходе усилителя 4 пропорционально только напряжению U, со5а;1(фиг.2л) . Аналогичным образом работает усилитель 5. На его вход поступает напряжение Ug-. На первый вход усилителя ,5 поступает опорное напряжение Ол, совпадающее по фазе с напряжением U sihofj. Напряжение же Uj, блокируется в усилителе 5 и на его выход не проходит. Таким образом, напряжение Of на выходе усилителя 5 пропорционау1ьно только напряжению и. sinotn (фиг.2н}. Напряжение U пропорционально напряжению . (, т.е. сигналу рассогласования следящей системы. Следовательно, сформированные напряжения (if, и U-/, поступающие на обмотки моментного двигателя 7, пропорциональны сигналу рассогласования следящей системы и связаны с углом поворота ротора двигателя 7 синусоидал ной и косинусоидальной зависимостью что обеспечивает работоспособность следящей системы, а также постоянство момента двигателя 7 по углу поворота ротора при заданном входном сигнале Системы. При рассмотрении работы усилителя 8 в качестве входного сигнала, поступающего на его второй вход, прини мается напряжение 1): Ofj 5 nLyXor я фактически на его вход поступает напряжение Uj- . 4f- si . о так как и и и Sin 0/2.сдвинуты по фазе друг относительно друга на 90, то, подавая на первый вход усилителя 8 опорное напряжение Ug, совпадающее по фазе с Ц. напряжение U sinoHi блокируется в усилителе В и напряжение на его выходе действительно пропорционально только .. Таким,образом, принцип действия данной следящей системы с моментным двигателем заключается в следующем. На выходе приемника 2 дистанционной передачи формируется напряжение рассогласования Ц. Для работы моментного двигателя 7 в составе следя щей системы необходимо сформировать напряжения ( . Для этого напряжение U проходит через усилитель 8, модулятор 9, сумматор 3 и приемник 2, в результате чего на выходе приемника 2 формируются напря жения Ц sind24 } cosd2, которые и проходят через усилители 4 и 5, в которых выпрямляются и усиливаются. Напряжения же U/tu и U/f, на моментный двигатель 7 не поступают, так как он блокируются усилителями 4 и 5. Положительный эффект от использования предлагаемого texничecкoгo решения состоит в том, что при сохранении положительных свойств известной системы (постоянство момента дви гателя по углу поворота ротора при заданном входном сигнале) в предлагаемой системе обеспечивается повышение надежности за счет исключения синусно-косинусного вращающегося трансформатора. Наличие дополнительных элементов (усилителя, модулятора и сумматора) , которые выполняются на совремённой элементной базе, не усло няет систему. Если принять интенсивность отказов датчика, приемника и синусно-косинусного вращающегося трансформатора .xf Ю-Ю 1/Ч, усилителя JL « 0,6«10 1/Ч, источника опорного напряжения JL, 1,110- 1 /ч, моментного двигателя .4 , модулятора -5 0,6-КГ 1/Ч, сумматора Лб 0,310 1/Ч, то увидим, что интенсивность отказов известной системы Х-с изв Л- +А-4 ,3 , а предлагаемой системы - с пр 2 Л- ЗЬ + 4 + 4 ) 6 31,810 1/ч. Таким образом, надежность предлагаемой системы в 1,3 раза выше, чем известной. Формула изобретения Следящая система, содержащая датчик, первый выход которого Соединен с первым входом приемника, первый и второй фазочувствительные усилители, первые входы которых подключены к первому выходу источника опорного напряжения, а выходы которых подключены соответственно к первому и второму входам моментного двигателя, вал которого механически соединен с валом приемника, отличающаяся тем, что, с целью повышения надежности системы, в ней установлены сумматор и последовательно соединенные третий фазочувствительный усилитель и модулятор, второй вход которого соединен с первым выходом источника опорного напряжения, а выход с первым входом сумматора, второй вход которого соединен с вторым выходом датчика, а выход - с вторым входом приемника, первый выход которого подключен к второму входу первого фазочувствительного усилителя, а второй выход - к вторым входам второго и третьего фазочувствительных усилителей, первый вход третьего фазочувствительного усилителя подключен к второму выходу источника опорного напряжения. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР ff 5125 5, кл. И 02 К 29/02, 1976. 2.Столбов Л. И. и др. Моментные вигатели с постоянными магнитами. М., Энергия, 1977, с. 19 (прототип)..
930237
Фиг.1
