1
Изобретение относится к области автоматического регулирования и может быть использовано для управления объектами широкого профиля.
Целью изобретения является улучшение энергетических показателей системы.
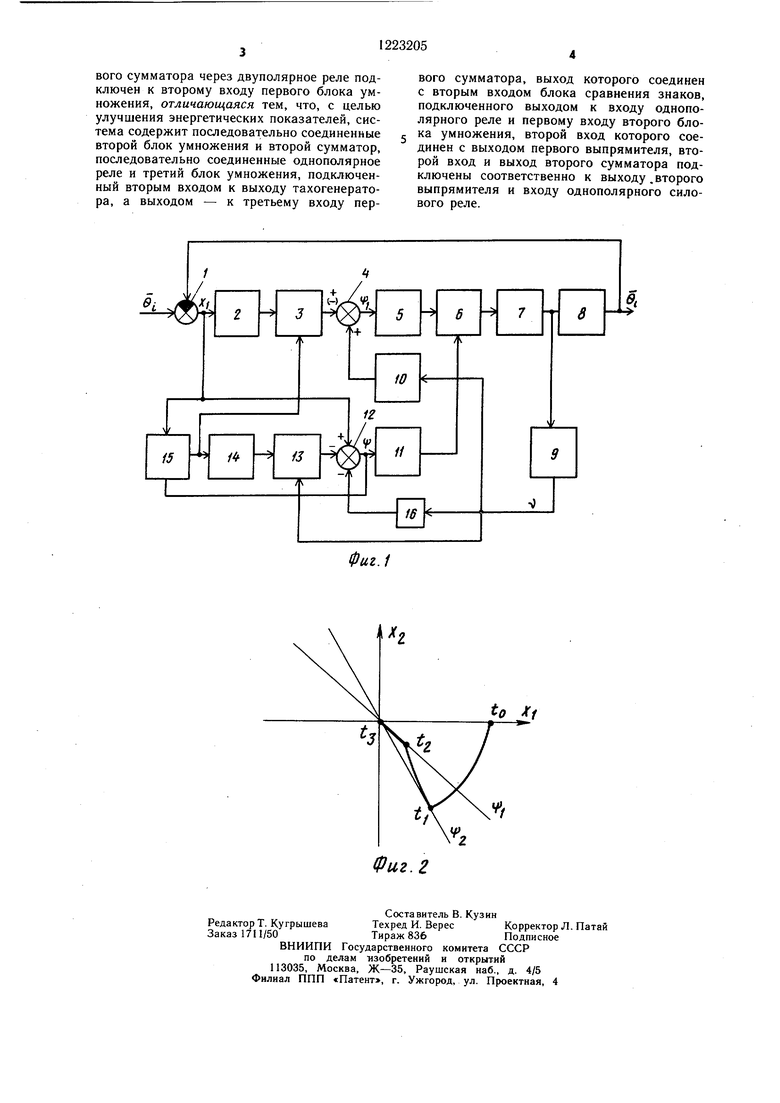
На фиг. 1 представлена структурная схема предлагаемой следяш,ей системы; на фиг. 2 - вид переходного процесса на фазовой плоскости.
Система содержит измеритель 1 рассогласования, первый выпрямитель 2, второй блок 3 умножения, второй сумматор 4, однопо- лярное силовое реле 5, первый блок 6 умножения, двигатель 7, редуктор 8, тахо- генератор 9, второй выпрямитель 10, дву- полярное реле 11, первый сумматор 12, третий блок 13 умножения, однополярное реле 14, блок 15 сравнения знаков и масштабирующий элемент 16 (в,- - входной сигнал, во - выходной сигнал, Xi - сигнал рассогласования, , F2 - первая и вторая управляющие функции, 9 - сигнал тахоге- нератора).
С целью исключения скользящих движений при сохранении апериодического переходного процесса и быстродействия в системе организуется следующее чередование движений: разгон - противовключение - динамическое торможение. Для организации предложенного алгоритма работы в системе реализуются следующие управляющие функции. В нереверсивном канале
г|)| ATiI signxi sign(x - i9) -f В реверсивном канале х - k - signTl;
{) при signX() 1 при signx() - 1 Система работает следующим образом. При подаче на вход сигнала задания Qi (момент to, фиг. 2) двигатель 7 начинает вращаться в требуемом направлении, так как знак направления вращения в первом сумматоре 12 определяется , т. е. f)Xi; sign х и sign 2 совпадают, на выходе блока 15 сравнения знаков присутствует «-|-1, которая при умножении во втором блоке 3 умножения обеспечивает прохождение модуля сигнала рассогласования kil на сумматор 4 без изменения знака, т. е. |3i |xi|. Включается силовое однополярное реле 5, которое через первый блок б умножения подключает напряжение питания к двигателю 7 со знаком sign 2 signx, определяемым двуполярным реле 11. Таким образом, в момент включения двигателя |)i Ui| и . Двигатель 7 начинает вращаться, отрабатывая сигнал задания, появляется выходной сигнал системы и сигнал тахогенератора 9, который через второй выпрямитель 10 подключается к второму входу первого сумматора 4, т. е. ф1 |.) и через масштабирующий элемент 16 с отрицательным знаком - к второму входу первого сумматора 12, т. е. i|)2
2232052
xi - fe|9. При наличии «1 на выходе блока 15 сравнения знаков на выходе однопо лярного реле 14 присутствует «О и CHrHaj. тахогенератора 9, подключенный к входу блока 13 умножения, не проходит на тре тий вход сумматора 12. Таким образом, управляющие функции на этапе разгона имеют вид |3i UiH-| | и x - k (интервал времени to-1|, фиг. 2). Такое состояние сохраняется до выполнения равенства
10 ф2 0, т. е. ki| :|fei.|, после чего происходит смена знака на выходе сумматора 12 . и двуполярного реле П. Двигатель 7 про- тивовключается (момент ti, фиг. 2), одновре- . менно меняется знак на выходе блока 15 сравнения знаков, sign Xi sign t z, а следо15 вательно, и знак на входе второго блока 3 умножения, т. е. знак, с которым происходит суммирование модуля сигнала ощибки во втором сумматоре 4. При этом 1)1 - |., однако Tj)i сохраняет прежний
2Q знак, так как выполняется условие |л:||. При изменении знака на выходе блока 15 сравнения знаков срабатывает одно- полярное реле 14, и на вход сумматора 12 с отрицательным знаком подключается выходной сигнал тахогенератора 9. В резуль25 тате управляющая функция принимает вид г|)2 л:1-(fei + 1), sign 2 sign), т. е. сохраняется знак противовключения, что гарантирует исключение скользящего режима (интервал време.ни t:-ta, фиг. 2). Движение противовключением сохраняется до вы30 полнения условия , т. е. R| Uil, иначе говоря до попадания изображающей точки на линию динамического торможения (момент времени t2 фиг. 2). Интервал времени t2-ts (фиг. 2) - режим динамического торможения двигателя, сигнал ошибки Xi умень35 шается до нуля.
Таким образом переходный процесс в предложенной системе происходит без перерегулирования при одном переключении 40 двуполярного реле 11, а изображающая точка попадает в начало координат при отключенном питании двигателя.
45
Формула изобретения
Релейная следящая система с. нелинейной коррекцией, содержащая измеритель рассогласования, первый выпрямитель, последовательно соединенные однополярное силовое реле, первый блок умножения, исполнительный двигатель и редуктор, выход которого связан с измерителем рассогласования, а вал исполнительного двигателя механически связан с тахогене ратором, выход которого подключен к входу второго вы- прямителя и через масштабирующий элемент - к первому входу первого сумматора, второй вход.которого соединен с выходом измерителя рассогласования и с первым входом блока сравнения знаков, выход первого сумматора через двуполярное реле подключен к второму входу первого блока умножения, отличающаяся тем, что, с целью улучшения энергетических показателей, система содержит последовательно соединенные второй блок умножения и второй сумматор, последовательно соединенные однополярное реле и третий блок умножения, подключенный вторым входом к выходу тахогенерато- ра, а выходом - к третьему входу первого сумматора, выход которого соединен с вторым входом блока сравнения знаков, подключенного выходом к входу однопо- лярного реле и первому входу второго бло- ка умножения, второй вход которого соединен с выходом первого выпрямителя, второй вход и выход второго сумматора подключены соответственно к выходу . второго выпрямителя и входу однополярного силового реле.
Фиг.1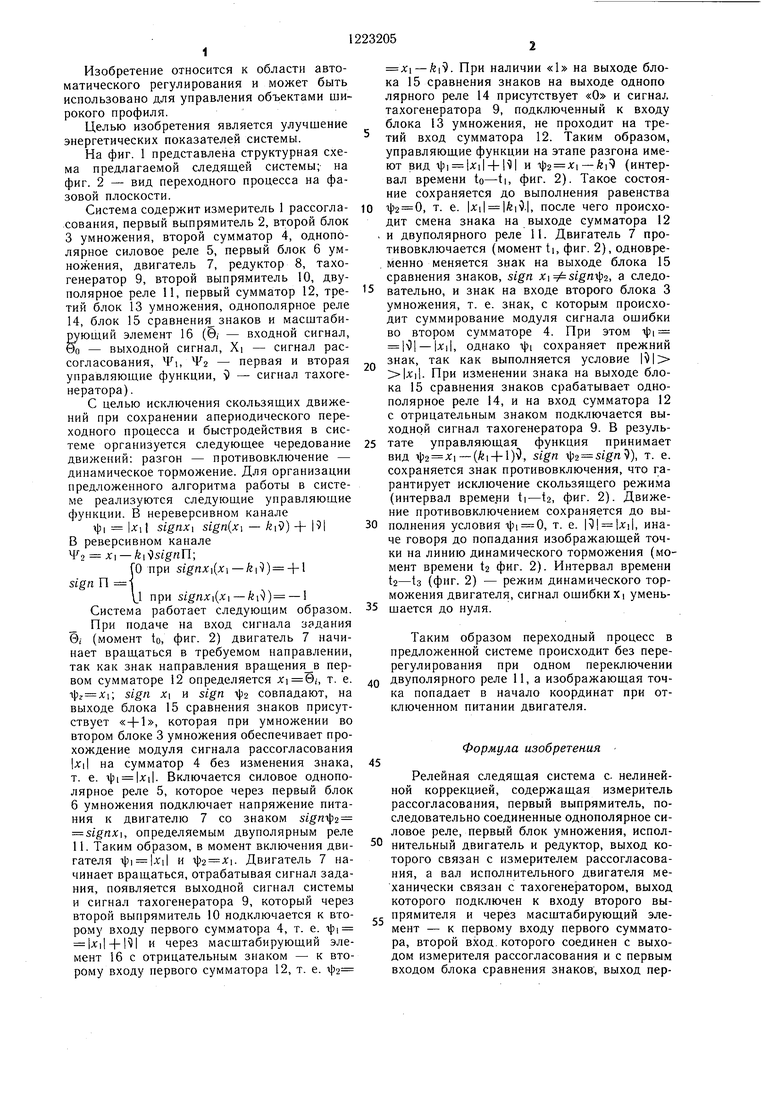
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейная следящая система | 1986 |
|
SU1399696A1 |
| Релейная следящая система с нелинейной коррекцией | 1985 |
|
SU1312523A1 |
| Следящая система | 1981 |
|
SU968783A2 |
| Бесконтактный следящий привод постоян-НОгО TOKA | 1979 |
|
SU853606A1 |
| Реверсивный бесконтактный тахогенератор для следящих систем | 1979 |
|
SU788000A1 |
| Бесконтактный следящий привод постоянного тока,оптимальной по быстродействию | 1973 |
|
SU459761A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU525921A1 |
| Бесконтактная следящая система постоянного тока | 1979 |
|
SU930238A2 |
| Следящая система | 1979 |
|
SU788076A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU474787A1 |
Изобретение относится к автоматическому регулированию и может быть использовано для управления различными объектами. Оно позволяет улучшить энергетические показатели релейной следящей системы за счет введения второго и третьего блоков умножения, второго сумматора и однопо- лярного реле, так как при этом организуется следующее чередование движений: разгон - противовключение - динамическое торможение. 2 ил. ю ю со N3
to Xi
Составитель В. Кузин
Редактор Т. КугрышеваТехред И. ВересКорректор Л. Па тай
Заказ 1711/50Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
Фиг. г
| Хлыпало Е | |||
| И | |||
| Нелинейные корректирующие устройства в автоматических системах | |||
| Энергия, 1973, с | |||
| Вагонетка для движения по одной колее в обоих направлениях | 1920 |
|
SU179A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Цыпкин Я | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Релейные автоматические системы | |||
| Наука, 1974, с | |||
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
