(5) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДИСКРЕТНЫМ ПРИВОДОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь кодов | 1978 |
|
SU744548A1 |
| Цифровой гидравлический привод | 1978 |
|
SU748042A1 |
| Устройство для цифровой фильтрации | 1985 |
|
SU1381541A1 |
| Двухтактный аналого-цифровой преобразователь | 1985 |
|
SU1336236A1 |
| Цифровой синтезатор частот | 1978 |
|
SU813675A1 |
| Аналого-цифровой преобразователь | 1985 |
|
SU1336237A1 |
| Устройство для вычисления элементарных функций | 1984 |
|
SU1168930A1 |
| УСТРОЙСТВО ПОИСКА ИНФОРМАЦИИ | 2010 |
|
RU2444781C1 |
| Умножитель | 1984 |
|
SU1171784A1 |
| Формирователь последовательностей радиоимпульсов | 1981 |
|
SU1030961A1 |
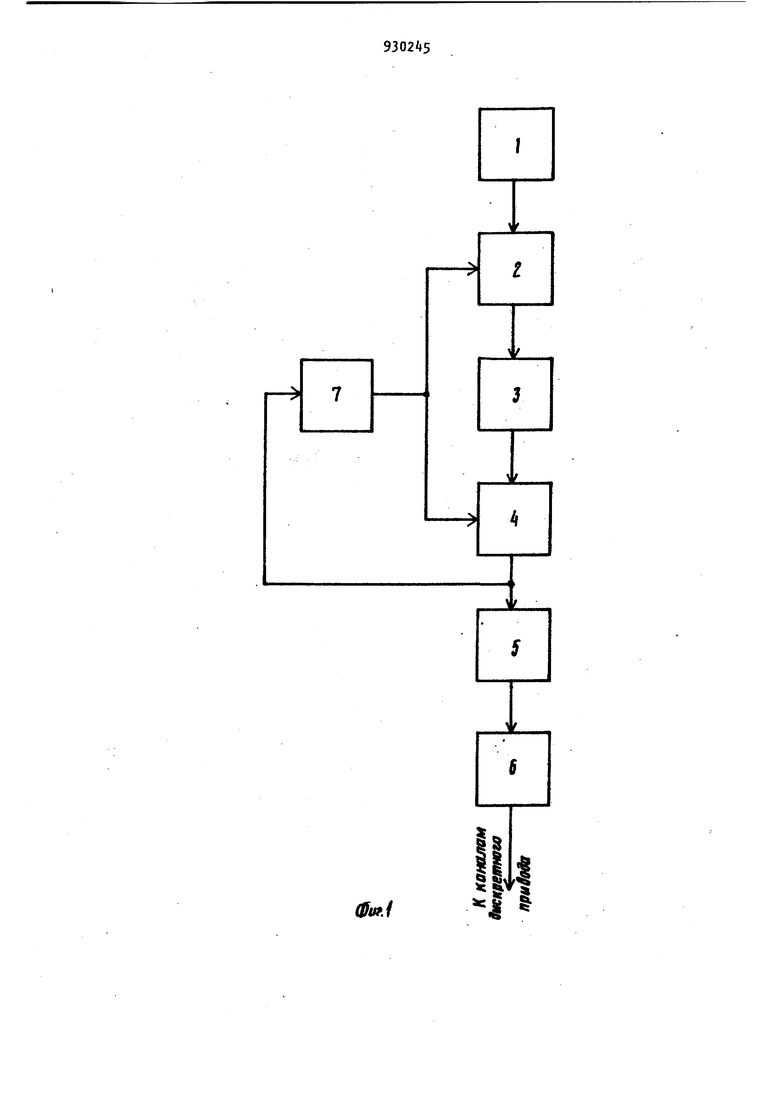
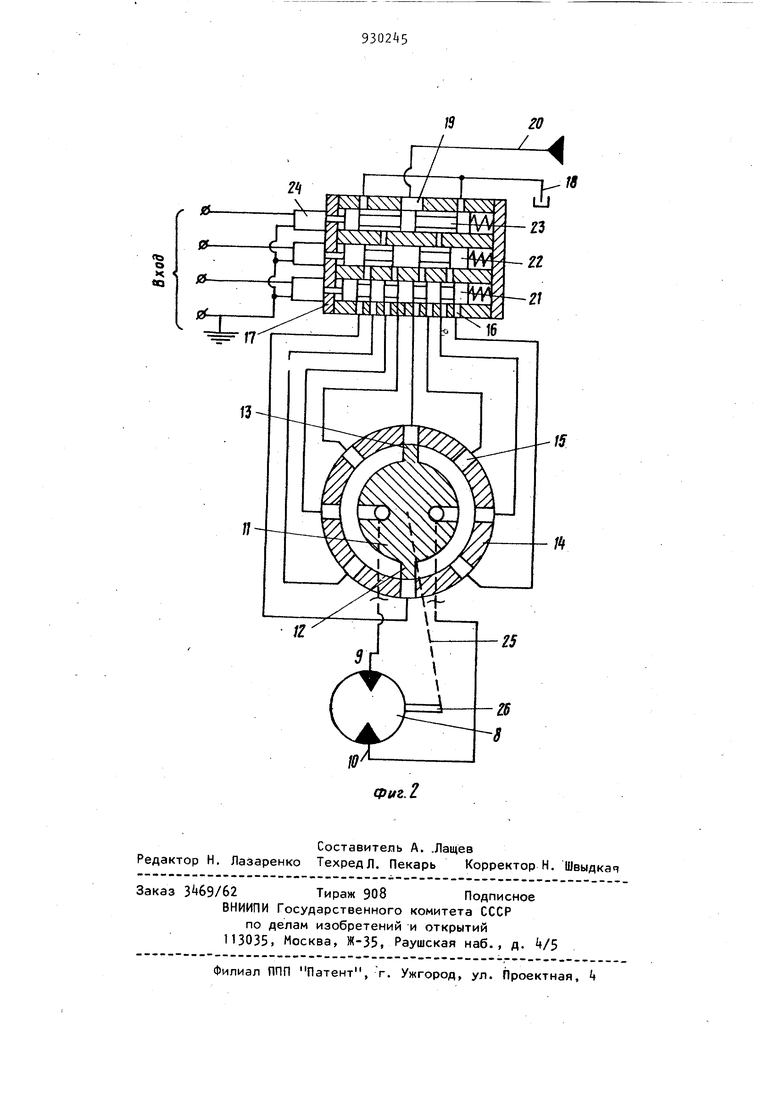
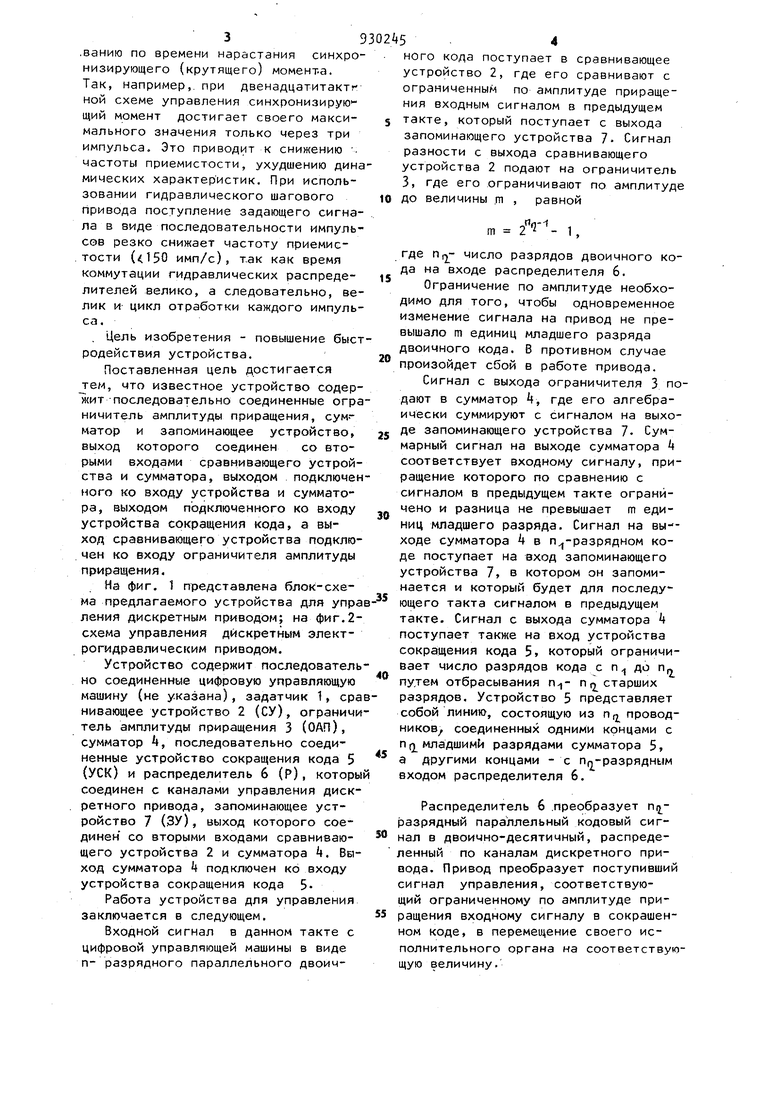
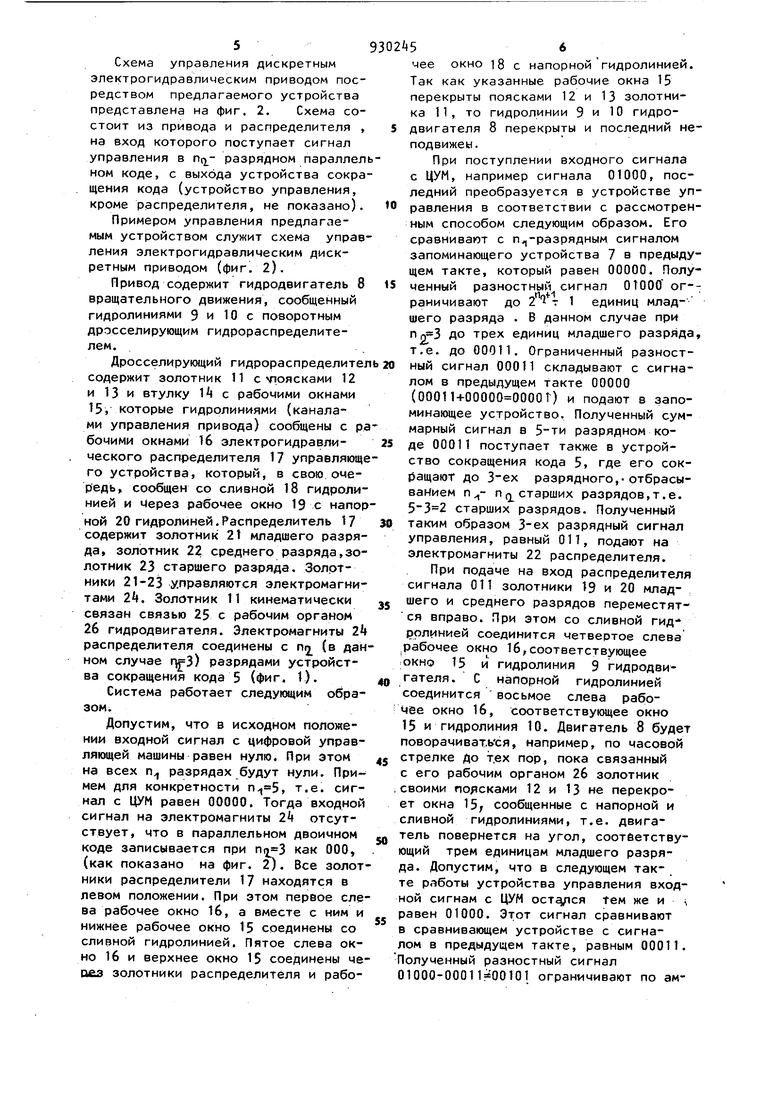
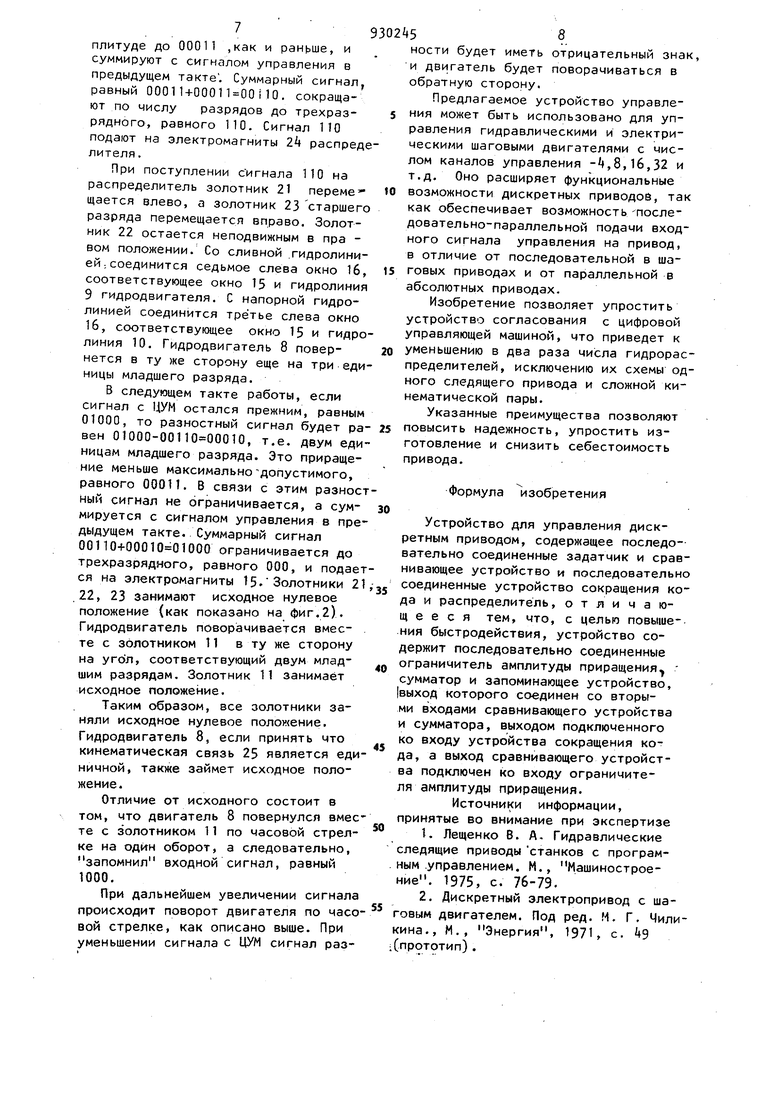
Изобретение относится к автоматическому управлению и может быть использовано в системах цифрового упра ления. Известно устройство управления дискретным абсолютным приводом в двоичном коде, содержащее последовательно соединенные цифровую управляющую машину (ЦУМ) и распределитель в котором двоичный код преобразуется в двоично-десятичный кодовый сигнал, распределенный по каналам привода. В приводе кодовый сигнал преобразуют в аналоговый в виде перемещения рабочего органа. Задающий сигнал на привод поступает в параллельном коде что исключает задержку по времениfij Недостатком этого устройства является ограниченная точность, обус ловленная максимально допустимым чис лом разрядов привода. Уже при разрядах (128-256) дискретных положений привода) распределитель стано-j вится громоздким и ненадежным, так как золотник младшего разряда имеет 128-256 поясков. При 10-И разрядах управления приходится переходить к борее сложному двухотсчетному приводу. Кроме того, при большом числе разрядов требуется много каналов управления приводом, что также является су1цественным недостатком. Наиболее близким по технической сущности к предлагаемому является устройство для управления дискретным приводом, содержащее последовательно соединенные задатчик и сравнивающее устройство и последовательно соединенные устройство сокращения кода и распределитель Г21. Однако известное устройство для управления отличается недостаточно быстрой передачей и преобразованием задающего сигнала. Этот недостаток обусловлен тем, что задающий сигнал на привод поступает последовательно .(импульс,за импульсом), что приводит к значительному запаздЫ .ванию по времени нарастания синхронизирующего (крутящего) момента. Так, например,, при двенадцатитактг ной схеме управления синхронизирую щий момент достигает своего максимального значения только через три импульса. Это приводит к снижению . частоты приемистости, ухудшению дина мических характеристик. При использовании гидравлического шагового Привода поступление задающего сигнала в виде последовательности импульсэв резко снижает частоту приемистости (150 имп/с), так как время коммутации гидравлических распределителей велико, а следовательно, велик и цикл отработки каждого импульса. Цель изобретения - повышение быст родействия устройства. Поставленная цель достигается тем, что известное устройство содер1 ит последовательно соединенные огра ничитель амплитуды приращения, сумматор и запоминающее устройство, выход которого соединен со вторыми входами сравнивающего устройства и сумматора, выходом подключен ного ко входу устройства и сумматора, выходом подключенного ко входу устройства сокращения кода, а выход сравнивающего устройства подклга. чен ко входу ограничителя амплитуды приращения. На фиг, 1 предстаалена блок-схема предлагаемого устройства для упра ления дискретным приводом; на фиг.2схема управления дискретным электрогидравлическим приводом. Устройство содержит последователь но соединенные цифровую управляющую машину (не указана), задатчик 1, сра нивающее устройство 2 (СУ), ограничи тель амплитуды приращения 3 (ОАП), сумматор 4, последовательно соединенные устройство сокращения кода 5 (УСК) и распределитель 6 (Р), которы соединен с каналами управления дискретного привода, запоминающее устройство 7 (ЗУ), выход которого соединен со вторыми входами сравнивающего устройства 2 и сумматора 4. Beiход сумматора k подключен ко входу устройства сокращения кода 5Работа устройства для управления заключается в следующем. Входной сигнал в данном такте с цифровой управляющей машины в виде п- разрядного параллельного двоичного кода поступает в сравнивающее устройство 2, где его сравнивают с ограниченным по амплитуде приращения входным сигналом в предыдущем такте, который поступает с выхода запоминающего устройства 7. Сигнал разности с выхода сравнивающего устройства 2 подают на ограничитель 3, где его ограничивают по амплитуде до величины m , равной где nrjr число разрядов двоичного кода на входе распределителя 6. Ограничение по амплитуде необходимо для того, чтобы одновременное изменение сигнала на привод не превышало m единиц младшего разряда двоичного кода. В противном случае произойдет сбой в работе привода. Сигнал с выхода ограничителя 3 подают в сумматор , где его алгебраически суммируют с сигналом на выходе запоминающего устройства 7- Суммарный сигнал на выходе сумматора 4 соответствует входному сигналу, приращение которого по сравнению с сигналом в предыдущем такте ограничено и разница не превышает m единиц младшего разряда. Сигнал на вы-ходе сумматора 4 в п -разрядном коде поступает на вход запоминающего устройства 7, в котором он запоминается и который будет для последующего такта сигналом в предыдущем такте. Сигнал с выхода сумматора 4 поступает также на вход устройства сокращения кода 5 который ограничивает число разрядов кода с п до п путем отбрасывания п,- п,2 старших разрядов. Устройство 5 представляет собой линию, состоящую из HQ проводников соединенных одними концами с п 0 младшими разрядами сумматора 5, а другими концами - с Пп-разрядным входом распределителя 6. Распределитель 6 .преобразует nij |эазрядный параллельный кодовый сигнал в двоично-десятичный, распределенный по каналам дискретного привода. Привод преобразует поступивший сигнал управления, соответствующий ограниченному по амплитуде приращения входному сигналу в сокрашенном коде, в перемещение своего исполнительного органа на соответствующую величину. Схема управления дискретным электрогидравлическим приводом посредством предлагаемого устройства представлена на фиг. 2. Схема состоит из привода и распределителя , на вход которого поступает сигнал управления в разрядном параллель ном коде, с выхода устройства сокращения кода (устройство управления, кроме распределителя, не показано). Примером управления предлагаемым устройством служит схема управления электрогидравлическим дискретным приводом (фиг. 2). Привод содержит гидродвигатель 8 вращательного движения, сообщенный гидролиииями 9 и 10 с поворотным дросселирующим гидрораспределителем. Дросселирующий гидрораспределител содержит золотник П с поясками 12 и 13 и втулку Il с рабочими окнами 15 которые гидролиниями (каналами управления привода) сообщены с ра бочими окнами 16 электрогидравлического распределителя 17 управляюще го устройства, который, в свою очередь, сообщен со сливной 18 гидролинией и Через рабочее окно 19 с напор ной 20 гидролиней.Распределитель 1 содержит золотник 21 младшего разряда, золотник 22 среднего разряда,золотник 23 старшего разряда. Золртники 21-23 управляются электромагнитами 2k. Золдтник 11 кинематически связан связью 25 с рабочим органом 26 гидродвигателя. Электромагниты 2 распределителя соединены с nij (в дан ном случае ) разрядами устройства сокращения кода 5 (фиг. 1). Система работает следующим образом. Допустим, что в исходном положении входной сигнал с цифровой управляющей машины равен нулю. При этом на всех п разрядах будут нули. Примем для конкретности п,5, т.е. сигнал с ЦУМ равен 00000. Тогда входной сигнал на электромагниты 2k отсутствует, что в параллельном двоичном коде записывается при П(3 как 000, (как показано на фиг. 2. Все золот ники распределители 17 находятся в левом положении. При этом первое сле ва рабочее окно 16, а вместе с ним и нижнее рабочее окно 15 соединены со сливной гидролинией. Пятое слева окно 16 и верхнее окно 15 соединены че о&з золотники распределителя и рабочее окно 18 с напорной гидролинией. Так как указанные рабочие окна 15 перекрыты поясками 12 и 13 золотника 11, то гидролинии 9 и 10 гидродвигателя 8 перекрыты и последний неподвижен. При поступлении входного сигнала с ЦУМ, например сигнала 01000, последний преобразуется в устройстве управления в соответствии с рассмотренным способом следующим образом. Его сравнивают с п -разрядным сигналом запоминающего устройства 7 в предыдущем такте, который равен 00000. Полученный разностный сигнал ОТООО oiраничивают до 1 единиц младшего разряда . В данном случае при до трех единиц младшего разряда, т.е. до 00011. Ограниченный разностный сигнал 00011 складывают с сигналом в предыдущем Такте 00000 (00011+00000 0000t) и подают в запоминающее устройство. Полученный суммарный сигнал в 5-ти разрядном коде 00011 поступает также в устройство сокращения кода 5, где его сокращают до разрядного,- отбрасыванием Подстарших разрядов,т.е. старших разрядов. Полученный таким образом 3-ех разрядный сигнал управления, равный 011, подают на электромагниты 22 распределителя. При подаче на вход распределителя сигнала 011 золотники 19 и 20 младшего и среднего разрядов переместятся вправо. При этом со сливной гидррлинией соединится четвертое слева рабочее окно 16,соответствующее окно 15 и гидролиния 9 гидродвигателя. С напорной гидролинией соединится восьмое слева рабоее окно 16, соответствующее окно 15 и гидролиния 10. Двигатель 8 будет оворачиваться, например, по часовой трелке До т,ех пор, пока связанный его рабочим органом 26 золотник воими поясками 12 и 13 не перекрот окна 15; сообщенные с напорной и ливной гидролиниями, т.е. двигаель повернется на угол, соответствущий трем единицам младшего разряа. Допустим, что в следующем таке работы устройства управления входой сигнам с ЦУМ тем же и авен 01000. Этот сигнал сравнивают сравнивающем устройстве с сигнаом в предыдущем такте, равным 00011. олученный разностный сигнал 1000-000111 00101 ограничивают по амплитуде до 00011 ,как и ран(эше, и суммируют с сигналом управления в предыдущем такте . Суммарный сигнал, равный 00011+00011 00i10, сокращают по числу разрядов до трехразрядного, равного 110. Сигнал ПО подают на электромагниты 2k распреде лителя. При поступлении сигнала 110 на распределитель золотник 21 переме щается влево, а золотник 23 старшего разряда перемещается вправо. Золотник 22 остается неподвижным в пра вом положении. Со сливной .гидролинией-, соединится седьмое слева окно 16, соответствующее окно 15 и гидролиния 9 гидродвигателя. С напорной гидролинией соединится третье слева окно 16, соответствующее окно 15 и гидро линия 10. Гидродвигатель 8 повернется в ту же сторону еще на три еди ницы младшего разряда. В следующем такте работы, если сигнал с ЦУМ остался прежним, равным 0100О, то разностный сигнал будет ра вен 01000-00110 00010, т.е. двум еди ницам младшего разряда. Это приращение меньше максимально допустимого, равного 00011. В связи с этим разност ный сигнал не ограничивается, а суммируется с сигналом управления в предыдущем такте. Суммарный сигнал 00110+00010 01000 ограничивается до трехразрядного, равного 000, и подает ся на электромагниты 15-Золотники 2 22, 23 занимают исходное нулевое положение (как показано на фиг.2). Гидродвигатель поворачивается вместе с золотником 11 в ту же сторону на угол, соответствующий двум младшим разрядам. Золотник 11 занимает исходное положение. Таким образом, все золотники заняли исходное нулевое положение. Гидродвигатель 8, если принять что кинематическая связь 25 является еди ничной, также займет исходное положение . Отличие от исходного состоит в том, что двигатель 8 повернулся вмес те с золотником 11 по часовой стрелке на одкн оборот, а следовательно, запомнил входной сигнал, равный 1000. При дальнейшем увеличении сигнала происходит поворот двигателя по час вой стрелке, как описано выше. При уменьшении сигнала с ЦУМ сигнал раз95б ности будет иметь отрицательный знак, и двигатель будет поворачиваться в обратную сторону. Предлагаемое устройство управления может быть использовано для управления гидравлическими и электрическими шаговыми двигателями с числом каналов управления -j,8,16,32 и т.д. Оно расширяет функциональные возможности дискретных приводов, так как обеспечивает возможность-последовательно-параллельной подачи входного сигнала управления на привод, в отличие от последовательной в шаговых приводах и от параллельной в абсолютных приводах. Изобретение позволяет упростить устройство согласования с цифровой управляющей машиной, что приведет к уменьшению в два раза числа гидрораспределителей, исключению их схемы одного следящего привода и сложной кинематической пары. Указанные преимущества позволяют повысить надежность, упростить изготовление и снизить себестоимость привода. Формула изобретения Устройство для управления дискретным приводом, содержащее последовательно соединенные задатчик и сравнивающее устройство и последовательно соединенные устройство сокращения кода и распределитель, о т л и ч а ющ е е с я тем, что, с целью повышения быстродействия, устройство содержит последовательно соединенные ограничитель амплитуды приращения, сумматор и запоминающее устройство, выход которого соединен со вторыми входами сравнивающего устройства и сумматора, выходом подключенного ко входу устройства сокращения кода, а выход сравнивающего устройства подключен ко входу ограничителя амплитуды приращения. Источники информации, принятые во внимание при экспертизе 1.Лещенко В. А- Гидравлические следящие приводы станков с програмным .управлением. М., Машиностроение. 1975, с, 76-73. 2.Дискретный электропривод с шаговым двигателем. Под ред. М. Г. Чиликина,, М., Энергия, 1971, с. Э (прототип).
ё
Ф.
