I
Изобретение относится к грузоI подъемным устройствам, в частности, к грузозахватам изделий, имеющих цилиндрические такелажные отверстия.
Известен захват, содержащий навешиваемый на грузоподъемный механизм несущий элемент и запирающий
Недостаток известного з-ахвата в том, что он имеет низкую надежность в работе.
Цель изобретения - повышение надежности работы захвата.
Эта цель достигается тем, что несущий элемент связан с грузоподъемным механизмом посредством каната и представляет собой цилиндрический наконечник, жестко закрепленный на канате, а внутренняя поверхность запирающего клина выполнена вогнутой двухступенчатой, причем радиус верхней ступени равен радиусу каната, а радиус нижней ступени - радиусу наконечника.
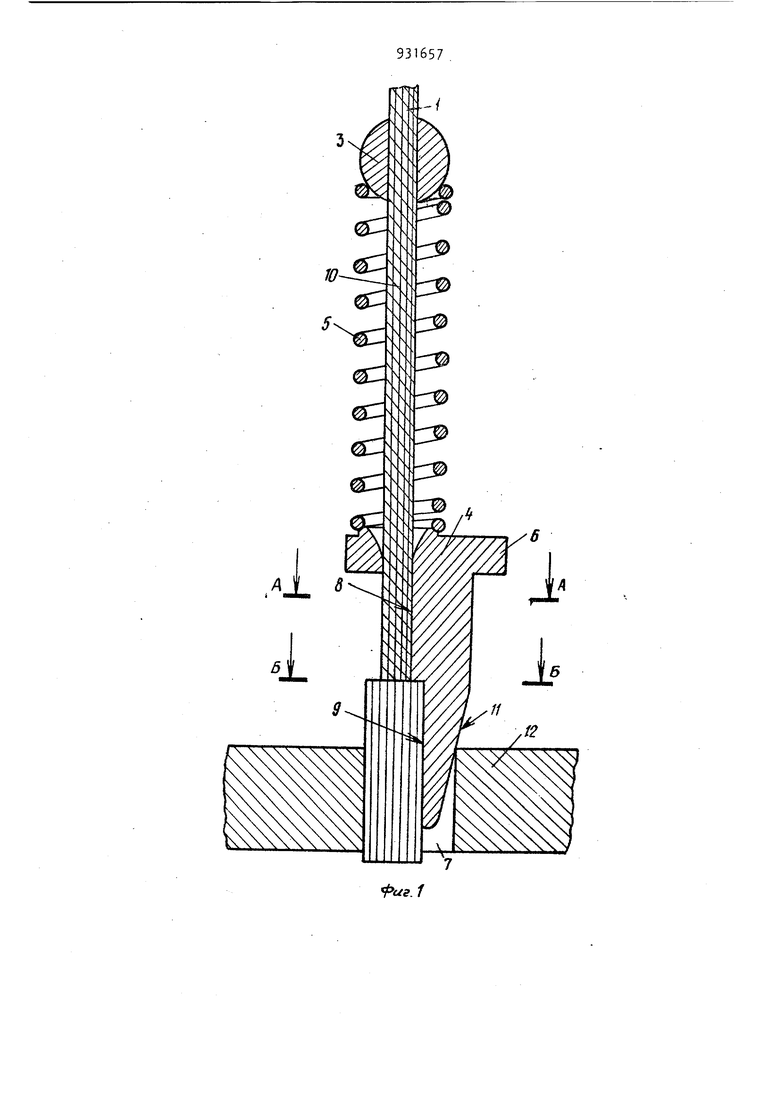
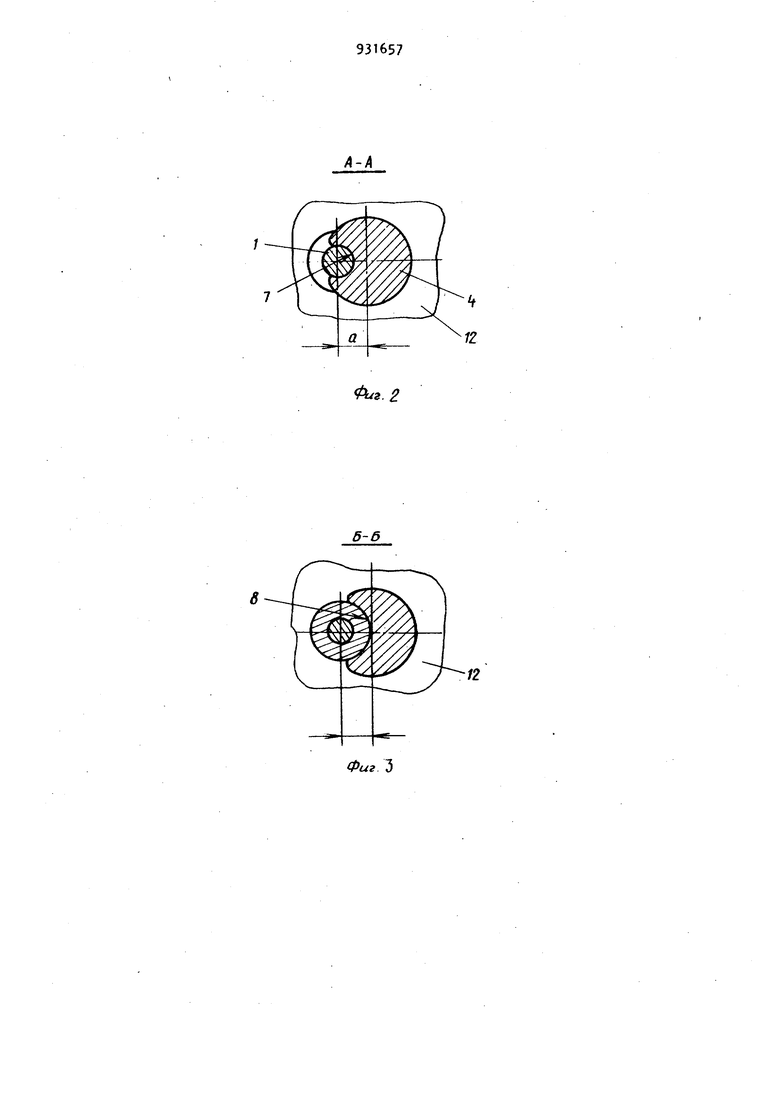
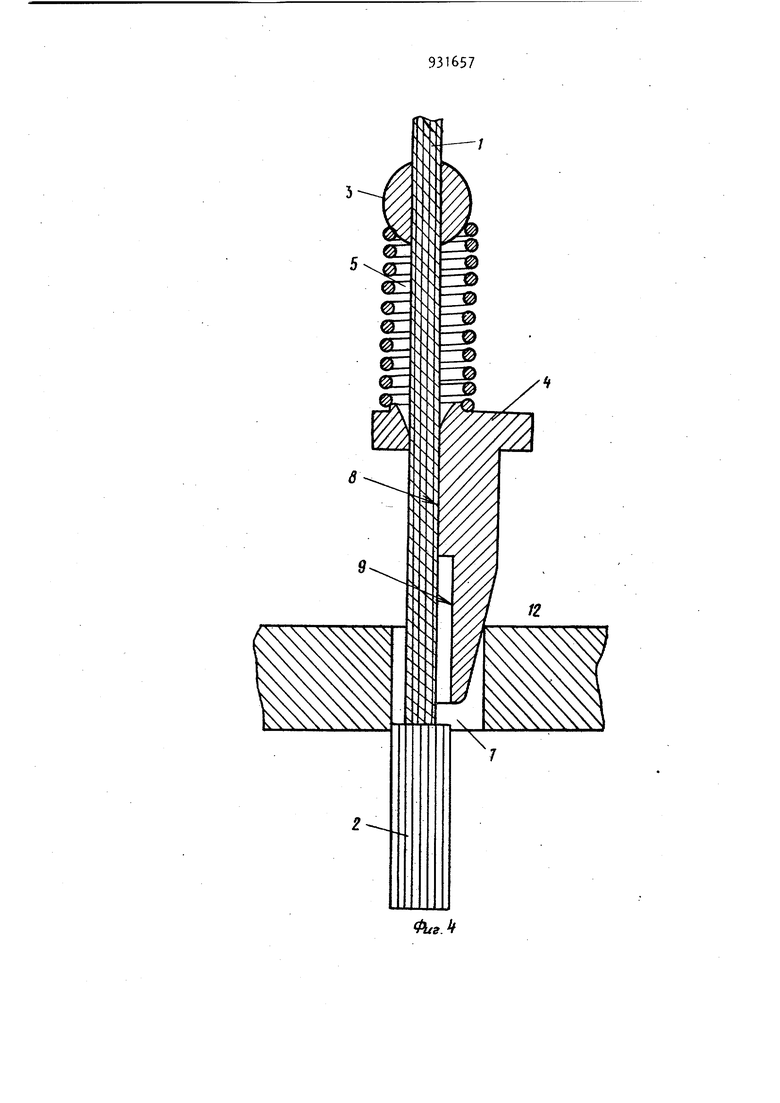
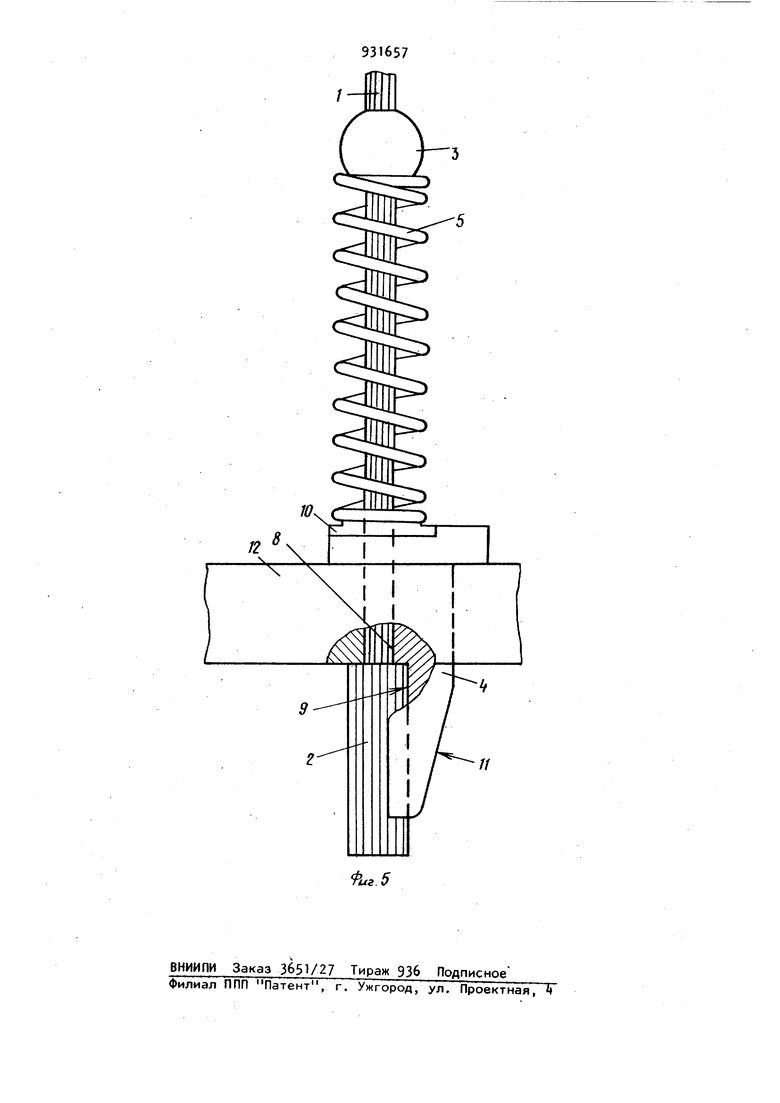
На фиг. 1 изображен захват, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. Ц- соединение захвата с грузом; на фиг. 5 - закрытое положение захвата на грузе.
Захват содержит канат 1 с обжатыми наконечниками - цилиндрическим 2 и шаровым 3 и подвижно установленный на канате 1 между этими наконечниками
0 запирающий выпукло-вогнутый клин , подпружиненный в сторону наконечника 2 пружиной 5. Клин k снабжен упорами 6, а выпуклая поверхность его выполнена радиусом, равным радиусу таке15лажного отверстия 7, верхняя часть вогнутой опорной поверхности 8 образована радиусом, равным радиусу каната 1 и высотой, равной высоте такелажного отверстия, а нижняя часть
20 вогнутой опорной поверхности 9 радиусом, равным радиусу наконечника 2, приуем расстояние а меЛду осью клина и осями обеих поверхностей 8 и
9 равно разности радиусов отверстия 7 и каната 1. На боковых стенках клина J имеются выступы VO для открытия захвата, а со стороны, противоположной поверхностям 8 и 9 снабжен скосом 11.
Для соединения захвата с цилиндри ческим отверстием 7 необходимо ввести наконечник 2 каната 1 и клин в отверстие7 до упора скоса 11 в корпус 12. При приложении нагрузки вниз к шаровому наконечнику 3 наконечник 2 пройдет через отверстие 7, после чего под действием пружины 5 клин войдет в отверстие 7 и своей поверхностью 8 переместит канат 1 к краю оверстия 7. При подъеме груза за часть наконечника 2, перекрывающая тело корпуса 12, воспринимает полезную нагрузку, а поверхность 9 клина k предотвращает перекос наконечника 2 и исключает излом каната 1.
Для снятия захвата с груза необходимо приложить вверх нагрузку к выступам 10 клина k и извлечь его из отверстия 7 после нажать его в сторону каната 1. Цилиндрический наконечник 2 выйдет из зацепления с корпусом 12 и под действием пружины 5 выйдет из корпуса 12.
Внедрение предлагаемого захвата позволит упростить зацепление с такелажными отверстиями груза, сократить потребные трудозатраты и исключить возможность потери или падений элементов зацепления.
Формула изобретения
Захват для изделий с отверстием содержащий навешиваемый на грузоподъемный механизм несущий элемент , и запирающий клин, отличающийся тем, что, с целью повышения надежности работы захвата, несущий элемент связан с грузоподъемным механизмом посредством каната и представляет собой цилиндрический наконечник, жестко закрепленный на канате, а внутрення поверхность запирающего клина выполнена вогнутой двухступенчатой, причем радиус верхней ступени равен радиусу -каната, а радиус нижней ступени - радиусу наконечника.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 29005, кл. В 66 С /kk, 1933 (прототип).
Фи.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Крюк | 1979 |
|
SU925837A1 |
| Захватное устройство для пакета группы длинномерных грузов | 1985 |
|
SU1414749A1 |
| Устройство для проводки высоких сооружений на судне под линией электропередачи | 1982 |
|
SU1082678A1 |
| СТРОПОВЫЙ ПОДВЕС | 2012 |
|
RU2520681C1 |
| Грузовой строп для грузов с цапфами | 1984 |
|
SU1188076A1 |
| Грузозахватное устройство | 1988 |
|
SU1652277A1 |
| СПОСОБ МНОГОСЛОЙНОЙ НАВИВКИ КАНАТА НА БАРАБАН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2205148C2 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА МАЯТНИКОВОГО ТИПА | 1966 |
|
SU184285A1 |
| Траверса модульная | 2017 |
|
RU2653911C1 |
| Такелажный замок с дистанционным управлением | 1983 |
|
SU1204844A1 |