(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ОПТИЧЕСКОЙ КАРЕТКИ В ИНТЕРФЕРОМЕТРЕ
I
Изобретение относится к оптическому приборостроению и может найти применение в Фурье-спектрометрах, фазометрах и других оптических приборах.
Одно из известных устройств для управления -движением оптической каретки в интерферометре содержит направляющую и механизм перемещения каретки 1 j .
Наиболее близким к предлагаемому является устройство для управления движением оптической каретки в интерферометре, содержащее направляющую и механизм перемещения каретки с ведущим узлом t2j ..
Недостатком известного устройства является наличие неконтролируемой погрешности измерений, зависящей от времени и координат и обусловленной износом тросика за счет сдвигающего усилия и люфтующим перекосом при движении каретки и связанного с ней зеркала. Указанные факторы существенно ограничивают точность измерения и надежность устройства.
Цель изобретения - повышение точности измерений при одновременном уве личении надежности.
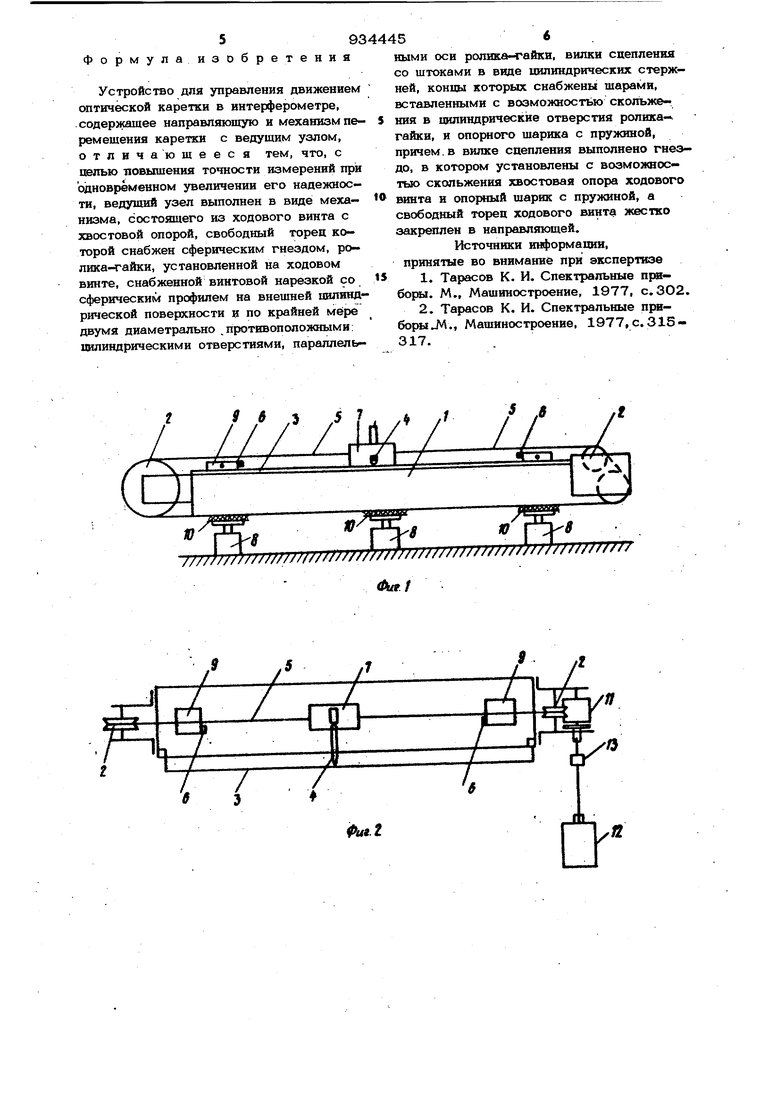
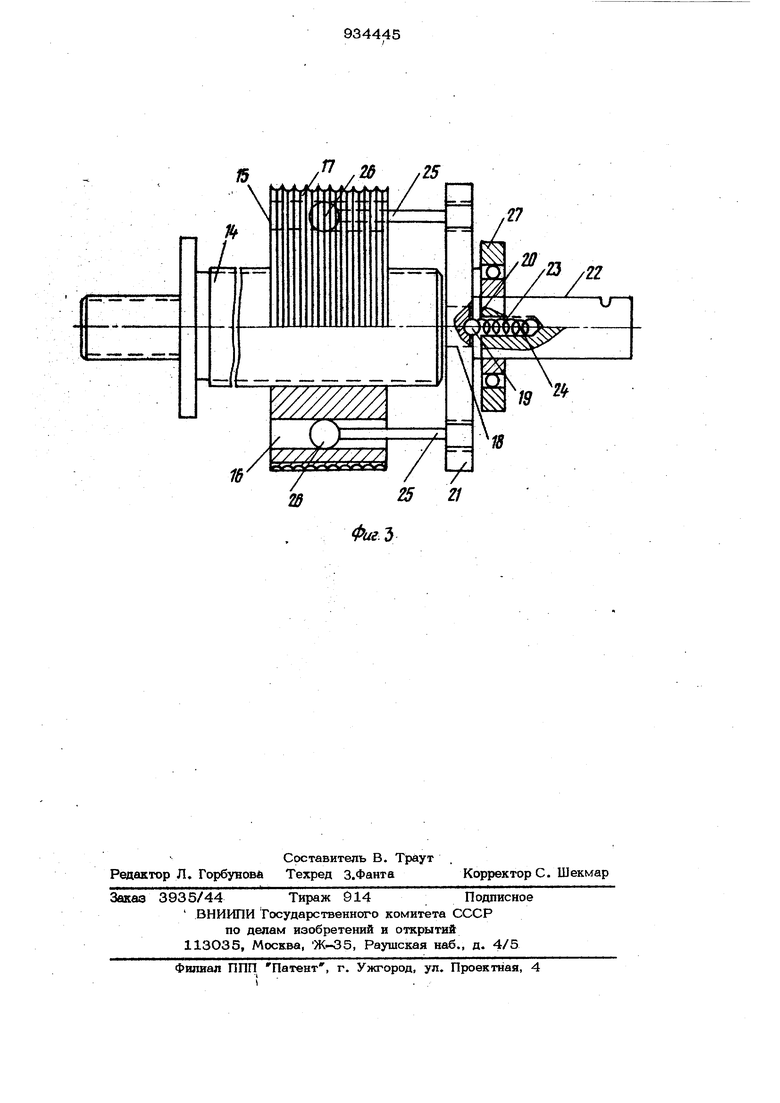
Для достижения указанной цели в известном устройстве для управления движением оптической каретки в интерферометре, содержащем направляющую и механизм перемещения каретки с ведущим узлом, ведущий узел вьтолнен в ввде механизма, состоящего из ходового винта с хвостовой опорой, свободный торец которой снабжен сферическим гнездом, ролнка- айки, установленной на ходовом винте, снабженной винтовой нарезкой со сферическим профилем на внешней цилиндрической поверхности и по крайней мере двумя диаметрально противоположными цилиндрическими отверстиями, параллельными оси ролика- айки, вилки сцепления со щтоками в виде цилиндрических стержней, концы которых снабжены шарами, вставленными с возможностью скольже- шш в цилиндрические отверстия ролика- , гайки, и опорного щарика с пружиной причем в вилке сцепления выполнено шеадо, в котором установлены с возможностью скольжения хвостовая опора ходового винта и опорный шарик с пружиной, а свободный торец ходового вин- та жестко закреплен в направляющей. На фиг, 1 и 2 показан механизм перемещения каретки; на фиг. 3 -. ведущий узел. Устройство содержит направляющую 1 со скопьз$вдей поверхностью треугольного профиля, ведомые ролики 2, реохорд 3, токосъемник 4, тросик 5, концевые выключатели 6, каретку 7, домкраты 8, ограничители 9 движения, амортизаторы 10, ведущий узел 11, электродвигатель 12, переходные муфты 13.. Ведущий узел 11 состоит из ходового винта 14, В ролике-гайке 15 выполнены по крайней мере два диаметрально противоположных цилиндрических отверстия 16 параллельных оси гайки, а на внешней ци линдрической поверхности ролика-гайки 15 выполнена винтовая нарезка 17 со сферическим профилем. Ходовой винт 14 с одного конца имеет резьбовую нарезку, с другого - хвостовую опору 18. В хвостовой опоре 18 вьшолнено сферическое гнез до 19, в которое установлен опорный шарик 20. Посредством резьбовой нарезки ходовой винт 14 жестко закреплен в направляющей 1, Ведущий узел содержит также вилку 2 сцепления с осью 22 с фланцем, причем в сцепления выполнено гнездо 23, в которое установлены с возможностью, скольжения хвостовая опора 18 ходового винта 14 и пружина 24, поджимающая опорный шарик 20. Штоки 25 в ввде цилиндрических стержней, концы которых снабжены шарами 20, жестко закреплены во фланце оси 22. Ось 22 установлена в подшипнике 27. На направляющей 1 расположены ограничители 9 , к которым прикреплены концевые выключатели 6. Ограничители 9 движения имеют возможность скольжения по направляющей 1, при этом они снабжены стопорами. Ведомый ролик 2 и ведущий узел 11 закреплены на торцах направляющей 1, На направляющей 1 расположена карет ка 7, к которой жестко прикреплены концы тросика 5, проходЯ1цего в пазах винтовой нарезки 17 со сферическим профилем и ведомых роликов 2. Ось 2 2 вил ки 21 сцепления через муфту 13 свяэака с валом двигателя 12. Один из ведомых роликов 2 выполнен с диаметром, равным толщине направляющей 1 плюс два-три сантиметра. В этом случае края ролика 2 выступают над и под направляющей 1 на высоту, равную примерно 1 см + О,5 мм. Устройство для управления движением оптической каретки работает следующим образом. Вращение от электродвигателя 12 передается посредством двух муфт 13 на вилку 21 сцепления. При вращении вилка 21 сцепления посредством штоков 25 с шарами 26 передает движение роликугайке 15, который, вращаясь, тянет тросик 5, а через него каретку 7. На каретке 7 размещено еркало интерферометра. С токосъемника 4, скользящего по реохорду 3, снимается опорный сигнал, который подается в соответствующий блок, например, на координату X двухкоординатного самописца. Управление кареткой 7 осуществляется посредством коммутирующего переключателя (не показан) и концевых выключателей 6. Для уменьшения искривления по оси направЛ5по1цая 1 установлена через амортизаторы 1О на домкратах 8. При этом направляющая 1 и основания домкратов 8 не имеют прямого (гальванического) контакта. Домкраты 8 позволяют выравнять направляющую 1 с высокой точностыо. Выравнивание осуществляется в следующем порядке. На зеркало, установленное на каретке 7 параллельно оси направляющей 1, направляют через диафрагму коплимированный пучок света от лазера. Отраженный от зеркала пучок света совмещают с осью диафрагмы. Совмещение отражещ1ого пучка света осуществляют непрерьюно при перемещении каретки 7 по направляющей 1. Центрирование отраженного пучка по оси диафрагмы производят домкратами. Выравнивание направляющей 1 заканчивается в тОт момент, когда отраженный пучок света при прохождении кареткой 7 всей длины направляющей 1 совпадает с центром диафрагмы. Устранение влияния износа тросика на точность измерения и отсутствие люфтующего Перекоса при перемещении оптической каретки по направляющей позволяет существенно повысить точность измерения при одновременном повьппении надежности устройства для управления движением оптической каретки в интерферометре, которое может быть использовано в различных типах интерферометров. Формулаизобрете Устройство для управления движением оптической каретки в интерферометре, содержащее направляющую и механизм перемещения каретки с ведущим узлом, отличающееся тем, что, с целью ловьпиения точности измерений при одновременном увеличении его надежности, ведущий узел выполнен в виде механизма, состоящего из ходового винта с хвостовой опорой, свободный торец которой снабжен сферическим гнездом, ролика-гайки, установленной на ходовом винте, снабженной винтовой нарезкой со сферическим профилем на внешней цилиндрической поверхности и по крайней мере двумя диаметрально .противоположными; цилиндрическими отверстиями, параллель95 ными оси ролика гайки, вилки сцепления со штоками в виде цилиндрических стержней, концы которых снабжены шарами, вставленными с возможностью скольжения в цилиндрические отверстия ролика-, гайки, и опорного шарика с пружиной, причем, в вилке сцепления выполнено гнездо, в котором установлены с возможностью скольжения хвостовая опора ходового винта и опорный шарик с пружиной, а свободный торец ходового винта жестко закреплен в направляющей. Источники информации, принятые во внимание при экспертизе 1.Тарасов К. И. Спектральные приборы. М., Машиностроение, 1977, с. 302. 2.Тарасов К. И. Спектральные приборы JH., Машиностроение, 1977, с. 315317.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Система программированного профилирования поверхности катания колесной пары рельсового транспортного средства | 2018 |
|
RU2709910C2 |
| Веломобиль | 1987 |
|
SU1512848A1 |
| РЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ МОНТАЖА И ДЕМОНТАЖА ПРОВОДОВ КОНТАКТНОЙ ПОДВЕСКИ ПОД ЗАДАННЫМ НАТЯЖЕНИЕМ И СПОСОБЫ МОНТАЖА ПРОВОДОВ КОНТАКТНОЙ ПОДВЕСКИ ПРИ ПОМОЩИ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2097218C1 |
| АВТОМАТИЧЕСКОЕ ТЯГОВО-СЦЕПНОЕ УСТРОЙСТВО | 1999 |
|
RU2154581C1 |
| Устройство для обработки изделий из высокопрочного камня | 1977 |
|
SU698772A1 |
| БИЬЛИСГЕНД_ | 1973 |
|
SU367581A1 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| ПРИВОД УПРАВЛЕНИЯ ПРИСЛОННО-СДВИЖНОЙ ДВЕРИ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2765326C1 |
| УСТРОЙСТВО ДЛЯ РЕЛАКСАЦИИ ОСТАТОЧНЫХ НАПРЯЖЕНИЙ И СТАБИЛИЗАЦИИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ДЕТАЛЕЙ ЦИЛИНДРИЧЕСКИХ ФОРМ | 2023 |
|
RU2830378C1 |
/ ////Iiu/ // /
77777//7ff7//ff7//f//ff/ff//f//f/f/ff//fffffffftf/ff/tf///fff//f
uff
Фиг.Ъ
