(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГРУППОЙ ТЕХНОЛОГИЧЕСКИХ АГРЕГАТОВ
Изобретение относится к логическим системам управления группой однотипных агрегатов с поочередным выполнением режимов, характеризующихся дискретными технологическими операциями.
Известны устройства для управления периодическими процессами, содержащие блоки логических условий, преобразователей, матрицу ИЛИ fll .
Однако известные устройства сложны по конструкции.
Наиболее близким к предлагаемому по технической сущности является устройство управления, содержащее блоки коммутации, разрешения операций, в которых установлены элементы ИЛИ и И, формирования операций, дистанционного управления, вызова, сигнализации, распрелеления сигналов и блоки датчиков времени С 2 .
Известное устройство осуществляет контроль группы исполнительных меха- , низмов, срабатывающих на каждой one- . рации.
При работе устройства с последовательным срабатыванием одного исполнительного механизма на каждой операции такая схема является сложной.
Цель изобретения - уменьшение аппаратурных затрат.
Указанная цель достигается тем, что в устройстве, содержащем блоки вызова, коммутации, блок разрещения операций, в котором установлены элементы И, блок
10 формирования операций, блоки дистанционного управления, в которых установлены пневмотумблеры, и блок сигнализации, в блоках коммутации.и сигнализации установлены пневмоэлектропреобразователи,
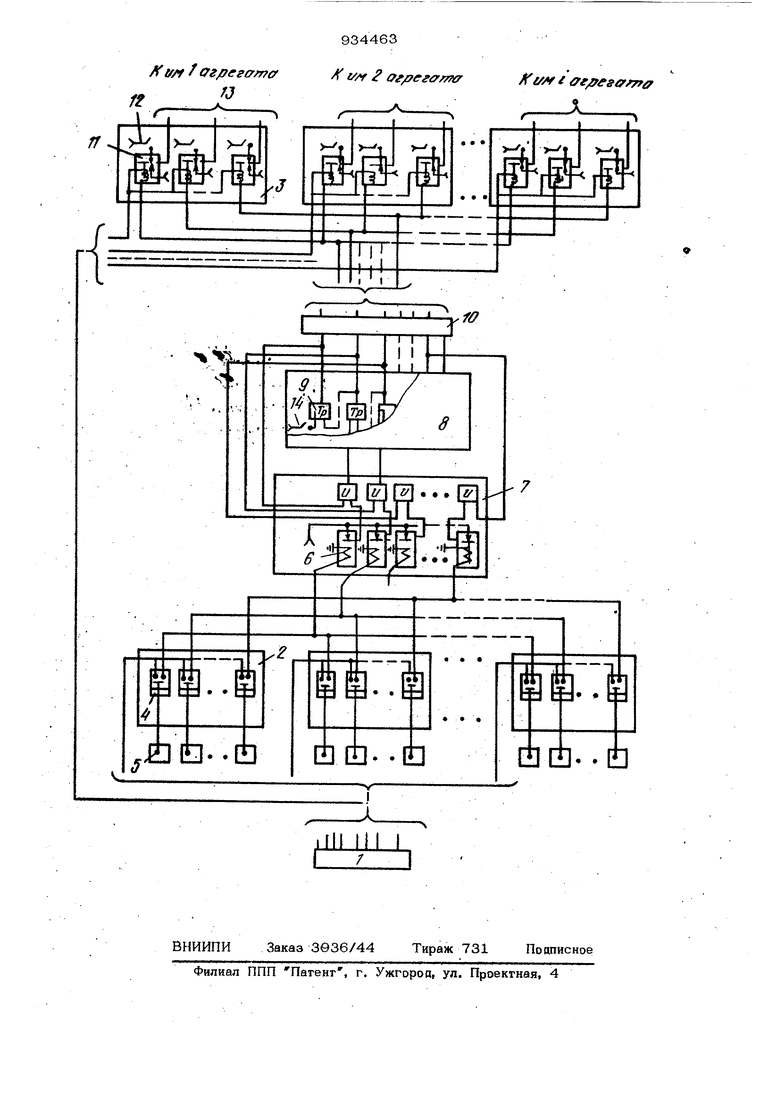
15 в блоках разрешения операций и дистанционного управления - электропневмо- преобразователи, в блоке формирования операций - пневматические триггеры с раздельными входами, причем пневмати20ческие входы пневмоэлектропреобразова- телей блоков коммутации соединены с датчиками положения исполнительных механизмов, электрические входы - с блоком вызова, а электрические выходы, соответствующие одноименным исполнительным механизмам, объединены и их общие щины подключены к электропнев- мопреобразователям блока разрешения операций, первые входы элементов И соединены с выходами электропневмопреобразователей блока разрешения операций, вторые входы - с выходами триггеров блока формирования операций, а выходы элементов И - с включающими входами триггеров, вход сброса казкдого триггера подключен к выходу последующего триггера, выходы триггеров через пневмо-. электропреобраэователи блока сигнализации соединены со вторыми электрическими входами электропневмопреобразоватвт лей блоков дистанционного управления, с первыми электрическими входами которы .соединены выходы блока вызова, с первыми цневматическими входами соединен канал питания, со вторыми пневматическими входами соединены тумблеры блоко дистанционного управления, а выходы электропневмопреобрааователей блоков дистанционного управления подключены к выходным каналам устройства. На чертеже приведена схема предлагаемого устройства. Устройство содержит блок 1 вызова, соединенный с блоками 2 коммутации и 3 дистанционного управления, каждый блок 2 коммутации содержит пне моэлектропреобразователи 4, электрические в;соды которых соединены с адресными линиями блока 1- вызова, а пневматические входы - с выходами датчиков 5 положения исполнительных механизмов. Выходы пневмоэлектропреобразователей 4 одноименных датчиков объединейы и их общие шины подключены через входы электропневмопреобразователей 6 к первым входам элементов И блока 7 разрешения операций, ко вторым входам элементов И которого подключены выходы блока 8 фop шpoвaния операций. Выходы элементов И блока разрешения операций соединены со входами блока 8 формирования операций,. построенного на пневматических триггерах 9 с раздельными 1 входами. Выходы триггеров 9 блока 8 соединены через пневмоэлектропреобразователи блока 10 сигнализации со вторыми электрическими входами, соотвётс вуюшими одноименным операциям, элект пневмопреобразователей 11 блоков 3 ди станционного управления, первые электрические входы которых соединен1Ь1 с адресными линиями от блока 1 вызова, 93 3-4 соответствующими номеру подключаемого к устройству агрегата. Вторые пневматические входы электропневмопреобразователей 11 соединены с пневмотумб- лерами 12 дистанционного управления, первые пневматические входы соединены с линией питания, а выходы подключены к выходным каналам 13 устройства. Первый триггер 9 соединен с пусковым тумблером 14. Устройство работает следующим образом. В блоке 1 вызова адресны и тумблерами .формируется сигнал на подключение устройства к аанно агрегату. Адресный сигнал подается на электрические входы пневмоэлектропреобразователей 4 соответствующего блока коммутации и на первые электрические входы электропневмопреобразователей 11 блока дистанционного управления того же агрегата. Замыканием пускового тумблера 14 взводится первый триггер 9 блока 8 формирования операций. Выход первого триггера поступает на один из входов элемента И блока 7 разрешения операций и через преобразователь блока 10 сигнали- на второй электрический вход элек троп невм опреобразова теля 11 блока дистанционного управления, который, срабатывая, соединяет линию питания с сооответствуюшим выходным каналом 13. , Пневматический сигнал поступает на исполнительный механизм. Датчик 5 положения исполнительного механизма срабатывает и его выходной сигнал поступает на преобразователь 4 блока коммутации. Электрические контакты пневмоэлектропреобразователя 4 замьшаются, тем самым замыкая цепь электропневмопреобра- зователя 6 блока 7 разрешения операций, который срабатывает и своим выходным сигналом взводит следующий триггер 9 блока 8 формирования операций. Выходной сигнал триггера 9 сбрасывает предыдущий триггер и замыкает через пневмоэлектро- преобразователь блока 1О сигнализации цепь следующего электропневмопреобра- з1звателя 11 блока 3 дистанционного управления, подавая команду на срабатыва- ние следующего исцолнительного механизма, начинает выполняться следующая технологическая операция. Блок 10, сигнализации содержит аппаратуру для сигнализации о протекающей технологической операции, сигнализации аварийных состояний. Кроме того, блок сигнализации оснащен пневмосхемой с установленными на
ней следящими переключателями, применение которых позволяет осуществлять переход с автоматического управления на дистанционное одним переключателем Автоматика - дистанционно без проведения подготовительных сшера1шй.
Во время работы устройства в режиме Автоматика с одним из агрегатов остальные агрегаты могут управляться с соответствующих блоков дистанционного управления с помощью пневмотумблеров 12.
Технико-экономический эф4«кт достигется за счет уменьшения аппаратурных затрат при изготовлении устройства.
Формула изобретения
Устройство для управления группой технологических агрегатов, содержащее блоки вызова, коммутации, блок разрешения операций, в котором установлены элементы И, блсж формирования операций, блоки дистанцкомн1Ио управления, в которых установлены пневмотумблеры, и блок сигнализации, отличающееся тем, что, с целью уменьшения аппаратурных затрат, в блоках коммутации и сигнализации установлены пневмо лектропреобразователи, в блоках разрешения стераций и дистанционного управления электропневмопреобразователи, в блсже формирования операций - пневматические т|жггеры с раздельными входами, причем пневматические входы пневмоэлектропреобразователей блоков коммутации соединены
с датчиками положения исполнительных механизмов, электрические входы - с блоком вызова, а электрические выходы, соответствуюшие одноименным исполнительным механизмам, объединены и их обшие шины подключены к электропневмопреобразователям блока разрешения оепраций, первые входы элементов И соединены с выходами электропневмопреобразователей блока разрешения операций, вторые входы - с выходами триггеров блока формирования операций, а выходы элементов И с включающими входами тригге юв, вход каждого трштера подключен к клходу последующего триггера, выходы триггеров через пневмоэлектропреобраэсяватели блока сигнализации соединены со электрическнмя входами алектропневмопреобразователей блоков {щстаншюнного. управления, с первыми электрическими входами которых соединены выходы блока вызова, с первыми пневматическими входами соединен канал питания, со вторыми пневматическими входами соединены тумбле1Я 1 блоков дистанционного управления, а выходы элект|ропневмопреобразователей блоков дистанционного управления подключены к выходным каналам устройства.
Источники информапви, принятые во внимание при экспертизе
1.Берендс Т. К. и др. Элементы в схемы пневмоавтоматики, 1976,-с 192, рис. 145.
2.Авторское свидетельство СССР № 307399, кл. бОбП) З/ОО, 1970 (прототип). 934463 /f y/f ffgjoesffmff Ж i/ P /J
I null I I vv. г/ f ffe egff/TTff X

| название | год | авторы | номер документа |
|---|---|---|---|
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU935876A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU953625A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1970 |
|
SU288439A1 |
| ПНЕВМАТИЧЕСКАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯП-1АЯ•••:-У1^~r^'-f"^,r' | 1971 |
|
SU307399A1 |
| СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ ПРОИЗВОДСТВЕННЫМИПРОЦЕССАМИ | 1965 |
|
SU167690A1 |
| Система дистанционного управления двигателем | 1974 |
|
SU631670A1 |
| Автоматизированная система управления производственными процессами | 1973 |
|
SU492852A1 |
| ПОЗИЦИОНЕР ПРИВОДНОГО МЕХАНИЗМА | 2007 |
|
RU2347951C1 |
| Пневматическая система централизованного контроля и управления | 1980 |
|
SU962848A1 |