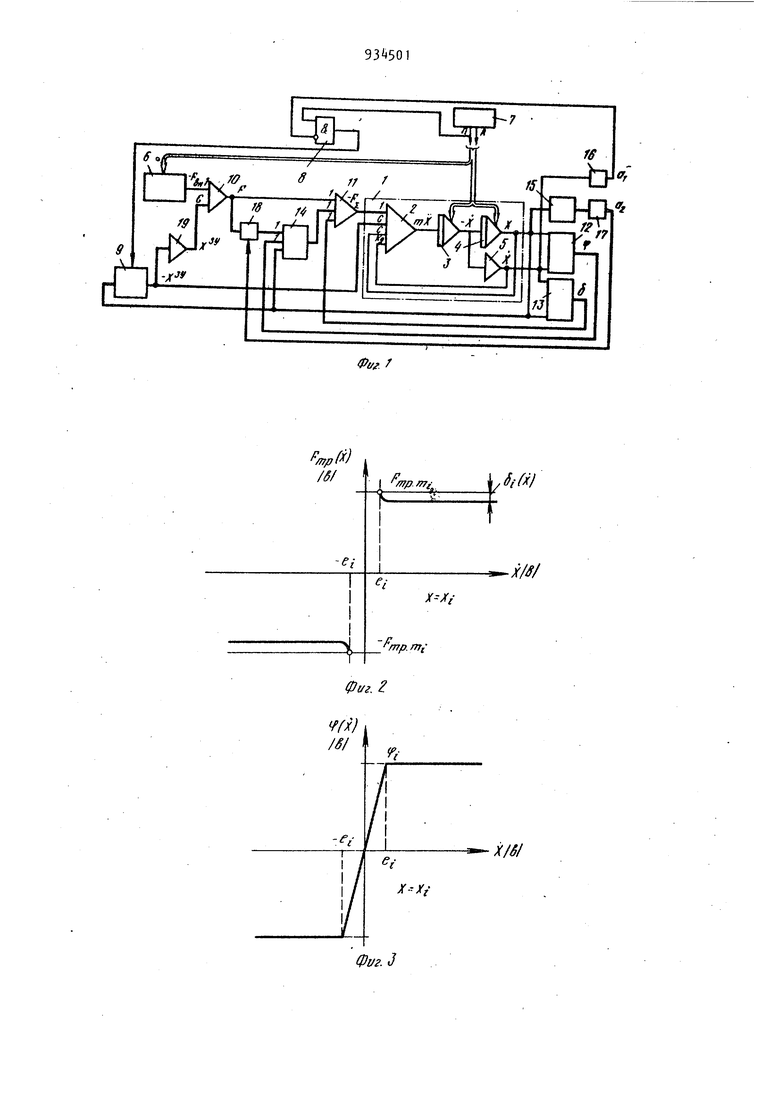
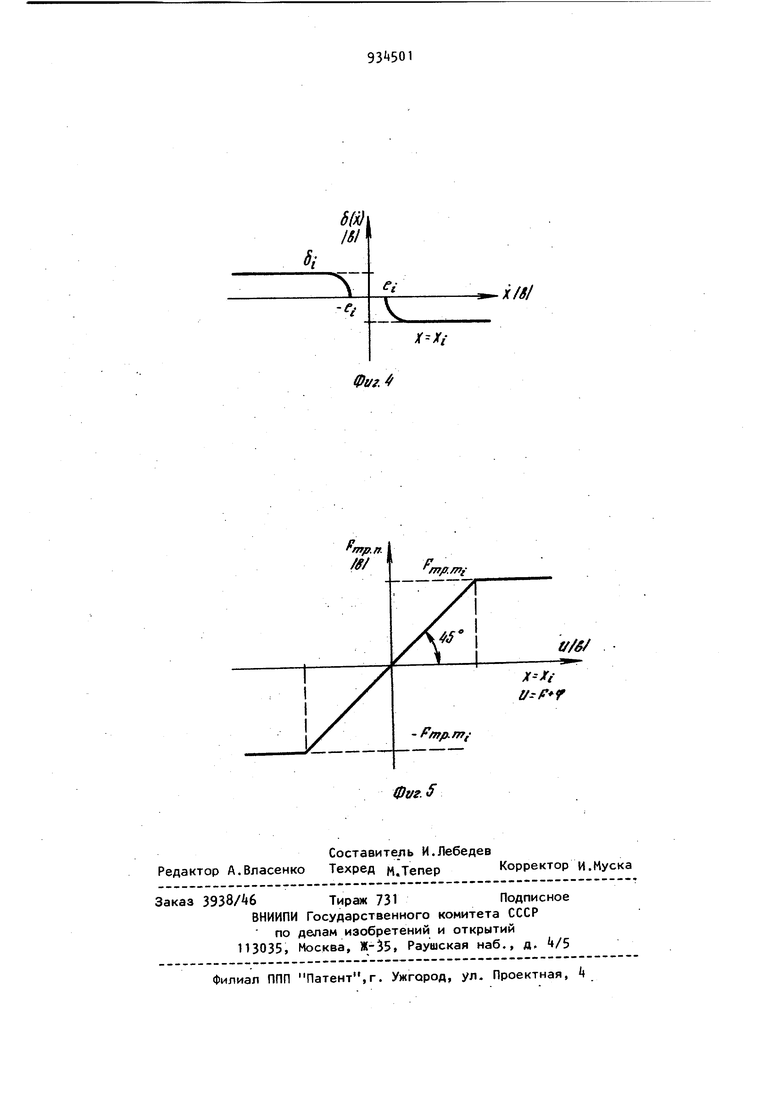
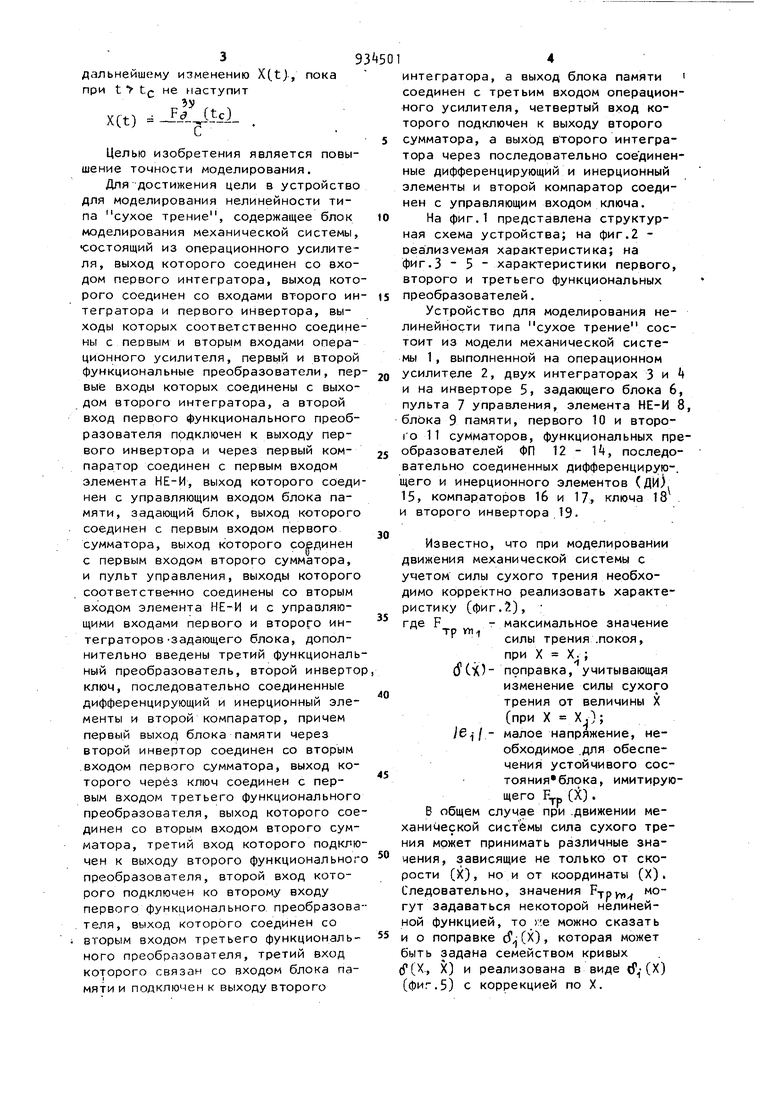
3 э дальнейшему изменению X(t|, пока при t t(; не наступит vrY-i - F (tc) X(t, . Целью изобретения является повышение точности моделирования. Для достижения цели в устройство для моделирования нелинейности типа сухое трение, содержащее блок моделирования механической системы, состоящий из операционного усилителя, выход которого соединен со входом первого интегратора, выход кото рого соединен со входами второго ин тегратора и первого инвертора, выходы которых соответственно соедине ны с первым и вторым входами операционного усилителя, первый и второй функциональные преобразователи, пер вые входы которых соединены с выходом второго интегратора, а второй вход первого функционального преобразователя подключен к выходу первого инвертора и через первый компаратор соединен с первым входом элемента НЕ-И, выход которого соеди нен с управляющим входом блока памяти, задающий блок, выход которого соединен с первым входом первого сумматора, выход которого сО:единен с первым входом второго сумматора, и пульт управления, выходы которого соответственно соединены со вторым входом элемента НЕ-И и с управляющими входами первого и второго интеграторов задающего блока, дополнительно введены третий функциональ ный преобразователь, второй инверто ключ, последовательно соединенные дифференцирующий и инерционный элементы и второй компаратор, причем первый выход блока памяти через второй инвертор соединен со вторым входом первого сумматора, выход которого через ключ соединен с первым входом третьего функционального преобразователя, выход которого сое динен со вторым входом второго сумматора, третий вход которого подклю чен к выходу второго функциональног преобразователя, второй вход которого подключен ко второму входу первого функционального преобразова теля, выход которого соединен со вторым входом третьего функционального преобразователя, третий вход которого связан со входом блока памяти и подключен к выходу второго 4 интегратора, а выход блока памяти соединен с третьим входом операционного усилителя, четвертый вход которого подключен к выходу второго сумматора, а выход второго интегратора через последовательно соединенные дифференцирующий и инерционный элементы и второй компаратор соединен с управляющим входом ключа. На фиг.1 представлена структурная схема устройства; на фиг.2 реализуемая характеристика; на фиг.З - 5 - характеристики первого, второго и третьего функциональных преобразователей. Устройство для моделирования нелинейности типа сухое трение состоит из модели механической системы 1, выполненной на операционном усилителе 2, двух интеграторах 3 и t и на инверторе S, задающего блока 6, пульта 7 управления, элемента НЕ-И 8, блока 9 памяти, первого 10 и второго 11 сумматоров, функциональных преобразователей ФП 12 - 14, последовательно соединенных дифференцирую-, щего и инерционного элементов (ДЙ). 15, компараторов 16 и 17 ключа 18 . и второго инвертора 19Известно, что при моделировании движения механической системы с учетом силы сухого трения необходимо корректно реализовать характеристику (фиг.-), где F - максимальное значение силы трения .покоя, при X X.; (УСХ) поправка, учитывающая изменение силы сухого трения от величины X (при X X,}; малое напряжение, необходимое .для обеспечения устойчивого состояния блока, имитирующего (Х). В общем случае при .движении механической системы сила сухого трения может принимать различные значения, зависящие не только от скорости (X), но и от координаты (X). Следовательно, значения мо гут задаваться некоторой нелинейной функцией, то можно сказать и о поправке cf (X), которая может быть задана семейством кривых 5(Х, X) и реализована в виде (X) (фиг.5) с коррекцией по X. Для реализации разности сил F - F-rp(X,X), действующих на ме ханическую систему, в предлагаемо устройстве предназначены сумматор 10 и 11, ФП 12, 13 и k, и ключ 1 Характеристика ФП 12 (фиг.З) соответствует типовой нелинейности ограничения с функционально изменяющимся напряжением отпирани диодов % , зависящим от значения Пр 1нимаем, что - /УЛ-(о.1--ЬО/Р р, . ФП 13, предназначенный для реализ ции поправки (Г(Х, Х(фиг,4, пр ставляет собой нелинейный блок с функционально изменяющимся в зави симости от значений X коэффициент усиления. Для учета изменения напряжения (Х) в ФП 12 и 13 предусмотрена коррекция по X: коэффициента усилений в ФП 12 и напряжения отпирания диодов на участке О 1Х/ f / - в ФП 13 1фиг. - ФП И, предназначенный для моделирования значений силы трения покоя f(U, X), где и F + Ц) (фиг.5), представляет собой сумматор с подключенной к нему схемой ограничения на диодах, входы котор го С 1-ый и 2.-ОЙ входы ФП k) связа ны, соответственно, с выходом сумматора 11 через ключ 18 (F или 0) и с выходом ФП 12 (У) , Коэффициент усиления по каждому входу равен 1. Напряжение отпирания диодов F-m функционально изменяется в зависимости от значения X. Блок 15 выполнен по типовой схе ме и имеет передаточную функцию V)-igf - JC Тр K- -J--- -, где К и Т являются параметрами настройки блока. Связь блока 15 через компаратор 17 с управляющим входом ключа 18 обеспечивает два положения схемы: при X const У О и а О - в ход сумматора 10 соединен с первым входом ФП 1А; при X 5 const / пер вый вход ФП И переключен на шину с потенциалом 0. Таким образом, блок 15 с компаратором 17 и ключом 18 предназначены, для переключения первого вхо16да ФП 1+ на напряжение О после страгивания и последующего движения механической системы. Описанные выше ФП 12 - 14 и блок 15 с компаратором 17 и ключом 18 позволяют при подключении выходов 10, 13 и на входы сумматора 11 получить его выходе: О, при Ррц - const Fg О, f const, но i ,- эм ----- , X const, X О и /F/S/F , 0, при X s PT| кгч const, X 0 и I F/ /I-Tp 4 I F3, F - F-rp(X, X), при ,./ Работа аналогового вычислительного устройства для моделирования нелинейности типа сухое трение происходит следующим образом. До начала интегрирования на выходе усилителей 3 и i устанавливают соответствующие значения начальных условий Х(0) О и Х(0) Хр. На выходе блока 6, выполненного на операционных усилителях, например, в виде генератора нелинейных колебаний, устанавливают начальные уело ви я f &HOДля состояния покоя системы должно выполняться условие: IbVio о °. До начала интегрирования командыП П О, поэтому напряжение X (0) XQ. Следовательно, при t О напряжение F(0) на выходе сумматора 10 должно быть равно нулю, напряжения vp и cf на-выходе ФП 12 и 13 и напряжение v на выхо е ФП k также должны быть равны ную. Тогда F«ji(0) на выходе сумматора 1 равно нулю и напряжение тХ на ыходе усилителя 2 равно нулю, покольку СХр- ГХ(0) 0. При пуске устройства с пульта 7 правления на цепи управления интегаторов 3 и модели механической истемы 1 и интеграторов блока 6 оступают команды П (подготовка) и (пуск); Кроме того, команда П 1 оступает на элемент НЕ-И 8, управяющий блоком 9 памяти. при X о выполняется . Так как с выхода элемента 8 ко О, то П анда 11 1 поступает на управляюий вход блока памяти 9. При этом а выходе 9 запоминается напряжение ) -Хо. 7Э В течение времени, пока . const изменяется в малых пределах так что сохраняется условие /F/ /РТР /1 Fg остается равным нулю при ) в const блок 1 находит ся в стабильном с(стоянии благодаря наличию связей KgX и СХ. При этом, если )( О, напряжение на выходе ФП И, соответствующее силе трения покоя и (t), равно по величине и противоположно по знаку напряжения F(t), что полностью соответствует физическому состоянию системы. Как только увеличение /F / приведет к возникновению на выходе сум матора 10 напряжения I F/r/Р р,,/, напряжение на выходе ФП И выйдет на уровень ограничения, т.е. станет равным F-rpn , и напряжение на выходе сумматора 11 станет равны PS Р РТРУП, ОВ результате этого в блоке 1 появляются напряжения тХ . О, X О и X т Хр, знаки которых при стра.гива нии системы совпадают со знаком напряжения F. При достижении |Х/7/ / наступае 6. 1(), и на выходе блока 9 памяти вместо напряжения -Х(0) - X появляется напряжение -X(t). Изменение напряжения X, кото|9ое контролируется блоком ДИ 15- вызыва ет появление V 0. При / M/J/f/Haчто приводит к сраб ступает а, тыванию ключа 18, который переключа 14 с напряжения F ет первый вход ФП на напряжение 0; При / ,-/, где напряжение с выхода ФП 12 V 0 поступает на второй вход ФП Н, причем обязательно с тем же знаком, что и напряжение F, так как при Х.0, f О, а при X 0 V О (фиг.З). Поэтому до срабатывания клю;ча 18 и F.+ Ф , а после срабатывания и If , причем Fjp м iTpw/j если и F +4- и /F/ 7/Ртр 1и/При и f возможно кратковременное уменьшение Fjn , что и при нарастании F вызывает кратковременно более интенсивное нарастание /X/ и его увеличение до / / il тогда происходит выход на огпаничение напряжения if наступает и tf и вновь восста навливается F-rph FTPHI,-, При X /7/ / напряжение „ Fypj не изменяется по знаку до тех пор, пока в процессе движения не произойдет смена знака напряжения X. Таким образом, вместо поочередного включения сигналов д и Р, как это выполнялось в известном устройстве, осуществляется более точное вычисление значений F с помощью блока ФП 14 на всех режимах работы механической системы при любых значениях X, что оказывает существенное влияние на повышение качества моделирования переходных процессов при страгивании и останове системы. Одновременно с выходом if на ограничение , на третий вход сумматора 1 1 с выхода ФП 13 поступает поправка d(( фиг.5} , учитывающая изменение силы сухого трения при . После обработки блоком 9 команды П О на систему 1 начинает действовать напряжение Р Fg(t) - CX(t), вычисляемое сумматором 10, а напряжение -)t(t) поступающее с выхода блока 9 на третий вход усилителя 2, уравновешивает напряжение X(t), поступающее на его второй вход. Если в процессе движения системы 1 величина принимает значения / У/ , то при на выходе сумматора 11 существует напряжениеFS Р - РТРИ ,-, которое может иметь различные значения любого знака и, в частном случае, равняться нулю. В случае, когда при /Ч/ Г6/, произойдет X О, то при /F/y/P-rp Fs/ О, и движение продолжится, а при /F/ /РТРШ система остановит ся. Этот останов в момент времени t может иметь место как при условии /F(tc)/ /F6H(te) - CX(te) О, так и при условии F(tc) О и продолжаться при t7t.дo тех пор, пока Fg, не приводит к возникновению на выходе 10 напряжения /Ft)/ 7/Р1-ри, -/ к новому етрагиванию системы.
99
Таким образом, выполнение устройства в соответствии с изобретением позволяет более точно моделировать статику механической системы, и повысить качество моделирования переходных процессов в ней , в том числе на нулевых и близких к нулю скоростях, при наличии сил ,сухого трения.
Формула изобретения
Устройство для моделирования нелинейности типа сухое трение, содержащее блок моделирования механической системы, состоящий из операционного усилителя, выход которого соединен с .входом первого интегратора, выход которого сйединен с входами второго интегратора и первого инвертора, выходы которых соответственно соединены с первым и вто|РЫМ входами операционного усилителя, первый и второй фукнциональные преобразователи, первые входы котог рых соединены с выходом второго интегратора, а второй вход первого функционального преобразователя подключен к выходу первого инвертора и через первый компаратор средйМен с первым входом элемента НЕ-И, выход которого соединен с управляющим входом блока памяти, задающий блок, выход которого соединен с первым входом первого сумматора, выход которого соединен с первым входом второго сумматора, и пульт управления, выходы которого соответственно соединены со вторым входом элемента НЕ-И и с управляющими входами первого и второго интегра110
торов и задающего блока, отличающееся тем, что, с целью повышения точности моделирования, в него дополнительно введены третий функциональный преобразователь, второй инвертор, ключ, последовательно соединенные дифференцирующий и инерционный элементы и второй компаратор, причем первый выход блока памяти через второй инвертор соединен со вторым входом первого сумматора, выход которого через ключ соединен с первым входом третьего функционального преобразователя, выход которого соединен со вторым входом второго сумматора, третий вход которого подключен к выходу второго функционального преобразователя, второй вход которого подключен ко второму входу первого функ ционального преобразователя, выход которого соединен со вторым входом третьего функционального преобразователя, третий вход которого связан с входом блока памяти и подключ к выходу второго интегратора, выход блока памяти соединен с третьим входом операционного усилителя, четвертый вход которого подключен к выходу второго сумматора, а выход второго интегратора через последовательно соединенные дифференцирующий и инерционный элементы и второй компаратор соединен с управляющим входом ключа.
Источники информации, принятые во внимание при экспертизе
1.Авторское cвидeтeльctвo СССР № SSJSyS, кл. G Об G 7А8, 1970.
2.Авторское свидетельство СССР по заявке № 2830568/18-24,
кл. G Об G 7Л8, 1979 (прототип).
Х/61
Si
x;
m
X/S/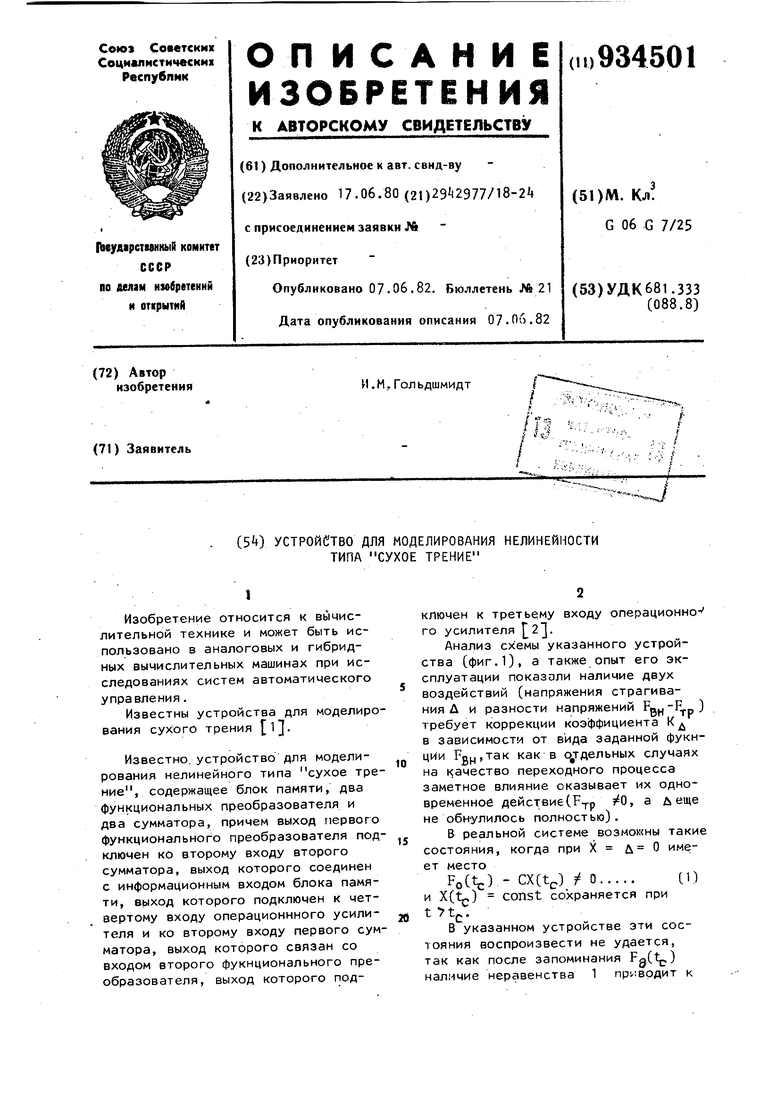
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования удара тела о неподвижную преграду | 1985 |
|
SU1381341A1 |
| Система экстремального регулирования | 1981 |
|
SU1056132A1 |
| Функциональный частотный преобразователь | 1983 |
|
SU1120365A1 |
| Устройство для моделирования вентильного электродвигателя | 1988 |
|
SU1596357A1 |
| Устройство для моделирования удара твердых тел | 1988 |
|
SU1567889A2 |
| Устройство для моделирования электрических машин | 1988 |
|
SU1597886A1 |
| Устройство для моделирования двигателя постоянного тока | 1981 |
|
SU955120A1 |
| Широтно-импульсный развертывающий функциональный преобразователь | 1987 |
|
SU1474693A1 |
| Устройство для управления движением адаптивного транспортного робота | 1983 |
|
SU1138786A1 |
| Преобразователь угла поворота вала в код | 1989 |
|
SU1633492A1 |