(5) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1978 |
|
SU685614A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ГРУЗОПОДЪЕМНЫМ УСТРОЙСТВОМ | 1992 |
|
RU2067935C1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| Манипулятор | 1982 |
|
SU1085805A1 |
| Подгрузочный манипулятор | 1979 |
|
SU823113A1 |
| Контейнеровоз | 1986 |
|
SU1418121A1 |
| Урановешенный манипулятор | 1979 |
|
SU848350A1 |
| КРАН-ПОГРУЗЧИК (ВАРИАНТЫ) | 2006 |
|
RU2317248C2 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ГРУЗОВ И ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2078934C1 |
| Навесное устройство к грузоподъемной машине | 1987 |
|
SU1527140A1 |
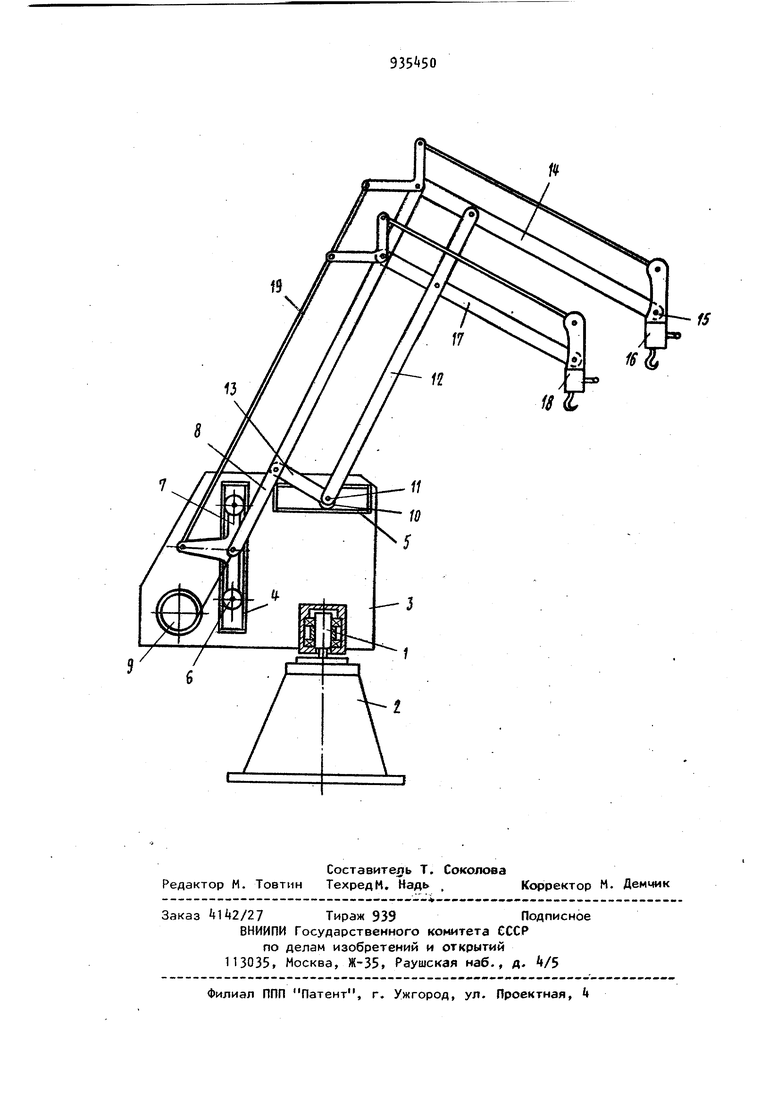
Изобретение относится к технологическому оборудованию, применяемому для механизации погрузочно-разгрузочных работ при работе в складских поме щениях, при укладке и снятии деталей с технологического оборудования, а именно, к манипуляторам, имеющим стрелу в виде пантографа. По основному авт. св. W 68561 известен манипулятор, содержащий поворотный корпус, стрелу в виде пантографа, две оси шарниров которого лежат на оси подвески грузового блока, закрепленного на конце замыкающего рычага пантографа, при этом одн из осей снабжена роликом и установлена в горизонтальных направляющих корпуса, каретку с роликами, установ ленную в вертикальных направляющих корпуса, и смонтированный на корпусе электромеханический привод 113. Однако при выполнении ряда работ, когда возникает необходимость попере менно перемещать грузы разной массы В пределах различных рабочих зон, в частности переносить тяжелый груз на небольшое расстояние, а относительно легкий на большее, приходится применять два или более манипуляторов, так как применение одного становится нецелесообразным, а зачасту1д невозможным. Например, при снятии с транспортного средства контейнера, содержащего несколько объектов и последующем перемещение объектов, изъятых из контейнера и размещении их на стеллажах склада, в гнездах накопителя и т.п. нередко приходится прибегать к дополнительным грузоподъемным средствам вследствие ограни- ченности рабочей зоны манипулятора или его грузоподъемности. Цель изобретения - расширение технологических возможностей манипулятора. Указанная цель достигается тем, что стрела снабжена, по крайней мере одним дополнительным звеном, установленным параллельно замыкающему рычагу пантографа, несущему грузовой блок, при этом упомянутое дополнител нов звено оснащено дополнительным грузовым блоком, ось подвески которо го лежит на одной прямой с осью под вески грузового блока на замыкающем рычаге пантографа и осью роликов, установленных в горизонтальных направляющих. На чертеже изображен манипулятор общий вид. На вертикальной оси 1 основания свободно вращается корпус 3, в щеках которого закреплены вертикаль ные и горизонтальные 5 направляющие. В направляющих на двух парах роликов 6, перемещается каретка 7, шарнирно соединенная со стрелой, выполненной в виде четырехзвенного шарнирного механизма пантографа и ис ходным звеном-рычагом 8. Шарнир соединения каретки со звеном 8 является первой рабочей точкой пантографа. К корпусу 3 крепится также электромеханический привод 9, ведомое звено которого связано гибким элементом с кареткой 7. В горизонтальных направляющих 5 перемещается пара роликов 10, ось 11 которых совмещена с осью шарнира соединения рычагов 12 и 13 и является второй рабочей точкой пан тографа. Замыкающий рычаг 1 шарнирн связан с рычагами 8 и 12 таким образом, что рычаги 8 и 12, а также 13 и 1 постоянно взаимно параллельны. На оси 15, расположенной на конце рычага 14, подвешен грузовой блок 16. Ось 15 является третьей рабочей точкой пантографа, и все три рабочие точки располагаются на одной прямой. Параллельно рычагу 14 установле но дополнительное звено рычаг 17, шарнирно связанный с рычагами 8 и 12. На конце рычага 17, на оси лежащей на прямой, соединяющей три рабочие точки пантографа, подвешен дополнительный грузовой блок 18. Расстояние между.рычагами 14 и 17 выбирается таким, чтобы передаточное отношение рычажного механизма 8, 12, 13 и 17 обеспечивало возможность переноса тяжелых грузов в относительно небольшой рабочей зоне, а передаточное отношение рычажного 9 4 механизма 8,12,13 и 14 обеспечивало обслуживание заданной увеличенной рабочей зоны. Система параллелограммных механизмов 19 обеспечивает постоянную ориентацию грузовых блоков 16 и 18. Устройство работает следующим образом. При необходимости перенесения тяжелого груза,его подвешивают к груаЪвому блоку 18, Например, с помощью этого блока можно снять контейнер с платформы автокары и перенести его на пол. Для того, чтобы извлечь детали или агрегат из контейнера и перенести его на стеллаж, транспортер, в гнездо накопителя, используется грузовой блок 16. Применение изобретения позволит при механизации погрузочно-разгрузочных операций не применять дополнительных грузоподъемных устройств, ускорить и облегчить работу оператора за счет того, что погрузочный манипулятор обладает малой грузоподъемностью в большой зоне обслуживания и большой грузоподъемностью в малой зоне обслуживания. Формула изобретения MsB ни пул я тор по авт. св. СССР № 685614, отличающийся тем, что, с целью расширения его технологических возможностей, стрела снабжена по крайней мере одним дополнительным звеном, установленным параллельно замыкающему рычагу пантографа, несущему грузовой блок, при этом упомянутое дополнительное звено оснащено дополнительным грузовым блоком, ось подвески которого лежит на одной прямой с осью подвески грузового блока на замыкающем рычаге пантографа и осью роликов, устанрвленных в горизонтальных направляющих. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 685614, кл. В 66 С 23/14, 1978 (прототип).
