(54) ПОГРУЗОЧНЫЙ МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Погрузочный манипулятор | 1987 |
|
SU1479265A2 |
| Головка схвата манипулятора | 1982 |
|
SU1057270A1 |
| Манипулятор | 1980 |
|
SU935450A2 |
| Манипулятор | 1978 |
|
SU685614A1 |
| Манипулятор с ручным управлением | 1985 |
|
SU1315288A1 |
| Урановешенный манипулятор | 1979 |
|
SU848350A1 |
| Манипулятор для проведения грузовых работ | 1976 |
|
SU674970A1 |
| Погрузочный манипулятор | 1980 |
|
SU906934A1 |
| Сбалансированный манипулятор с ручным управлением | 1988 |
|
SU1618634A1 |
| СТАНОК ДЛЯ ОБРУБКИ, КЛЕПКИ, ТРАМБОВКИ | 2009 |
|
RU2412783C1 |

1
Изобретение относится к подъёмнотранспортному оборудованию, а именно, к манипуляторам, применяемым при обслуживании металлорежущих станков, прессов, установке, и снятию деталей с конвейера и т.д.
Известен погрузочный манипулятор, содержащий стрелу, выполненную В виде пантографа, привод вертикального перемещения, грузовой блок с установленной на нем рукояткой управления приводом вертикального перемещения ij.
Недостатком известного устройства является неудобство эксплуатации при работе с крупногабаритными изделиями при увеличенных вертикальных ходах.
Цель ИЕ обретения - повьииевне удобства . эксплуатации и расширение технологических возможностей манипулятора.
Поставленная цель достигается тем, что манипулятор снабжен дополнительной рукояткой с гибким валом и установленной на рукоятке управления скобой, жестко связанной с гибким валом.
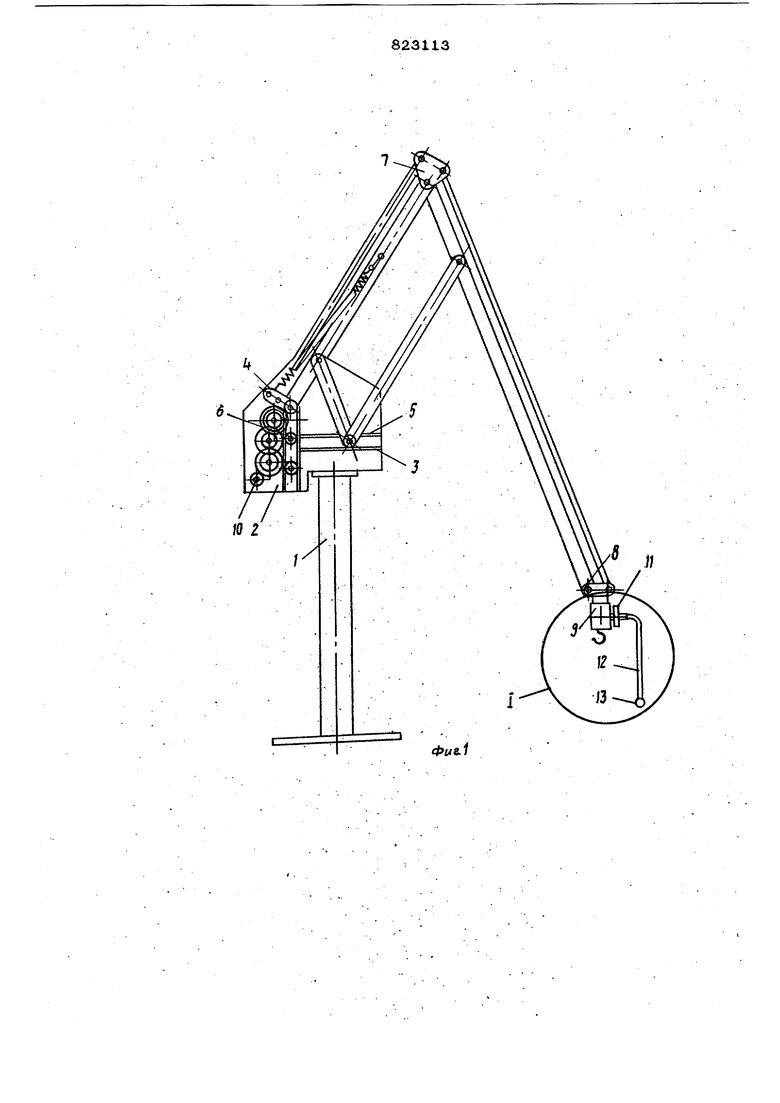
На фиг. 1 изображен погрузочный манипулятор, общий вид, на фиг. 2 - узел на фиг. 1, на фиг. 3 - разрез А-А на фиг. 2..
Погрузочный манипулятор состоит из свободно вращающегося относительно . вертикальной оси колонны 1 корпуса 2, .имеющего направляющие 3 и 4 горизонтального и вертикального перемещений,в которых помещены ролики 5 и 6, оси которых совмещены с осями двух шарниров; пантографа 7, лежащими на одной прямой с осью 8 подвески грузового блока 9. к пантографу. Ролик 6 вертикального перемещения кинематически связан с приводом iO, момент,на котором зависит от положения рукоятки 11 у1фавлеЦия, связанной, например, с потенциометром, размещенным в грузовом блоке 9;
Гибкий .вал 12, несущий на одном ков це Дополнительную рукоятку 13, заканчивается скобой 14, надетой на рукоята 3 11 управления, связанную с потенци ометром валиком 15. . отверстиях скобы 14 вставлены два штыря со взаимно параллельными и перпе дикулярными осями продольной оси скобы 14| так что штырь 16 проходит через скобу насквозь, а штьфь 17 проходит через скобу только с одной . Штыри жестко связаны между собой пластиной 18, поджатой к рукоятке 11 пружиной 19. Устройство работает следующим образом. При работе с крупногабаритным грузом или при необходимости поднять груз на значительную высоту, когда невозможно находиться непосредственно у рукоятки 11, управление осуществляется с помощью дсняолнительной рукоятки 13. Для этого необходимо нажать до упора на головку штыря 16, в результате чего соединенный пластиной 18 со штырем 16 штьфь 17 также опустится вниз. Завести скобу 14 сбоку и надеть ее на рукоятку 11 до упора штыря 16 в валик 15, после чего отпустить головку штыря 16. В {результате этого пружина 19 отожмет головку штыря 16 вверх и соединенный с ним пластиной 18 штырь 17 также 13 поднимается вверх и запрет скобу 14 на валике 15. При повороте рукоятки 13 крутящий момент через гибкий вал 12, скобу 14, рукоятку 11 и валик 15 передается на потенциометр управления приводом вертикального перемещения. Формула изобретения Погрузочный манипулятор, содержащий стрелу, выполненную в виде пан тографа, привод вертикального перемещения, грузовой блок с установленной на нем рукояткой управления приводом вертикального перемещения, отличающийся тем, что, с целью повышения удобства эксплуатации и расширения технологических возмсякностей, он снабжен дополнительной рукояткой с гибким валом и установленной на рукоятке управления скобой, жестко связанной с гибким валом. Источники информации, при&ятые во внимание при экспертизе 1. Беляшш П. Н. Промышленные работы Японии, O63qp зарубежного опыта. НИАТ, 1977, с. 344-362.
/;
Фиг.1
1 А
5
Фиг.2
/5
С
Г7
