(S) СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ ДЛЯ СВЯЗИ ДВУХ ЭНЕРГОСИСТЕМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для связи двух энерго-СиСТЕМ | 1979 |
|
SU817854A1 |
| Устройство для связи энергосистем | 1980 |
|
SU936209A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1427478A1 |
| Устройство для связи двух энергосистем переменного тока | 1980 |
|
SU936210A1 |
| Устройство для связи двух энергосистем | 1979 |
|
SU838886A1 |
| Устройство для связи двух энергосистем | 1978 |
|
SU771796A1 |
| Устройство для связи двух энергосистем | 1980 |
|
SU955356A1 |
| Устройство для связи двух энергосистем | 1987 |
|
SU1529351A2 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1142874A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1473002A1 |
1 ,
Изобретение относится к электроэнергии и может быть использовано в электрических системах для регулирования асинхронизированиых синхронных машин для повышения надежности передачи электрической энергии между энергосистемами, объединенными гибкими межсйстемными связями.
Известен способ управления асинхронизированными синхронными машинами, входящими в устройство для связи двух энергосистем.
Известен способ управления двигателем двойного питания, входящим в устройство для связи двух энергосистем, обмотки статора которого подключают к сети, а обмотки ротора - к регулируемому преобразователю частоты П }.
Наиболее близким по технической сущности к изобретению является способ управления асинхронизированной синхронной машиной, входящей в устрой ство для связи энергосистем, заключающийся в том, что частота сигналов управления каждой из машин составляет половину разности частот объединяемых энергосйстемГ27.
Недостаток способа заключается в том, что при (|юрмировании сигналов управления не учитывается тот факт, что в реальной энергосистеме загрузка машин преобразователя по реактивной мощности., как правило, различна. Известно, то амплитуда напряжения на кольцах ротора асинхронизированной машины является функцией активной и реактивной мощностей.статора, а также скольжения ротора относительно по ля статора. €сли параметры машин вставки одинаковы,то при равных значениях активной мощности и скольжения неравенство реактивных мощностей приводит к неравенству амплитудных значений
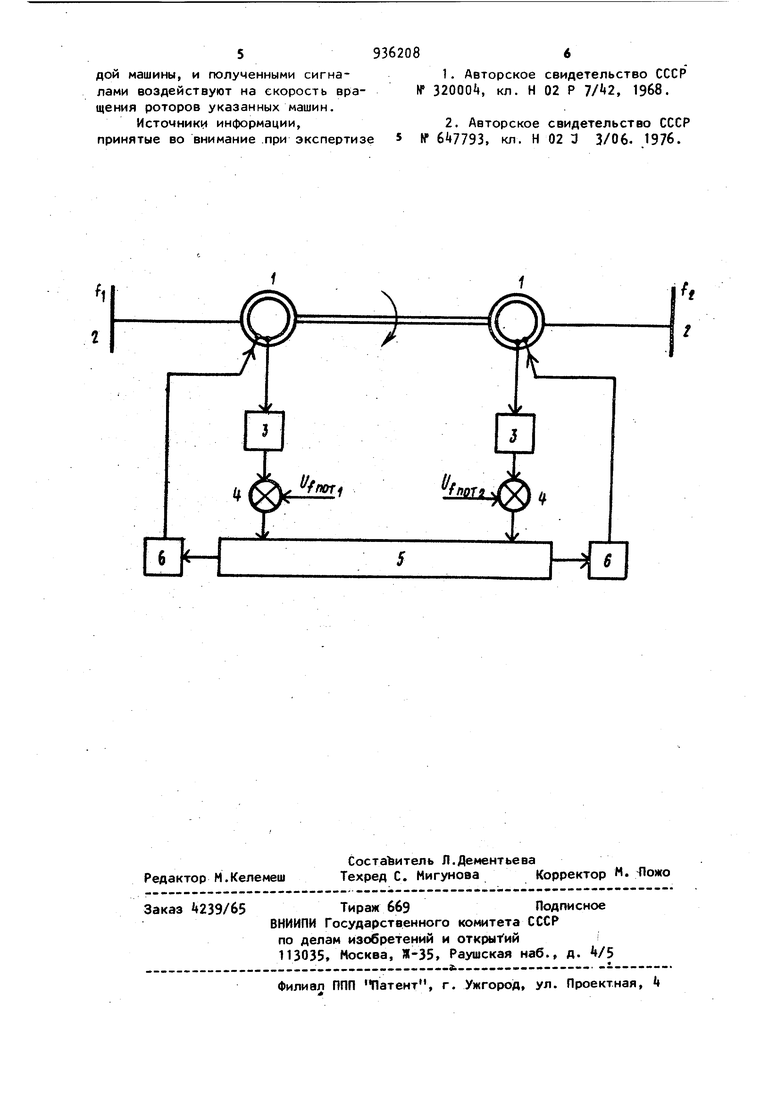
20 напряжений на кольцах роторов. Поэтому для устойчивой работы преобразователя необходимо, чтобы о всех режимах работы преобразователя амплитудмое напряжения на кольцах ротора каждой из машин не превышало предельного или потолочного, которое допускается по условиям работы изоляции ротора или ограничивается источником питания регулятора. Кроме то го, способ формирования сигналов упра ления может привести к выходу на ограничение системы регулирования одной из машин, в то время как система регулирования второй машины располагает некоторым неиспользованным ресурсом, а это приводит к необходимос ти снижения допустимого значения раз ности частот между объединенными эне Ьосистемами, либо к необходимости усиления ротора и повышения мощности 11сточника питания. Цель изобретения - повышение качества передаваемой энергии и надежности работы преобразователя. Поставленная цель достигается тем что при осуществлении cnoct)6a управления устройством для связи двух энергосистем,содержащим две асинхронизированные синхронные машины с жес ко соединенными валами, статорные обмотки каждой из которых подсоединены к своей энергосистеме путем формирования сигналов управления асинхронизированными машинами в функ ции от разности частот скольжения объединенных энергосистем, дополнительно измеряют амплитудное значение напряжений на кольцах роторов асинхр низированных машин, формируют сигналы, пропорциональные разности текущей и предельно допустимых значений напряжений на кольцах роторов каждой машины, и полученными сигналами воздействуют на скорость вращения роторов указанных машин. При регулировании предложенным сп собом возможности систем управления обеих машин преобразователя используются полностью. При этом машина, генерирующая большую реактивную мощность, имеет меньшую скорость вращения поля, а амплитудные значения напряжений на кольцах роторов обеих машин равны.. На чертеже представлен вариант блок-схемы устройства, реализующего предложенный способ. Устройство работает следующим образом. К кольцам роторов асинхронизированных машин 1 вставки, соединяющей шины двух энергосистем 2 частотами и fn, подключены датчики амплитудных значений напряжений на кольцах роторов 3, с выходов которых сигналов поступают на входы сумматоров Ц, на вторые входы которых подаются сигналы, пропорциональные предельно допустимым значениям напряжений на кольцах роторов. С выходов сумматоров k сигналы,пропорциональные ресурсам систем регулирования машин, поступают на два входа блока формирования частот сигналов управления 5 на третий вход которого поступает сигнал, пропорциональный разности частот между объединяемыми системами 2. С выходов блока формированиячастот управления 5 сигналы поступают на входы блоков формирования сигналов управления 6, а с их выходов - на кольца роторов машин вставки. Таким образом, предложенный способ управления позволяет более эффективно использовать возможности машин вставки, увеличить диапазон допустимой разности частот между объединяемыми энергосистемами, повысить качество передаваемой энергии и надежность работы устройства для связи двух энергосистем. Технико-экономическая эффективность предлагаемого способа заключается в обеспечении более высоких показателей надежности работы устройства и объединяемым им энерго систем. Формула изобретения Способ управления устройством для связи двух энергосистем, содержащим две асинхронизированные синхронные машины с жестко соединенными валами, статорные обмотки каждой из которых подсоединены к своей энергосистеме путем формирования сигналов управления асинхронизированными машинами в функции от разности частот скольжения объединяемых энергосистем, отличающийс я тем, 4to, с целью расширения диапазона и повышения надежности работы устройства, дополнительно измеряют текущие амплитудные значения напряжений на кольцах роторов асинхронизированных машин, формируют сигналы, пропорциональные разности текущего и предельно допустиNttiix напряжений на кольцах роторов дои машины, и полученными сигналами воздействуют на скорость вращения роторов указанных машин. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 32000, кл. Н 02 Р , 1968. 2. Авторское свидетельство СССР N 647793, кл. Н 02 3 3/06. 1976.
