(S) НАТЯЖНОЙ.ПРИВОД с ГИБКОЙ СВЯЗЬЮ
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонатяжной привод с гибкой связью | 1980 |
|
SU937836A1 |
| Устройство для передвижения по вертикальным опорам Л.Н.Бульмана | 1991 |
|
SU1796217A1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Устройство для установки труб в трубные решетки теплообменников | 1983 |
|
SU1186452A1 |
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| Автоматизированный комплекс для штамповки | 1982 |
|
SU1058684A1 |
| Устройство для срезания волосяного покрова с меховых шкур | 1982 |
|
SU1124040A1 |
| Швейный полуавтомат | 1976 |
|
SU672250A1 |
| Кантователь крупногабаритных изделий | 1987 |
|
SU1433724A1 |
| Ленточно-шлифовальный станок | 1980 |
|
SU975348A2 |
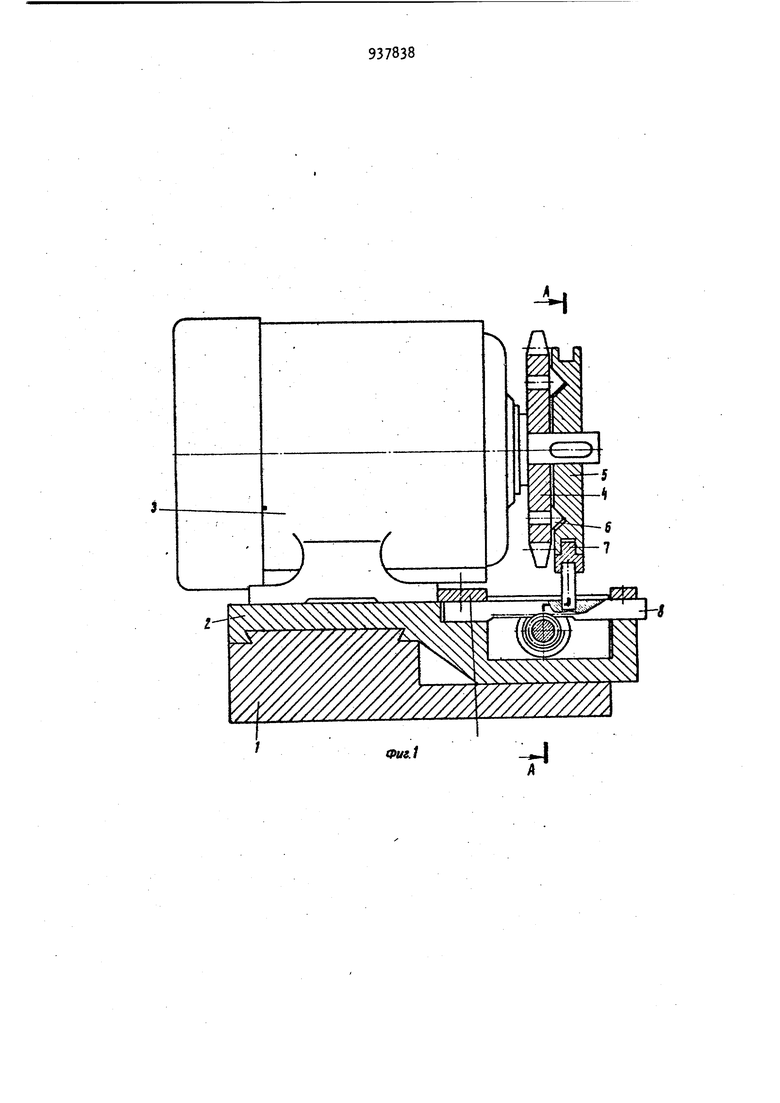
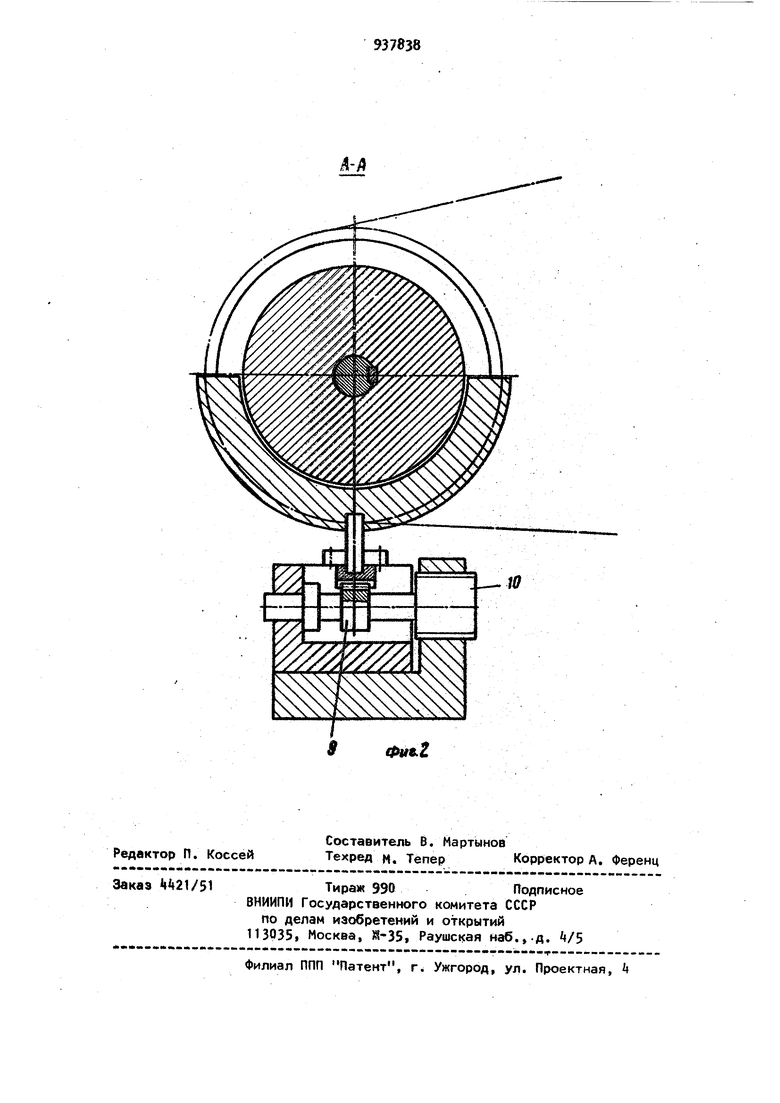
Изобретение относится к машиностроению и может быть использовано во всех отраслях народного хозяйства для натяжения гибкой связи в передач Известна передача с гибкой связью содержащая веду1чий и ведомый шкивы, охватывающую их гибкую связь и винтовой механизм изменения натяжения ветвей L 1 J. Недостатком таких передач является переиатяжение гибкой связи, не соответствующее передаваемой нагрузк Наиболее близким по технической сущности к изобретению является натяжной привод с гибкой связью, содержащий неподвижное основание, имеющее направляющие, установленную на них раму с расположенным на ней электродвигателем, размещенную на валу электродвигателя звездочку и ме ханизм перемещения рамы, представляющий собой пружину, обеспечивающую начальное натяжение гибкой связиС2 3. Однако в подобных передачах натяжение гибкой связи зависит от направления вращения вала электродвигателя . Цель изобретения - обеспечение автоматического натяжения гибкой связи в зависимости от передаваемой нагрузки при реверсивной работе приводаУказанная цель достигается тем, что натяжной привод, содержащий не подвижное основание, имеющее направляющие, установленную наних раму с расположенным на ней электродвигателем, размещенную на валу электродвигателя звездочку и механизм перемещения рамы, снабжен полумуфтой, установленной на валу электродвигателя и связанной со звездочкой коническими пальцами, в основании выполнено отверстие с винтовой нарезкой, а механизм перемещения рамы представляет собой размещенную в ней с возможностью перемещения перпен393дикулярно к направляющим основания рейку с вилкой, взаимодействующую с полумуфтой, и зацепляющуюся с рейкой вала-шестерни, один конец которого имеет винтовую нарезку, взаимодействующую с соответствующей нарезкой основания, а другой связан с рамой. На фиг. 1 изображен натяжной привод, продольный разрез; на фиг. 2 разрез А-А на-фиг, 1. Привод содержит основание 1 имею щее отверстие с винтовой нарезкой, подвижную раму 2 с установленным на ней электродвигателем 3 на валу которого подвижно, установлена звездочка (может быть шкив) и на скользящей шпонке - полумуфта 5 связанная с последней коническими пальцами 6 Полумуфта 5 взаимодействует с вилкой 7, жестко скрепленной с рейкой 8 Рейка 8 входит в зацепление с валомшестерней 3, один конец которого связан с рамой 2, а другой имеет вин товую нарезку 10, взаимодействующую с соответствзоощей нарезкой основа™ ния 1 . Работает натяжной привод за счет силового уравновешивания в контакте с коническими пальцами 6 действующих окружных усилий и преобразованных механизмом перемещения рамы осевых сил. При взаимодействии полумуфты 5 со звездочкой } посредством конических пальцев 6 независимо от направления вращения вала электродвигателя 3 возникающая осевая сила на полумуфте 5 посредством вилки 7 перемещает рейку 8, которая, находясь в зацеплении с валом-шестерней Э, заставляет его поворачиваться и чере винтовую нарезку 10 изменяет межосевое расстояние, т.е. натяжение гибкой нити. Благодаря автоматическому натяжению гибкой связи, реверсивной работе привода повышается долговечность гибкой связи, подшипников и валов привода. Формула изобретения Натяжной привод с гибкой связью, содержащий неподвижное основание, имеющее направляющие, установленную на них раму с расположенным на ней электродвигателем, размещенную на валу электродвигателя звездочку и механизм перемещения рамы, отличающийся тем, что, с целью автоматического натяжения гибкой связи при реверсивной работе привода, последний снабжен полумуфтой, установленной на валу электродвигателя и связанной со звездочкой коническими пальцами, в основании выполнено отверстие с винтовой нарезкой, а механизм перемещения рамы представляет собой размещенную в ней с возможностью перемещения перпендикулярно к направляющим основания рейку с вилкой, взаимодействующую с полумуфтой, и зацепляющуюся с рейкой вала-шестерни, один конец которого имеет винтовую нарезку, взаимодействующую с соответствующей нарезкой основания, а другой связан с рамой. Источники информации, принятые во внимание при экспертизе 1.Детали машин. Расчет и конструирование. Справочник под ред. Ачеркана, М., Машиностроение, 19б9, т. 3, с. , рис. 13. 2.Мартынов В.Ко О связи начальных и рабочих натяжениях ветвей в ременной передаче. Вестник машиностроения, 1973 N° 5, с. 33, рис. 2 (прототип).
