вательно соединенных замыкающих контактов первого датчика выходной позиции поперечного транспортера и второго реле блока, а другая - из последовательно соединенных замыкающего контакта первого реле и замыкающего контакта третьего реле блока, который зашунтирован размыкающим контактом первого датчика входной позиции продольного транспортера, при этом второе и третье реле блока подключены к источнику питания соответственно через размыкающий контакт первого датчика выходной позиции поперечного транспортера и замыкающий контакт первого датчика входной позиции продольного транспортера, а размыкающий контакт первого реле блока подключен к контактно-диодной матрице.
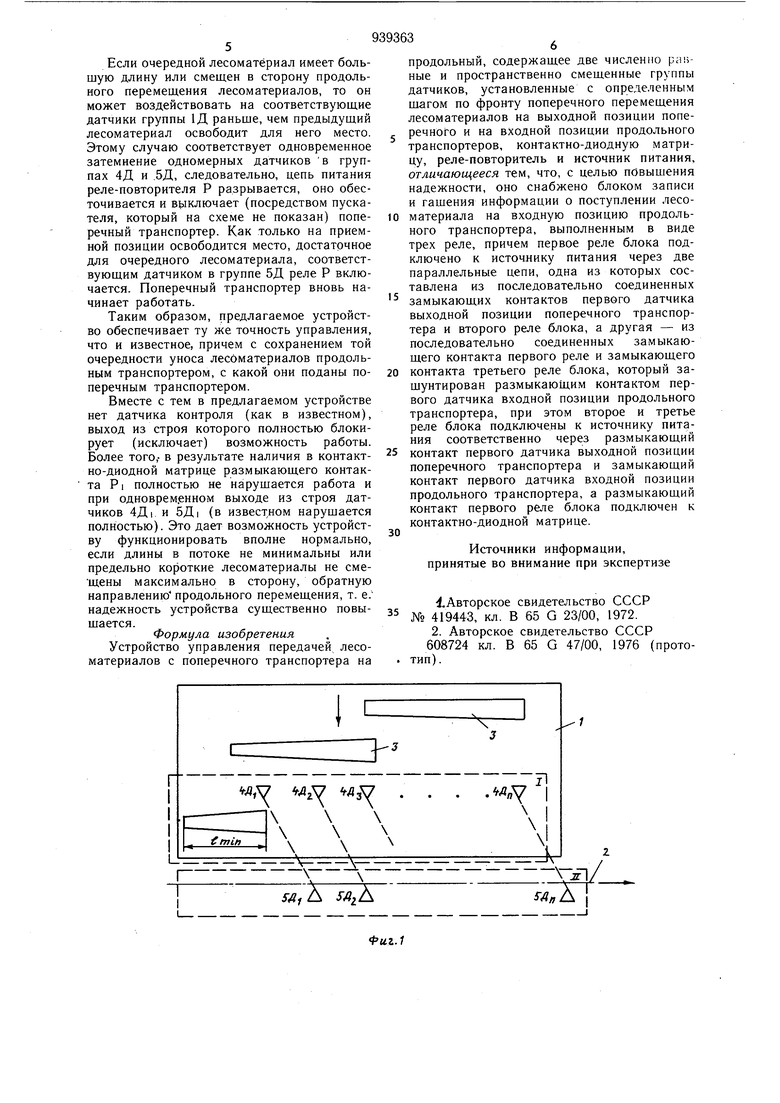
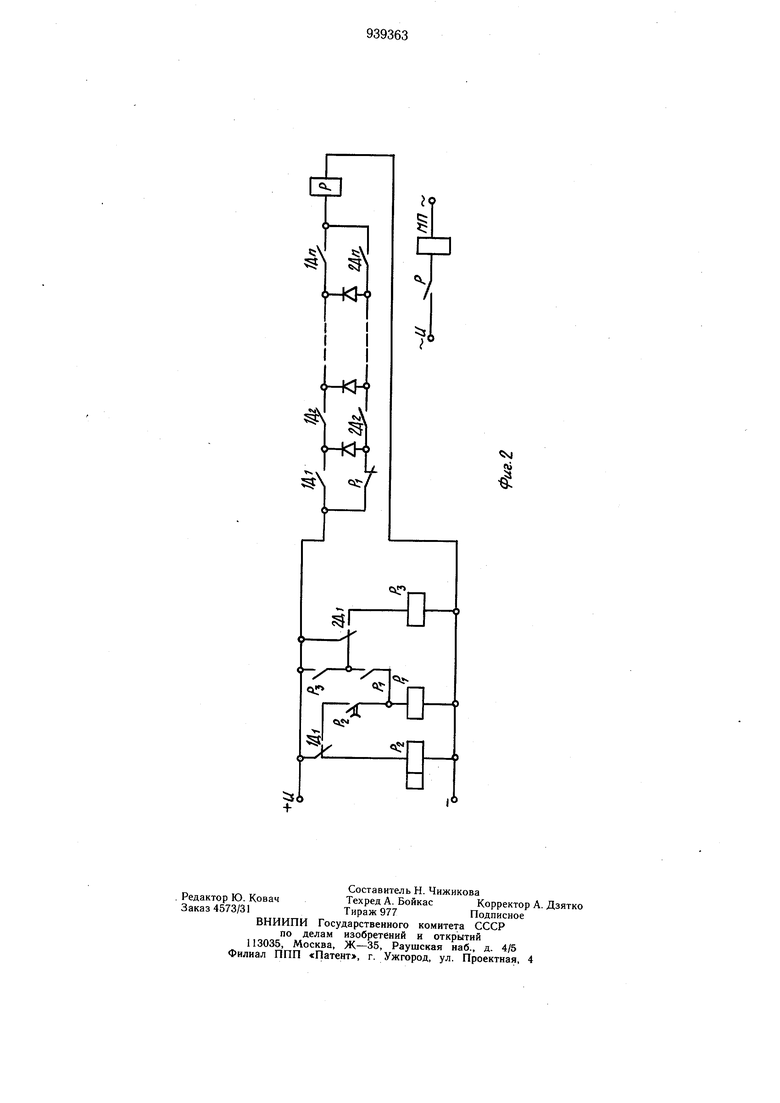
На фиг. 1 представлено расположение датчиков на конвейере; на фиг. 2 - принципиальная электрическая система устройства.
Технологическое оборудование включает поперечный Д и продольный 2 транспортеры. Направление перемещения лесоматериалов 3 показано стрелкой. На выходной позиции I транспортера расставлена первая группа из п датчиков 4Д. Первый датчик 4Д1 этой группы отстоит от левого края на расстоянии, равном минимальной длине лесоматериала Imin . в группе датчики расставлены с щагом S. На входной позиции II продольного транспортера Т с тем же щагом s расставлена вторая группа из п датчиков 5Д, смещенная относительно первой группы на величину s в сторону продольного перемещения лесоматериалов. Датчики в принципе могут быть любого типа. При изображении принципиальных схем (фиг. 2) приняты датчики фотоэлектрического типа прямого действия, при котором замыкающий контакт замкнут, если свет попадает на фотоэлемент, и разомкнут, если свет перекрыт. Первое реле PI трехрелейного блока подключено к источнику питания U через две параллельные цепи, одна из которых составлена из последовательно соединенных замыкающих контактов датчиков 4 D i и второго реле Р2 блока, а другая - замыкающих контактов Р| и РЗ. Контакт РЗ защунтирован размыкающим контактом датчика БД. Второе реле Рг-подключено к источнику питания через размыкающий контакт датчика 4Д|, а третье реле РЗ- через замыкающий контакт датчика ЗДь
Замыкающие контакты датчиков группы 4Д, а также размыкающий контакт реле PI и замыкающие контакты датчиков 5Д2+п соединены в две последовательные цепи, начальные и конечные точки которых объединены непосредственно, а промежуточные - через диоды 3 с проводящим направлением от контактов датчиков 5Д к к контактам датчиков 4Д. Образованная таким образом контактно-диодная матрица
включена между одним полюсом источника питания и обмоткой реле-повторителя Р.
В исходном состоянии устройства замыкающие контакты всех датчиков замкнуты, реле-повторитель включен, транспортеры
работают. При этом реле Р и Pj обесточены, а реле Рд находится в сработанном состоянии.
Пусть данный лесоматериал имеет минимальную длину и предельно смещен в сторону, обратную направлению продольного перемещения. При его движении в поперечном направлении датчик 4Д| перекрывается, в результате чего срабатывает реле Р первого блока реле и своим контактом подготавливает цепь включения реле Рь После прохождения лесоматериала мимо датчика 4Д1 его замыкающий контакт замыкается, реле Р| срабатывает, замыкающим контактом встает в режим памяти (самоблокировки) , а размыкающим контактом рвет нижнюю цепь контактно-диодной матрицы. К обесточиванию реле-повторителя Р это не приводит, поскольку в это время замкнут контакт 4Д1 матрицы.
Как видим, запись информации о поступлении лесоматериала на входную позицию продольного транспортера производится не в момент его воздействия на датчик 4Д1, а после заверщения этого воздействия, когда контакт 4Д1 в матрице замкнут. Именно поэтому ложного отключения поперечного транспортера 1 не происходит.
0 Попав на позицию II и продвинувщись вперед, данный лесоматериал перекрывает датчик 5Д1, его замыкающий контакт размыкается и .реле РЗ отпускает. Цепь самоблокировки реле Р|, однако, не разрывается, поскольку контакт РЗ в это время защунтирован размыкающим контактом датчика 5Д |. Реле-повторитель продолжает оставаться под током.
Данный лесоматериал продолжает перемещаться продольным транспортером 1. В
0 момент его прохождения мимо датчика 5Д1 вновь включается реле РЗ, но чуть раньше, т. е. размыкающим контактом 2Д1 цепь самоблокировки реле PI была разорван-а, а время отпускания PI меньще времени срабатывания РЗ. Поэтому реле Pi отпускает. Как видим, реле Рз в схеме играет роль как бы поляризатора сигнала датчика 5Д1 (при затемнении 5Д1 его сигналом реле PI не отключается, а при засветке отключается). Как видим, не только запись информации, но и ее гащение блоком выполняются не как обычно, т. е. не при начале воздействия, а после воздействия (в данном случае на 5Д,).
На следующем лесоматериале той же минимальной длины и той же ориентации
5 датчики и релейный блок работают в той же последовательности, реле Р не отключаетс.я, поперечный транспортер работает безостановочно.
Если очередной лесоматериал имеет большую длину или смещен в сторону продольного перемещения лесоматериалов, то он может воздействовать на соответствующие датчики группы 1Д раньше, чем предыдущий лесоматериал освободит для него место. Этому случаю соответствует одновременное затемнение одномерных датчиков в группах 4Д и .5Д, следовательно, цепь питания реле-повторителя Р разрывается, оно обесточивается и вь1ключает (посредством пускателя, который на схеме не показан) поперечный транспортер. Как только на приемной позиции освободится место, достаточное для очередного лесоматериала, соответствующим датчиком в группе 5Д реле Р включается. Поперечный транспортер вновь начинает работать.
Таким образом, предлагаемое устройство обеспечивает ту же точность управления, что и известное, причем с сохранением той очередности уноса лесоматериалов продольным транспортером, с какой они поданы поперечным транспортером.
Вместе с тем в предлагаемом устройстве нет датчика контроля (как в известном), выход из строя которого полностью блокирует (исключает) возможность работы. Более того,- в результате наличия в контактно-диодной матрице размыкающего контакта Р1 полностью не нарущается работа и при одновременном выходе из строя датчиков 4Д1 и 5Д| (в известном нарущается полностью). Это дает возможность устройству функционировать вполне нормально, если длины в потоке не минимальны или предельно короткие лесоматериалы не смешены максимально в сторону, обратную направлению продольного перемещения, т. е. надежность устройства существенно повыщается.
Формула изобретения
Устройство управления передачей лесоматериалов с поперечного транспортера на
продольный, содержащее две численно ранные и пространственно смещенные группы датчиков, установленные с определенным шагом по фронту поперечного перемещения лесоматериалов на выходной позиции поперечного и на входной позиции продольного транспортеров, контактно-диодную матрицу, реле-повторитель и источник питания, отличающееся тем, что, с целью повышения надежности, оно снабжено блоком записи и гашения информации о поступлении лесоматериала на входную позицию продольного транспортера, выполненным в виде трех реле, причем первое реле блока подключено к источнику питания через две параллельные цепи, одна из которых составлена из последовательно соединенных замыкающих контактов первого датчика выходной позиции поперечного транспортера и второго реле блока, а другая - из последовательно соединенных замыкающего контакта первого реле и замыкающего
0 контакта третьего реле блока, который защунтирован размыкающим контактом первого датчика входной позиции продольного транспортера, при этом второе и третье реле блока подключены к источнику питания соответственно через размыкающий
контакт первого датчика выходной позиции поперечного транспортера и замыкающий контакт первого датчика входной позиции продольного транспортера, а размыкающий контакт первого реле блока подключен к
контактно-диодной матрице. 0
Источники информации, принятые во внимание при экспертизе
.Авторское свидетельство СССР № 419443, кл. В 65 G 23/00, 1972.
2. Авторское свидетельство СССР 608724 кл. В 65 G 47/00, 1976 (прото. тип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления передачей лесоматериалов с поперечного транспортера на продольный | 1976 |
|
SU608724A1 |
| Устройство для управления сортировкой лесоматериалов | 1980 |
|
SU980867A1 |
| Устройство для сортировки лесоматериалов по длине | 1976 |
|
SU1069879A1 |
| Автоматизированный многопильный станок | 1983 |
|
SU1130458A1 |
| Устройство управления сортировкой лесоматериалов | 1979 |
|
SU856592A1 |
| Устройство управления сортировкой лесоматериалов | 1984 |
|
SU1247841A2 |
| Устройство управления сортировкой лесоматериалов | 1981 |
|
SU1102642A1 |
| АВТОМАТИЗИРОВАННЫЙ КЛАСС ПРОГРАММИРОВАННОКОНТРОЛЯ(вС1гсоюзн | 1971 |
|
SU292186A1 |
| Устройство для подачи и точного останова лесоматериалов на раскряжевочных установках | 1989 |
|
SU1787764A1 |
| Устройство для измерения диаметра бревен | 1971 |
|
SU494597A1 |
лг, л МгЛ
5g
